

基于使用A4988驱动程序和HC-05 bt模块构建自平衡机器人
描述
您好朋友,这篇文章是关于DIY自平衡机器人的,我将向您展示如何构建自己的自平衡机器人。
我使用定制的PCB,Arduno nano,MPU6050,A4988驱动程序,HC-05 bt模块,MDF板和一些硬件来构建此自平衡机器人,
详细材料清单可在本文中找到。
Balancingwii固件和EZ-GUI此项目中使用 android应用程序通过蓝牙连接控制机器人。
因此,让我们从一些基本的自平衡机器人开始。
自平衡机器人的基础知识:
自平衡机器人是指机器人通过不断地调整其位置来平衡自己在两个轮子上的位置。
陀螺仪传感器用于自平衡机器人中,该传感器连续将机器人方向数据发送到控制器。
根据该数据控制器的命令,电机正转或反转以保持机器人的笔直位置。
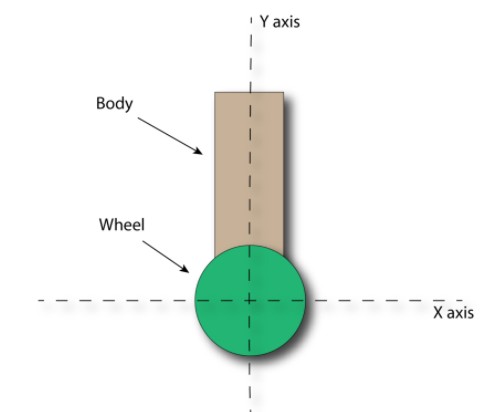
这是自平衡机器人的理想位置,身体完美地向上注视着车轮。Y轴与机器人的身体之间的夹角为零。
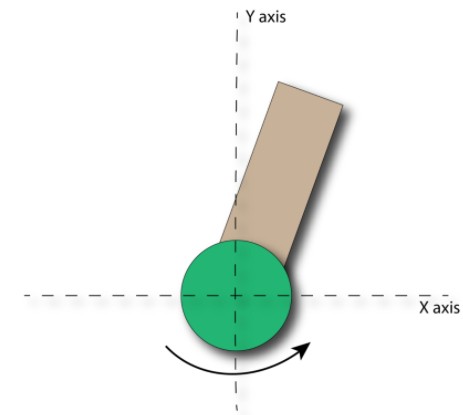
当身体向前倾斜时,Y轴与身体之间会存在一定角度。
MPU6050陀螺仪传感器检测到该角度,然后将此数据发送到Arduino。
Arduino现在执行PID计算,并命令步进电机
正向运行,以将倾斜角最小化到零度。
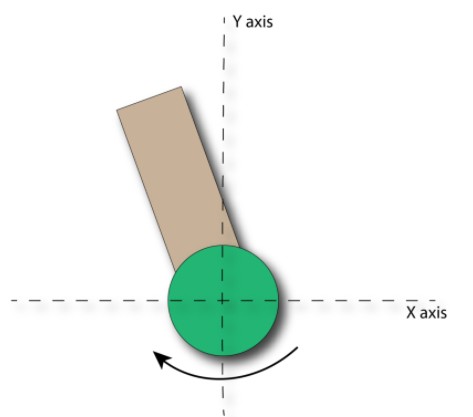
如果机器人向后倾斜,电机将向后旋转并将倾斜角校正为零,也会发生同样的情况。
机器人继续以每秒400次的速度向前和向后反转电动机,因此我们看起来它就像机器人在其位置上一样稳定。
所需组件
Arduino Nano………………………。.1号
MPU605陀螺仪传感器……………….1号
Nema 17步进电机………….2号
100mm车轮…………………………。.2号
A4988步进驱动器IC…………。.2号
HC-05蓝牙模块………….1号。
4mm MDF板。
150mm M5螺纹杆——4个
一些螺母和螺栓
责任编辑:pj
-
用于Grbl控制器的A4988驱动程序2022-07-04 1744
-
Arduino Uno l两轮自平衡机器人 电机驱动无输出求解2025-10-15 4817
-
关于两轮自平衡机器人载重问题2016-11-24 4747
-
基于 ATMega328p-PU 的迷你平衡机器人设计2021-10-14 11604
-
制作一个迷你平衡机器人2022-07-07 2628
-
平衡机器人护盾的资料分享2022-09-05 1496
-
A4988电机驱动2016-05-03 2967
-
基于JJBoover的远程控制ARDUNO自平衡机器人资料下载2021-08-30 1518
-
如何制作WiFi控制的自平衡机器人2022-10-28 1117
-
使用TensorFlow对自平衡机器人进行手势控制2022-11-09 970
-
Magicbit的自平衡机器人2022-11-24 801
-
带有BT Web控制的Arduino自平衡机器人2022-11-29 579
-
基于Arduino UNO的自平衡机器人2022-12-08 785
-
自平衡机器人的构建2023-02-09 1078
-
二轮自平衡机器人开源设计2023-06-12 1162
全部0条评论

快来发表一下你的评论吧 !
