

探究多Agent的传感器管理系统研究与设计
电子说
描述
本文提出了一种传感器管理系统框架,给出了基于多Agent的解决方案。该结构通过多个Agent间的相互协商来实现传感器任务的分配,较好地克服了在融合中心存在的缺陷。并在此基础上着重探讨各Agent之间的协调合作问题,实现了基于KQML语言的各Agent之间的协调机制。
1 引 言
多传感器系统能从不同的角度和视野获取其观测环境更多的全局信息,在军事和民用领域正受到越来越广泛的重视。为适应现代战场变化,获得最佳的作战效果,许多研究人员开始把注意力放在对传感器资源进行自动或半自动管理的研究上,充分发挥各个传感器的效能。
与此同时,随着指挥自动化建设的不断前进和更新,越来越多的遗留系统摆在研究人员的面前,如何合理利用这些遗留系统也是科研人员需要解决的一个问题。一个方案就是包装遗留部件,为他们提供“Agent层次”的功能,使得它们可以和其它的软件部件进行通信和合作。
2 传感器管理现状
传感器管理的核心问题就是依据一定的最优准则,确定目标选择何种传感器以及该传感器的工作方式及参数。传感器管理系统(SMGS)的任务就是利用有限的传感器资源,满足对多个目标和扫描空间的要求,以得到各具体特性的最优度量值(检测概率,截获概率,传感器自身的发射能力,航迹精度或丢失概率等),以最优准则对传感器资源进行合理分配,选择传感器的工作方式和工作参数。目前的传感器管理的结构则分为集中式和分布式。
2.1集中式管理结构
在集中式管理结构中,由融合中心向所有的传感器发送其需要执行的任务和完成该任务的参数集或运行模式。其缺点是融合中心难以对各个传感器的负载情况做出实时的*估,在多任务时会造成负载不均衡,甚至会造成个别传感器严重过载而无法完成任务,另外,当传感器数目增多时,融合中心的计算量会急剧上升,通讯量也会大大增加。
2.2分布式管理结构
在分布式管理结构中,将管理功能分布在系统的不同位置或不同传感器中。其不足是信息冗余会带来严重问题,此外,如果没有一套公共的通讯设施,网络中各节点之间的数据交换只能严格按端到端的方式进行,发送端与接收端之间的延时会产生网络中不同部件的全局状态出现瞬间的不一致,从而导致系统整体性能的下降。任务冲突和竞争使任务协调变得更加复杂。
3 基于多Agent的传感器管理系统
Agent是来自于分布式人工智能的一个概念模型,通常是指具有目标、行为和知识,能在不确定性环境中,根据自身能力、状态、资源、相关知识以及外部环境信息,通过规划、推理和决策实现问题求解,并进行相应的活动,自主地完成特定任务并达到某一目标的实体。
多Agent系统(MAS)是一组为实现某一全局目标,通过通信网络或计算机网络相互连接起来的系统。其中的各Agent必须相互协商、协调和协作才能完成共同的任务,以实现全局目标。MAS以其适应环境的动态自组织能力和开放式的基础结构而在许多领域受到重视。
3.1 系统构架及特点

⑴决策过程分布在网络上的各节点中,这种策略允许发挥各传感器节点自身的管理潜能(局部管理器对其自身的传感器任务进行决策);
⑵全局系统任务管理器仅需对所属传感器提出任务要求,然后对系统任务的完成情况(性能指标)进行监控,不需对传感器进行具体的管理;特别值得强调的是,由于传感器Agent的设置,使传感器具有高度的自主性及与设备无关性(传感器与融合节点之间以及传感器之间的信息交换可通过基于标准化的请求/响应查询语言及情报数据链实现),这为传感器的机动组网创造了有利条件;
⑶系统中的每个节点对应于一个物理实体或决策实体,它们之间通过消息进行协调,系统容易构造;
⑷采用基于多Agent的系统,决策者在模型系统上所作的决策能够很快在实际运行中实现,易于实现;
⑸一般的模拟方法只能*估事先设定好的决策方案的效果,而不能建议产生新的方案,即只能回答“what-if”的问题,而不能回答“what’s best”,多Agent系统为回答“what’s best”问题提供了可能性。
3.2 多Agent的SMGS模型中各Agent的运行机制
⑴融合Agent:为目标、传感器配对提供目标状态、属性信息。对各传感器发送来的所有相关信息进行数据融合;确定在下一个传感器管理周期各传感器代理需完成的系统任务及其全局性能指标;对系统任务的性能指标进行监控,以便确认所要求的性能指标是否达到。
⑵传感器Agent:获取目标和传感器数据;对经协商后分配的传感器任务进行管理;对与其他网络节点的数据通讯进行控制。
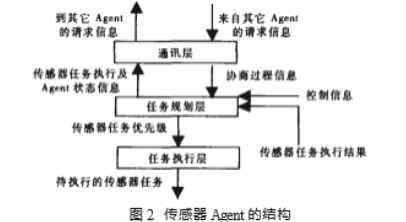
任务执行层的功能取决于传感器的类型及其完成传感器任务的能力。
任务规划层负责确定在下一个管理周期传感器需完成的任务集,并能对融合中心或其他代理发送来的信息以及操作员提供的信息进行处理获取环境态势知识,在此基础上确定各任务所对应的优先级。
Agent内部规划层和执行层之间的信息传送由通讯层负责,该层同时也支持分布式决策中的协商过程,它接收来自其它代理的执行请求、通知或结果信息。协商过程要求能获知传感器完成某项任务的能力,通讯层通过规划层可了解代理完成任务的现状,一旦由其它代理建议的任务被接受,通讯层就会把经协商确定的传感器级性能指标下传到其它层。
如果某项任务无法执行,通讯层将要求的传感器性能指标与规划层中的信息进行比较,确定应该由其它Agent执行的一组行为,或者将结果通知给其它Agent,只有那些能被Agent完成的任务才传送到规划层。
⑶方案生成Agent:根据预先设置的各传感器“特长”生成“传感器”或“传感器组”与任务的可选配对方案,给当前监测空间出现的某特定目标,配对一个特定传感器或传感器组合对其进行进一步检测,以提供该目标的信息。
⑷方案优化Agent:按照任务需求优选上述方案,形成目标优先级排序。
⑸传感器控制Agent:是一个转换模块,负责把传感器分配方案转换为传感器可执行的命令,同时还完成传感器的模式选择、参数选择等具体操作。
⑹任务规划Agent:负责具体的传感器任务分配。
依据以上几方面提供的依据,形成传感器管理方案,直接对传感器配置进行调节。因此,基于Agent的传感器管理系统对形成数据融合系统的闭环控制模式起着反馈调节作用,增加了系统的鲁棒性。
4 多Agent间的协调机制
SMGS强调各个实体间的协同工作,因此是否能够协调地完成预定任务,是多系统应用于的关键问题之一。Agent之间的协调机制可以用多种方法实现,通讯是各获取信息以进行协商与协调必不可少的手段。我们研究重点是基KQML(Knowledge Query and Manipulation Language)的Agent通讯与协调机制在SMGS系统中的应用。
4.1 KQML语言
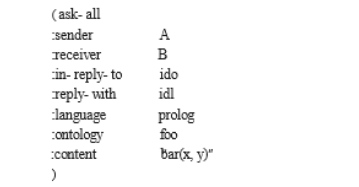
对于Agent中的任何一种协作,方法和语言是不可或缺的。现在通讯语言有了很大的发展。这些语言定义了语法和语义用于Agent间的通讯。KQML是一种用于软件间交换信息和知识的语言和协议,为消息的表达和处理提供了标准的格式。其主要优点有: ⑴具有灵活的结构和良好的可扩充性;⑵独立于网络传输机制;⑶独立于内容层表达语言;⑷能够满足间信息传递的基本要求。
例如:主体A发送一个动作表达式到主体B:
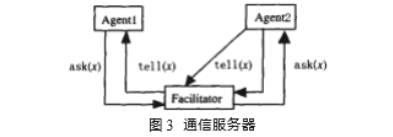
4.2 通信服务器
在KQML中,不是所有的对话都是一种简单的问题/回答处理模型。每个主体可以使用ask(x)登录它的知识到通信服务器。一个主体使用代理言语行为寻找其它主体提供它所需要的信息。通信服务器接收到查询就寻找具有适当知识的主体。
SMGS系统中各进行协调时,各Agent对活动进行审查,若发现某个Agent活动在自身当前条件下不能满足,则向相关Agent发出协调请求,参与协调的Agent可以通过黑板方式或其他方式进行协商。
5 结束语
本文提出了一种新的传感器管理方法,即基于多Agent技术的管理方法。通过上述方式构造的传感器管理系统利用了Agent基于知识表示及协调求解能力,具有实施简单、系统运行高效、所需环境要求低等特点。充分发挥了传感器自身的决策能力,减少决策过程对融合中心的依赖,提高了整个传感器监视网络的生存能力。下一步还应针对不同的需求进行广泛的仿真实验以分析各种管理策略的性能,并对规则库进行修改和调整,在实际应用中对不同情况区别对待,充分利用系统资源,提高系统运作效率。
编辑:jq
-
基于多Agent系统的智能家庭网络研究2009-06-14 4440
-
基于多Agent的传感器管理系统研究与设计2018-11-14 2109
-
关于水下声学传感器网络无线多点通信系统研究不看肯定后悔2021-06-07 1952
-
基于多Agent 技术的分布式测控系统研究2009-06-01 793
-
基于多Agent的洪水预报系统研究2009-06-06 533
-
基于多Agent 的传感器管理系统研究与设计2009-09-09 621
-
基于μc/OS-II的多传感器测控系统研究2010-01-12 1147
-
多Agent系统体系结构及建模方法研究2015-11-12 723
-
基于ZigBee无线传感器网络的农业环境监测系统研究与设计2015-11-30 830
-
机器人多传感器测距系统研究与设计2015-12-23 560
-
基于力_力矩传感器的直接示教系统研究_刘昆2017-01-14 818
-
发电厂水处理流程传感器故障检测系统研究_张大海2017-01-19 1012
-
基于多Agent的传感器管理系统2018-03-14 3186
-
基于压力传感器的跌倒检测系统研究手册2021-03-23 1026
-
基于压力传感器的跌倒检测系统研究2021-03-24 1062
全部0条评论

快来发表一下你的评论吧 !
