

基于使用Atmega328P和ULN2003步进驱动器制造绘图仪机器人
描述
在该项目中,将制造带有mXY板的XY绘图仪机器人。借助该机器人,可以墙壁,面板或A4纸上绘制图像,还可以打印图片或打印文本。该机器是一种简单的设备,它可以使用普通的笔、电动机和绳子来画画。
该开发板使用Atmega328P和ULN2003步进驱动器。所以可以使用单个板进行该项目。5V 、1A适配器或移动电源足以满足该项目的功耗要求。当两个电动机都运行时,观察到最大电流为0.4A。
所需组件:
1个带Bootloader的ATmega328P-PU
2个ULN2003 DIP16
2个28YBJ-48 5V 5线步进电机
1个CH340G SOP16
B型USB插座
DIP插座28/16引脚
12/16 MHz晶振
L7805 TO-220
10uF电容器
22pF / 0.1uF / 10nF陶瓷电容
LED
电阻10K / 1K
电源插座
2针端子块
2个JST B5B-XH连接器
1个MG90S伺服电机
GT2皮带轮16齿套装
GT2橡胶腰带(5M)
3合1跳线
连接图:
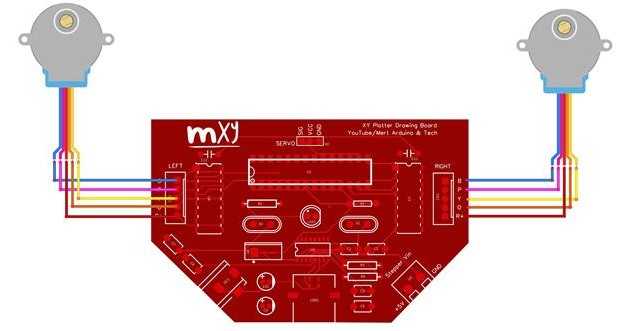
(步进电机和伺服器都需要一根5M的延长电缆线)
机器尺寸图:
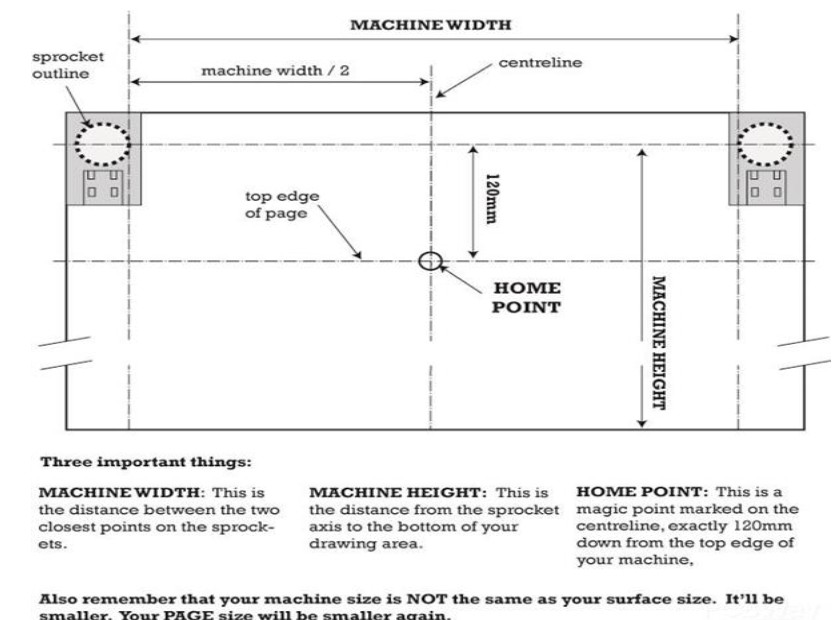
(机器尺寸与表面尺寸不同)
机器宽度:这是链轮上两个最接近点之间的距离(两个皮带轮之间),在机器宽度上调节两个皮带轮之间的尺寸。
机器高度:这是从链轮轴线到图形(面板)区域底部的距离,调整机器高度(滑轮和面板末端之间的高度)。
吊船和托架:
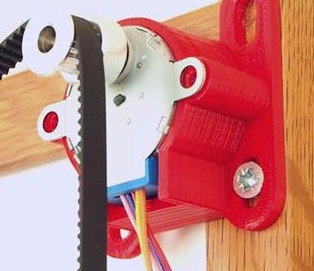
可以在ZIP文件“ Gondola_Bracket_Models”中找到吊船和步进电机安装支架3D模型:
https://github.com/MertArduino/mXY-board-xy-plotter-drawing-machine
源代码:
一、它在Arduino IDE v1.8.5 和 Processing v2.2.1中运行良好
下载并安装Arduino IDE v.1.8.5 https://www.arduino.cc/en/Main/OldSoftwareReleases#previous
下载并安装Processing v2.2.1
https://processing.org/download/?processing
下载mXY-Plotter-Drawing-Machine
https://github.com/MertArduino/mXY-board-xy-plotter-drawing-machine/archive/master.zip
二、Arduino源代码
转到mXY-Plotter-Drawing-Machine \ arduino-source-code-libraries \ libraries文件夹。
将arduino-source-code-libraries \ libraries的内容复制到C:\ Users \ YourPCname \ Documents \ Arduino \ libraries文件夹中。
转到mXY-Plotter-Drawing-Machine \ arduino-source-code-libraries文件夹。
复制polargraph_server_a1文件夹并将其粘贴到C:\ Users \ YourPCname \ Documents \ Arduino文件夹中。
“ polargraph_server_a1.ino”文件是ULN2003驱动程序和28YBJ-48步进电机的编辑副本。您可以在这里获取原始版本 (https://github.com/euphy/polargraphcontroller/releases/tag/2017-11-01-20-30)
打开Arduino IDE
转到文件-》写生簿-》 polargraph_server_a1-》打开polargraph_server_a1源代码。
转到工具-》主板-》 Arduino / Genuino Uno-》 选择板
转到工具-》端口-》 COMx-》 选择端口
按工具栏中的“验证”按钮以尝试对其进行编译。
如果编译成功,请按工具栏中的“上传”按钮以上传它。
一旦这样做,应该确认它是否正常工作-使用主板上的串行监视器,将其设置为57600波特,以确保每两秒钟发出一次“ READY”。
三、处理源代码
转到mXY-Plotter-Drawing-Machine \ processing-source \ Processing库文件夹。
将Processing-source \ Processing库的内容复制到C:\ Users \ YourPCname \ Documents \ Processing \ libraries文件夹中。
复制polargraphcontroller文件夹并将其粘贴到C:\ Users \ YourPCname \ Documents \ Processing文件夹。
开放处理
转到文件-》写生簿-》 polargraphcontroller-》打开polargraphcontroller应用程序源代码。
按工具栏中的“运行”按钮以运行草图。
使用步骤:
一、步进电机规格设置
按工具栏中的“设置”按钮。
将MM PER REV的值定义为64
将“每步骤的步进数”的值定义为4076
将MOTOR MAX SPEED的值定义为1000
将“电机加速”的值定义为200
(有关28BYJ-48步进电机的更多信息在: https://lastminuteengineers.com/28byj48-stepper-motor-arduino-tutorial/)
二、调整绘制区域的大小(如果在A4纸上绘图,请设置A4尺寸)
先标记原点:这是在中心线上标记的魔术点,正好位于机器顶部边缘下方120毫米(12厘米)处。
抓取“中心页面”,然后将“页面位置Y”值设置为120。
第二次单击“中心原点”,并将“原点Y”值设置为120。
三、伺服电机(笔)设置
“笔向上位置”和“笔向下位置”值是伺服电机的工作角度。
单击串行端口,然后从连接的设备列表中选择Arduino的端口。
选择正确的端口后,“无串行连接”显示将变为绿色,并显示已连接的端口号。
单击“命令队列”,并激活命令传输。
单击上载提升范围,然后单击测试提升范围并测试伺服电机角度。
四、最后设置-上传矢量图像并开始打印
保存您的设置。每次打开程序时都加载设置。
单击“输入”选项卡,然后切换到程序的主屏幕。
手动将吊船手动设置为“设置回家”。手动移动吊船并将其移动到先前定义的起始点。在单击“设置原位”之前,必须在每幅图纸之前以这种方式调整吊船。
完成此调整后,单击“设置原点”和“设置笔位置”。
单击“设置区域”以指定您的图形。然后单击“将框架设置为区域”以进行绘制所需的所有设置。
五、 绘制矢量
查找任何矢量绘图图像。从任何转换器平台将图像转换为SVG格式。
从程序中选择“加载向量”后。使用“调整大小矢量”调整图像大小。使用“移动向量”将图像移动到所需区域。然后使用选择区域和将框设置为区域来调整要打印的区域。
单击“绘制矢量”命令以启动机器。
责任编辑:pj
-
ULN2003步进电机驱动电路设计2023-05-02 11176
-
基于定时器中断的ULN2003驱动器/步进电机驱动程序2023-03-16 1423
-
DIY一个ULN2003电机驱动器2022-07-13 2017
-
设计一个低预算XY绘图仪绘图机器人板2022-06-20 1796
-
如何使用ULN2003驱动28BYJ-48步进电机?2021-10-18 2142
-
28BYJ-48步进电机+ULN2003驱动程序是什么2021-07-08 1577
-
ULN2003步进电机驱动相关资料分享2021-06-29 1466
-
基于ULN2003及单片机驱动步进电机的应用案例2017-09-01 2430
-
ULN2003驱动步进电机2016-09-01 2628
-
求ULN2003步进电机驱动的焊接电路图2015-08-02 7796
-
分享一个驱动模块ULN20032014-06-11 8474
-
ULN2003步进电机驱动电路2013-09-05 14703
-
ULN2003步进电机驱动原理及应用程序步进电机驱动原理及应用2013-07-10 28773
全部0条评论

快来发表一下你的评论吧 !
