

探究用双定时器控制单片机输出固定的数量的PWM脉冲!
电子说
描述
最近在逛论坛,看到几个帖子都在咨询如何控制单片机输出固定的数量的PWM脉冲,用于控制电机的转停,刚好前两天本人也需要该功能做测试,我是输出PWM给伺服电机驱动器,驱动器以位置模式工作,收到脉冲就控制电机转动,如果需要精确控制电机转过的角度,就需要给驱动器输入固定数量的脉冲。于是我便用STM32F031的双定时器实现了该功能,下文便详细描述。
我在进行代码编译之前也在网络上搜索过相应的方法,总结起来一共五个方法:
1、单脉冲法,需要一个脉冲中断一次,中断次数多,影响效率
2、一个定时器输出PWM,另一定时器使用输入捕获进行中断计数,与方法1一样,同样需要频繁的中断
3、用主从定时器门控方式,比较繁琐
4、用一个定时器(从)作为另一个定时器(主)的外部时钟触发源
5、高级定时器T1、T8的重复计数方式,RCR计数中断,看手册好像这种方式最简单,能满足一部分人要求,缺点是寄存器只有8位,最多实现255个脉冲计数输出。
我在最初时使用了第2和方法,该方法对于我来说你叫简单,后来在写这篇文章时选择了第4个方法,总结起来还是4比较靠谱,但是这里的第2方法也描述一下,便于大家选择。
方法2:
因为条件限制,干脆说为了省事,我在原来用于其他功能的板子上进行测试,因为只开放了PB3和PB4,所以这里只好用TIM2和TIM3进行测试。
TIM2用于产生PWM脉冲输出,在输出给驱动器的同时将该脉冲也接到PB4,也就是TIM3的输入口,这样TIM3也能接收到TIM2发出的脉冲,TIM3只需要配置为输入捕获,并开启中断,便可以在每次脉冲到来进入中断,在TIM3的中断中去计数,达到需要的脉冲数便关闭TIM2便可。
首先依旧是初始化端口:
先贴一下time.h文件:
* 定义防止递归包含 ----------------------------------------------------------*/#ifndef _TIMER_H#define _TIMER_H /* 包含的头文件 --------------------------------------------------------------*/#include "stm32f0xx.h" /* 宏定义 --------------------------------------------------------------------*/#define TIM6_COUNTER_CLOCK 1000000 //计数时钟(1M次/秒) //预分频值#define TIM6_PRESCALER_VALUE (SystemCoreClock/TIM6_COUNTER_CLOCK - 1)#define TIM6_PERIOD_TIMING (10 - 1) //定时周期(相对于计数时钟:1周期 = 1计数时钟) #define TIM2_COUNTER_CLOCK 24000000 //计数时钟(24M次/秒) //预分频值#define TIM2_PRESCALER_VALUE (SystemCoreClock/TIM2_COUNTER_CLOCK - 1) /* 函数申明 ------------------------------------------------------------------*/void Systick_Init(void);void Delay_ms(__IO uint32_t nTime);void TimingDelay_Decrement(void);void Delay(uint32_t
temp);void delay_us(uint32_t nus);void delay_init();
void TIMER_Initializes(void); void TIMDelay_N10us(uint16_t Times);void TIMDelay_Nms(uint16_t Times);void TIMDelay_Ns(uint16_t Times); void TIMER_PWM_GPIO_Configuration(void);void TIM2_CH2_PWM(uint32_t Freq, uint16_t Dutycycle);void TIMER_IC_Configuration(void); #endif /* _TIMER_H */
因为我的时钟初始化是单独定义的,所以这里未进行时钟的初始化,在参考的我的代码时需注意:
void TIMER_PWM_GPIO_Configuration(void){ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //TIM2引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用模式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //高速输出 GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推完输出 GPIO_InitStructure.
GPIO_PuPd = GPIO_PuPd_UP; //上拉 GPIO_Init(GPIOB, &GPIO_InitStructure); GPIO_PinAFConfig(GPIOB, GPIO_PinSource3, GPIO_AF_2); //复用配置 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; //TIM3引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用模式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
//高速输出 GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推完输出 GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //无上下拉(浮空) GPIO_Init(GPIOB, &GPIO_InitStructure); GPIO_PinAFConfig(GPIOB, GPIO_PinSource4, GPIO_AF_1); }
配置定时器2,TIM2作为PWM的脉冲输出:
/************************************************函数名称 :TIM2_CH2_PWM功 能 :定时器2通道2输出PWM参 数 :Freq -------- 频率 Dutycycle --- 占空比返 回 值 :无作 者 :呐咯密密*************************************************/void TIM2_CH2_PWM(uint32_t Freq, uint16_t Dutycycle){ TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; uint16_t tim2_period; uint16_t tim2_pulse; tim2_period = (uint16_t)(TIM2_COUNTER_CLOCK/Freq - 1); //计算出计数周期(决定输出的频率) tim2_pulse = (tim2_period + 1)*Dutycycle / 100; //计算出脉宽值(决定PWM占空比) /* TIM2时基单元配置 */ TIM_TimeBaseStructure.TIM_Prescaler = TIM2_PRESCALER_VALUE; //预分频值 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
//向上计数模式 TIM_TimeBaseStructure.TIM_Period = tim2_period; //定时周期(自动从装载寄存器ARR的值) TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频因子 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); /* TIM2通道2:PWM1模式配置 */ TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //输出PWM1模式 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
//使能输出 TIM_OCInitStructure.TIM_Pulse = tim2_pulse; //脉宽值 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性 TIM_OC2Init(TIM2, &TIM_OCInitStructure); TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable); TIM_ARRPreloadConfig(TIM2, ENABLE); TIM_Cmd(TIM2, ENABLE); //初始化PWM。}
配置定时器3,作为捕获输入:
void TIMER_IC_Configuration(void){ TIM_ICInitTypeDef TIM_ICInitStructure; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_TimeBaseStructure.TIM_Prescaler = 1 - 1; //1分频(与捕获分频相同) TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式 TIM_TimeBaseStructure.TIM_Period = 0xFFFFFFFF; //定时周期(自动从装载寄存器ARR的值) TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频因子 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //通道1 TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Falling; //捕获极性 TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //捕获选择 TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //捕获分频 TIM_ICInitStructure.TIM_ICFilter = 0; //捕获滤波 TIM_ICInit(TIM3, &TIM_ICInitStructure); TIM3->SR = (uint16_t)~TIM_IT_CC1; //清除中断标志 TIM_Cmd(TIM3, ENABLE); //使能TIM3 TIM_ITConfig(TIM3, TIM_IT_CC1, ENABLE); //使能中断}
关于定时器的通道要根据手册定义来确定,我的只适配我的硬件。
这里需要着重说一下预分频TIM_Prescaler的值和捕获分频TIM_ICPrescaler的值要对应,在上面的代码中这两个值均为1,效果就是每来一个脉冲就会进一次中断。我们只需在中断里进行计数,想要几个脉冲就进中断几次,达到需要的脉冲数就关闭TIM2。如下所示:
配置中断:
NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //IRQ通道:定时器2 NVIC_InitStructure.NVIC_IRQChannelPriority = 0; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure);
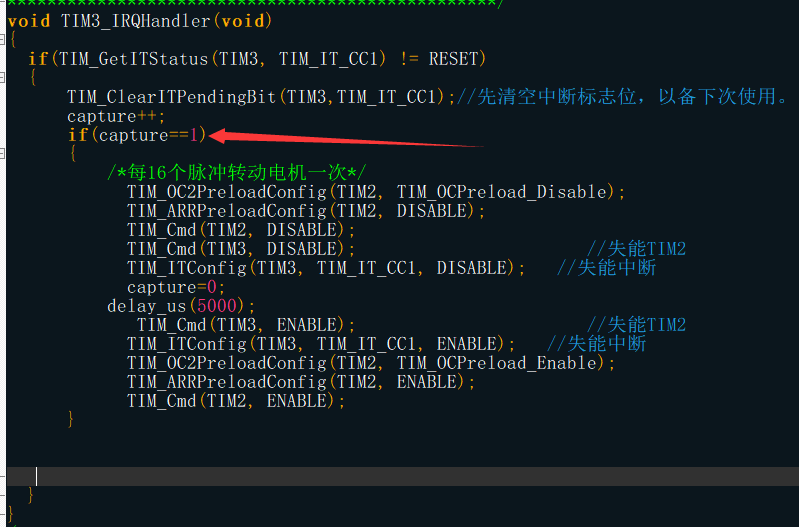
void TIM3_IRQHandler(void){ if(TIM_GetITStatus(TIM3, TIM_IT_CC1) != RESET) { TIM_ClearITPendingBit(TIM3,TIM_IT_CC1);//先清空中断标志位,以备下次使用。 capture++; if(capture==16) { /*每16个脉冲转动电机一次*/ TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Disable); TIM_ARRPreloadConfig(TIM2, DISABLE); TIM_Cmd(TIM2, DISABLE);
TIM_Cmd(TIM3, DISABLE); //失能TIM2 TIM_ITConfig(TIM3, TIM_IT_CC1, DISABLE); //失能中断 capture=0; delay_us(5000); TIM_Cmd(TIM3, ENABLE); //失能TIM2 TIM_ITConfig(TIM3, TIM_IT_CC1, ENABLE); //失能中断 TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable); TIM_ARRPreloadConfig(TIM2, ENABLE); TIM_Cmd(TIM2, ENABLE); } }}/*
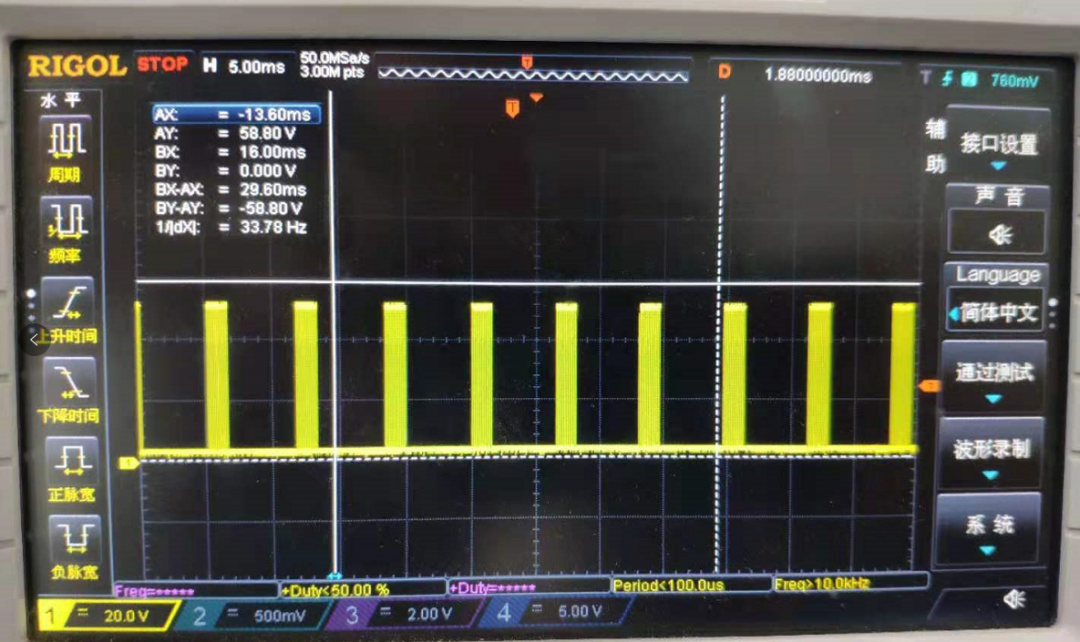
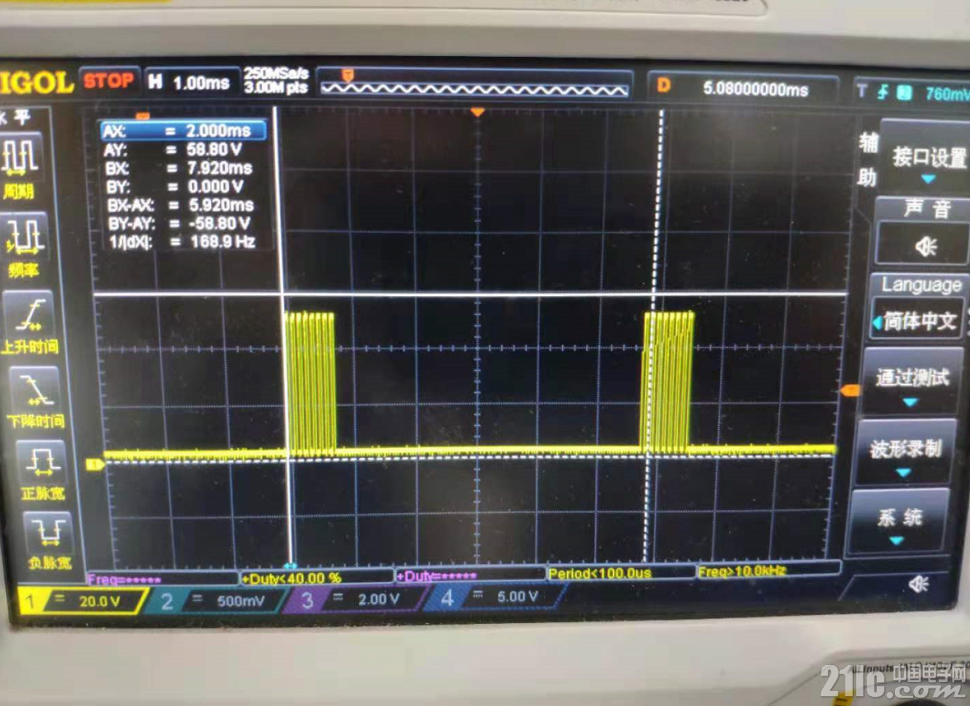
在TIM3的中断函数中,我们定义一个变量capture,每次进入中断该值会加一,进入16次中断,也就是有16个脉冲输入就会满足条件进入if()函数,关闭TIM2和TIM3,延时5000us后再打开这两个定时器,如此循环。可从示波器看现象:
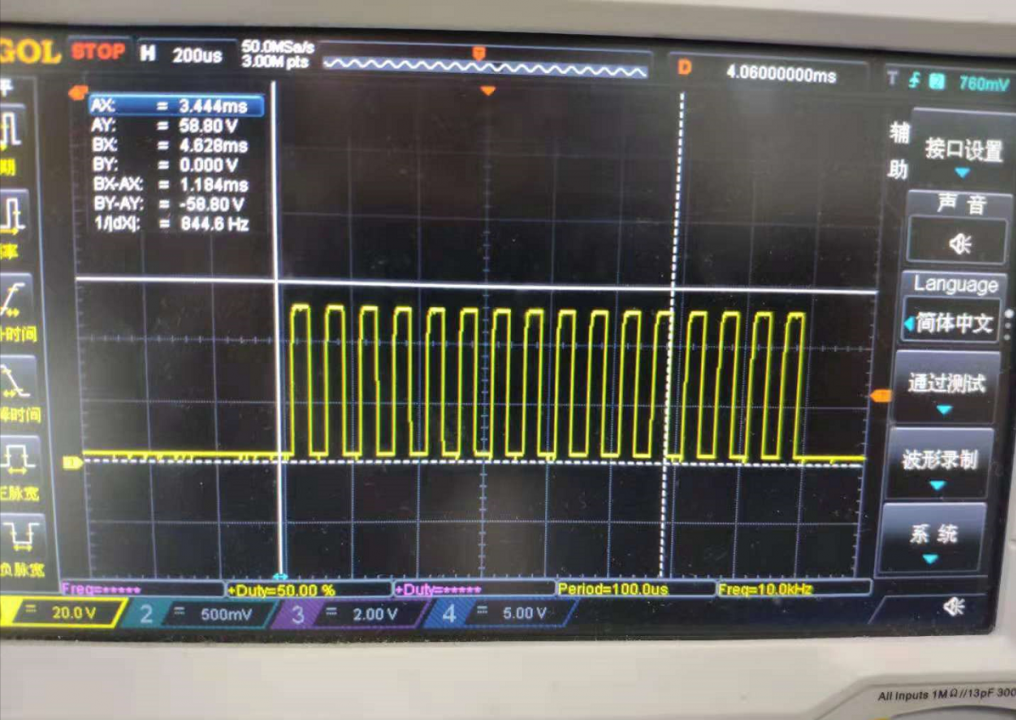
现在我们已经完成了对TIM2的输出固定个数脉冲的试验,但是这种方式每个脉冲都进一次中断太麻烦,于是可以修改预分频TIM_Prescaler的值为8-1,和捕获分频TIM_ICPrescaler的值为TIM_ICPSC_DIV8,便可8个脉冲进一次中断。
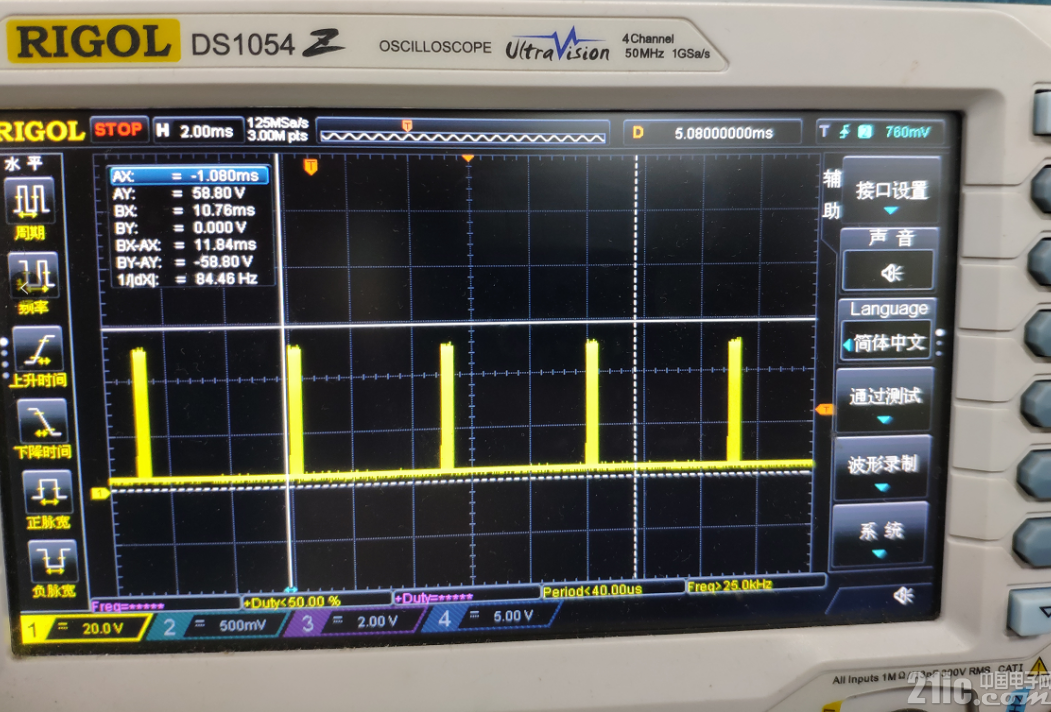
此时也将中断函数里的判断条件改为1,进一次中断便会关闭定时器,我们接上示波器看看现象:
通过示波器我们可以看到,虽然只进了一次中断,但是我们却输出8个脉冲,以此可减少进入中断的次数。至此,通过TIM3的输入捕获控制PWM脉冲数的试验就完成了。 方法4: 方法4是利用主从定时器进行脉宽调制,不占用主时钟,在代码时间要求苛刻和多电机控制时非常实用,可以精准控制。 GPIO的初始化和上文保持不变,仅改变TIM的配置: TIM2设置为主模式
/***********************TIM2初始化函数*****************************参数:****************************************************//******u32 Cycle用于设定计数频率(计算公式:Cycle=1Mhz/目标频率)******返回值:**************************************************//******无*****************************************************/void TIM2_config(uint32_t Cycle){ TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_OCInitTypeDef TIM_OCInitStructure; TIM_TimeBaseStructure.TIM_Period = Cycle-1; //使用Cycle来控制频率(f=48/(47+1)/Cycle) 当Cycle为100时脉冲频率为10KHZ TIM_TimeBaseStructure.TIM_Prescaler =47; //设置用来作为TIMx时钟频率除数的预分频值 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS= Tck_tim TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
//重复计数,一定要=0!!! TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能 TIM_OCInitStructure.TIM_Pulse = Cycle/2-1; //设置待装入捕获寄存器的脉冲值(占空比:默认50%,这可也可以调节如果需要的话将它作为一个参数传入即可) TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性 TIM_OC2Init(TIM2, &TIM_OCInitStructure); //使能通道2 TIM_SelectMasterSlaveMode(TIM2, TIM_MasterSlaveMode_Enable);
//设置为主从模式 TIM_SelectOutputTrigger(TIM2, TIM_TRGOSource_Update); //选择定时器2的触发方式(使用更新事件作为触发输出) TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable); //使能通道2预装载寄存器 TIM_ARRPreloadConfig(TIM2, ENABLE); //使能TIM2在ARR上的预装载寄存器 } TIM3设置为从模式:
/***********************TIM3初始化函数*************************//****参数:****************************************************//******u32 PulseNum用于设定脉冲数量****************************//****返回值:*************************************************//******无*****************************************************/ void TIM3_config(uint32_t PulseNum){ TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; NVIC_InitTypeDef NVIC_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); TIM_TimeBaseStructure.TIM_Period = PulseNum-1; //设置自动重装载周期值 TIM_TimeBaseStructure.
TIM_Prescaler =0; TIM_TimeBaseStructure.TIM_ClockDivision = 0; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); TIM_SelectInputTrigger(TIM3, TIM_TS_ITR1); TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_External1 );// 等同 TIM3->SMCR|=0x07 //设置从模式寄存器 TIM_ITConfig(TIM3,TIM_IT_Update,DISABLE); } 这里的TIM_SelectInputTrigger(TIM3, TIM_TS_ITR1);是设置为内部触发,参数由手册进行获取:

/************************脉冲输出函数**************************//****参数:****************************************************//******u32 Cycle用于设定计数频率(计算公式:Cycle=1Mhz/目标频率)//******u32 PulseNum用于设定输出脉冲的数量(单位:个)************//****返回值:**************************************************//******无*****************************************************/void Pulse_output(uint32_t Cycle,uint32_t PulseNum){ TIM3_config(PulseNum); //设置脉冲数量 TIM_Cmd(TIM3, ENABLE); //使能TIM3(从定时器) TIM_ClearITPendingBit(TIM3,TIM_IT_Update); //清除中断标志位 TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE); //使能更新中断 TIM2_config(Cycle); //使能定时器2(主定时器) TIM_Cmd(TIM2, ENABLE); //使能定时器2// TIM_CtrlPWMOutputs(TIM2, ENABLE); //高级定时器一定要加上,主输出使能}
void TIM3_IRQHandler(void){ if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //TIM_IT_Update { TIM_ClearITPendingBit(TIM3, TIM_IT_Update); // 清除中断标志位 TIM_CtrlPWMOutputs(TIM2, DISABLE); //主输出使能 TIM_Cmd(TIM2, DISABLE); //关闭定时器 TIM_Cmd(TIM3, DISABLE); //关闭定时器 TIM_ITConfig(TIM3, TIM_IT_Update, DISABLE); //关闭TIM2更新中断 }} 当TIM的CNT寄存器的值到达设定的Update值会触发更新中断,此时设定的脉冲数已输出完毕,关闭TIM2和TIM3. 主函数:
该代码本人均已调通,原理部分过于繁杂,这里以本人能力可能无法解释的清除,诸位可参考手册或网络获取相关讲解。
编辑:jq
-
单片机定时器的用法2024-01-04 3323
-
STM32F4单定时器独立输出四路PWM脉冲2021-11-30 1297
-
stm32F051系列 单片机引脚定时器输出pwm波形控制风扇转速2021-11-29 1724
-
51单片机定时器及其应用(3)(测量脉冲频率)2021-11-23 1043
-
嵌入式单片机基础篇(九)之通用定时器(二)PWM输出2021-11-22 1031
-
探究PIC单片机的中断定时器运用2021-10-18 828
-
如何通过STM32F4定时器输出固定数量PWM脉冲?2021-07-16 2613
-
使用51单片机实现定时器控制单灯闪烁的仿真文件免费下载2021-03-03 1316
-
使用单片机的定时器模拟PWM输出实现呼吸灯的程序免费下载2019-09-06 1844
-
如何使用51单片机通过定时器模拟输出多路PWM程序免费下载2019-07-17 1582
-
如何基于51单片机利用定时器的实现PWM的方法详细概述2018-06-12 34447
-
单片机定时器周期计算公式2018-01-22 43555
-
单片机C语言程序设计之定时器控制单只LED2018-01-03 4546
-
AVR单片机定时器输出PWM的设计及注意问题2011-11-09 1993
全部0条评论

快来发表一下你的评论吧 !
