

基于用于检测障碍物的传感器的3D打印清洁机器人
描述
基于fpga的3D打印清洁机器人。该机器人具有多个用于检测障碍物的传感器和一个用于清洁地板的吸尘器。此外,该机器人还包含一种导航算法,使其能够尽可能高效地驶离房间并相应地对障碍物做出反应。
结构: 转速计数器单元基本上由2个组件组成。 1.磁铁板由3D打印的PLA组成,每个磁铁板包含4个钕磁铁。它们彼此成90度角排列。请注意,磁体的南极朝向传感器安装,因为我使用的霍尔传感器仅检测到正磁场。 2.霍尔传感器是指其输出信号取决于周围磁场的传感器。因此,它们检测磁场,然后更改其输出的电气状态。为了使用FPGA评估输出信号,必须正确连接霍尔传感器。
对于机器人,我使用H501型单极霍尔传感器。在这种情况下,单极意味着传感器仅检测磁体的正极。当施加正磁场时,输出变为高电平状态;当该磁场不再存在时,输出降至GND。 另一个重要功能是施密特触发器。这是一个比较器电路,它将线性输出信号转换为方波信号,以便FPGA可以读取。传感器具有此电路很重要;否则必须在外部构建。
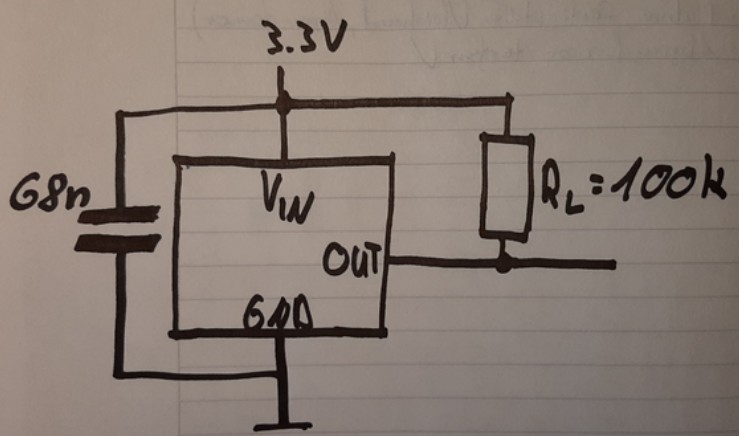
传感器由机器人的3.3V车载电源供电。小铝箔塑料电容器用于抑制干扰。输出信号需要一个值为100k的上拉电阻。
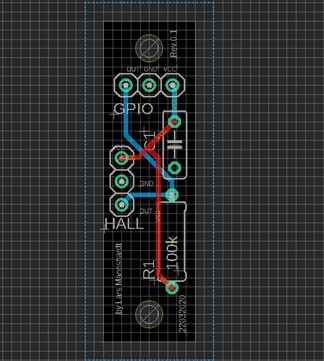
然后,我将此电路转移到Eagle,并订购了电路板。PCB可以很好地装入机器人中为其提供的支架中。
传感器的行为: 输出状态:条件: 0 =》无磁场 1 =》正磁场 注释显示传感器可以检测到两种状态。如果传感器未检测到磁场,则输出端存在低电平。仅当传感器检测到磁体的南极时,才发生高电平。当不再存在磁场时,输出会回落到较低的水平。 在下面的示波器图中可以很容易地看出这种现象。方波信号显示了机器人移动时霍尔传感器的输出:
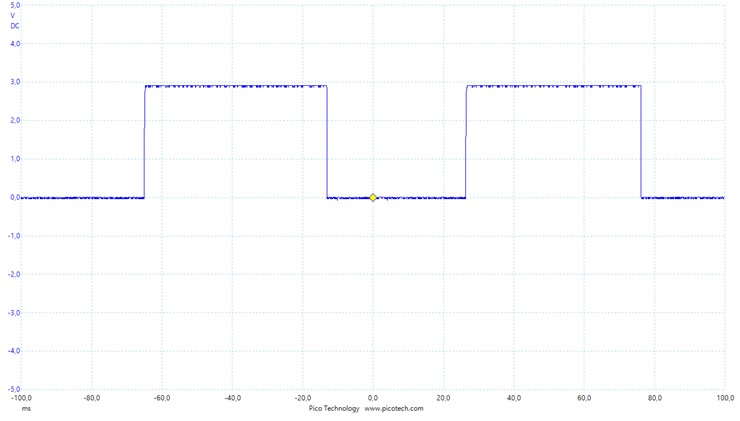
该图显示了霍尔传感器的输出电压随时间(ms)的变化。您会看到由轮的匀速运动产生的周期性方波信号。
责任编辑:pj
-
iTOF技术,多样化的3D视觉应用2025-09-05 375
-
检测障碍物有什么什么传感器?2023-11-08 546
-
超声波传感器在自动清洁机器人的应用2023-06-30 1738
-
障碍物检测和颜色跟随机器人的创建2022-12-23 766
-
怎样设计一个能避开各种障碍物的巡线机器人吗2022-12-07 602
-
基于Arduino的3D打印2轮机器人2022-08-12 4053
-
3D传感器:机器人安全的新方法和新应用2019-04-19 4757
-
基于ARM处理器的吸尘机器人硬件设计2018-11-06 2755
-
Voxel 3D 飞行时间传感器机器人视觉参考设计2018-10-11 3089
-
机器人产品传感器越多,就越能有效避障?2018-08-27 3327
-
超声波传感器在机器人中的应用2018-08-09 8160
-
物联网、AR、3D打印、机器人未来将改变我们的生活?2017-10-19 3018
-
移动机器人的障碍物群检测方法2015-12-25 619
-
中国传动网:搭载3D传感器 iRobot将推智能机器人2014-04-25 2136
全部0条评论

快来发表一下你的评论吧 !
