

L3/L4离不开的高精度地图与定位什么时候才会商用?
描述
L3/L4离不开高精度地图与定位,这是公认的,无需赘言。而高精度地图标准是需要国家层面来确定的。
为什么要组织国家层面的小组来制定高精度地图的标准?因为高精度地图牵涉国家安全,像高精度地图中的核心数据——如道路曲率——是不能公开的。任何商用的电子地图都加装了偏转插件,偏转至少在2米以上,这就意味着无法L3/L4。解决办法是国家层面控制这个插件,在做L3/L4时还原偏差,但又不能被第三方设备读出。除了偏转插件外,国家统一地图标准,方便车企能够在几个图商之间轻松切换,也便于和国际上的机构或图商沟通交流。
在2018年4月份,在中国汽车工程学会和智能网联汽车联盟(运营实体为国汽智联研究院)的支持下,成立了自动驾驶地图和定位工作组。工作组由学会、协会和联盟指导,清华大学和国汽智联牵头组织,目前成员单位已有86家企业,包括整车企业(一汽、北汽、长安、上汽、广汽、奔驰、大众、蔚来、福特、奥迪、东风商用车、东风汽车、通用、爱驰、PSA、FCA、红旗),零部件企业(博世、大陆、电装、镭神、Velodyne、东软、德赛、亿咖通、经纬恒润、博泰、均胜车联),图商(易图通、百度)、大科技公司(中兴、三星、诺基亚、华为)、初创公司(地平线、初速度、小马智行、驭势)。可以说涵盖了中国汽车工业和智能驾驶产业的绝大部分骨干企业。工作组牵头单位包括清华大学、国汽(北京)智能网联汽车研究院、北京四维图新科技股份、高德软件、武汉中海庭数据技术,清华大学车辆与运载学院院长杨殿阁为组长。
目前进度最快的是《自动驾驶地图采集要素模型与交换格式》标准,由易图通科技(北京)有限公司牵头研制。2020 年 1月8日正式启动,2020年12 月 18 日完成《GB/T 1.1—2020 标准化》初稿,2021年1月18日到2月26日公开征求意见,3月23日正式通过审核成为中国第一个高精地图领域的团体标准,3月底公开。起草单位:易图通科技(北京)有限公司、清华大学、国汽(北京)智能网联汽车研究院有限公司、北京百度网讯科技有限公司、北京四维图新科技股份有限公司、武汉中海庭数据技术有限公司、广东星舆科技有限公司、厦门大学(测绘行业人才大本营)、北京华为数字技术有限公司、北京初速度科技有限公司、中移智行网络科技有限公司。这只是高精地图标准的一部分,全部标准出炉估计要等到2023或2024年。这个团体标准基本就可以看作事实国家标准。
工作组还有一个重要任务就是对接ISO,欧洲的OADF和NDS,以及日本的DMP。
日本有一个类似中国自动驾驶地图和定位工作组的公司,即DMP。在 2013 年,安倍内阁就启动了 SIP(战略性创新创造方案)项目以推动日本高新产业,振兴经济。其中自动驾驶技术(即 SIP-adus)占据了核心地位,日本政府还成立了 SIP自动驾驶推进委员会。2014年日本政府开始筹划制作高精度地图,2015年,该项目开展了自动驾驶的静态数据调研,数据模型基于日本电子地图协会(DRM)的基本款框架,由日本知名图商 Pasco 主导调研。
日本在2016年6月成立了Dynamic Map Planning公司,该公司股东包括日本10大汽车公司,三菱电机和地图开发商Zenrin。其中核心技术源自三菱电机的MMS (Mobile Mapping System)。
日本DMP公司将静态信息模型分成动态、准动态、静态、准静态等若干部分,并且想把这个格式推向全世界。DMP公司是统一做基础静态的,有车厂和行业机构。而动态数据是各个做处理,然后提供给应用厂商。
2017 年 6 月日本政府机构 INCJ 加入并成为第一大股东,持股比例达 33.5%,三菱电机持股 14%,地图开发商 Zenrin 公司持股 12%,地图开发商 PASCO 持股12%,地图发行商为 Aisan Technology 持股 10%,Increment 持股 8%,丰田地图大师持股 8%,其余股份为 10大车厂,每家公司从5%的股份直接减少到0.5%。公司也更名为 Dynamic Map Platform。
DMP采用激光雷达为核心传感器,以高精度激光雷达点云图为原始数据,提供最高质量的3D高精度地图,远非传统2D摄像头地图所能比拟。
2019年2月,DMP收购了背后由通用支持的美国地图技术初创公司Ushr。Ushr是2007年成立的3D地理空间公司GeoDigital派生出来的公司。GeoDigital是一家测绘公司,专门研究公用事业、管道、铁路、林业、基础设施、移动LiDAR、大空间数据等基于位置的工作管理以及其他对企业至关重要的主题地图绘制。
Ushr提供高精地图软件,以帮助自动驾驶车辆安全地导航地图路线。Ushr被认为是第一家为量产车型提供高精地图的公司。通用的2018年凯迪拉克CT6中的Super Cruise,就是使用Ushr的高精地图绘制技术。该技术基于美国公路和较小道路上预先绘制的LiDAR分段路线。Ushr已经绘制了超过200000英里的道路,并且水平精度达15cm。该公司的平台可以解释地图并将其传输给车辆控制系统和动力总成。这是凯迪拉克每次都能在辅助驾驶系统中力压特斯拉成为第一名的主要原因。
2020年3月,丰田的TRI-AD和DMP已同意建立合作伙伴关系,从2020年4月开始应用两家公司的技术来构建PoC。这个概念旨在证明DMP高效率的有效更新。使用TRI-AD的开放软件AMP(Automated Mapping Platform)定义地图,以便根据从车辆传感器收集的图像和其他数据来检测和处理车道级道路要素的变化。
DMP施行4层LDM地图,所谓LDM地图,即本地动态地图,起源自2007年博世的研究。目前LDM已经成为欧洲ETSI 标准中的重要组成ETSI TR 102 863 V1.1.1。我们常说的地图是LDM地图的最底层,V2X实际就是最上层。
底层的地图升级是月级,最上层的V2X是秒级的。
中国在地图工作组成立后,启动了三个方面的课题研究:一个是自动驾驶地图的标准体系,一个是自动驾驶地图政策法规如偏转问题,一个是中国自动驾驶地图的技术路线图。自动驾驶地图工作组已经起草了6项标准。
第一个是自动驾驶高精度地图特征定位数据技术规程。
第二个是自动驾驶地图采集要素模型与交换格式。
第三个是自动驾驶地图动调信息数据交换格式。
第四个是自动驾驶路侧传感器数据交换格式。
第五个是基于卫星地基增强的车辆定位技术要求。
第六个是关于自动驾驶路侧感知定位技术条件的。
这几个标准将列入中国汽车工程学会的标准。中国自动驾驶地图标准除了国汽智联外还有泰伯网参与,泰伯网组织的标准更倾向于比如测绘地图的这种加工制作有关的领域,智能网联汽车联盟的自动驾驶地图工作组,更多地侧向于地图的使用与自动驾驶功能的结合,包括地图交换格式。
中国提出了7层LDM模型。增加了一个决策感知层,车道级路由规划层和定位增强层,比日本的更适合自动驾驶。
第一层:道路级路网层。这一层地图数据主要用于道路级路径规划,提供道路级的全局导航信息。这一层主要包含传统的静态电子地图数据。
第二层:交通信息层。这一层地图数据主要用于动态道路级路径规划。这一层地图数据主要包括道路级动态交通数据,如交通堵塞和道路施工等事件,可用于避免拥堵的动态全局路径规划。
第三层:道路-车道连接层。这一层主要用于车道级路径规划,提供了道路级路网和车道级路网之间的拓扑连接。它能够将道路级路网拓扑映射到车道级路网中。由于不包含每个车道的详细信息,这一层数据体量相对较小,方便进行快速的候选车道级路径搜索。
第四层:车道级路网层。这一层地图数据是为车道级导航而设计的,提供了高精度的车道级几何结构、车道级交通规则、道路标志等车道相关的信息。结合第三层和第四层可以得到综合考虑道路坡度、曲率和交通规则的车道级最优路径。
第五层:地图特征信息层。这一层地图数据用于辅助自动驾驶车辆的环境感知,可用于开发具有自主定位能力的车道级导航。这一层地图存储了高精度的特征数据,以便实现基于地图匹配的定位或感知算法。
第六层:动态感知容器层。这一层地图数据用于局部动态轨迹规划。其存储的数据包括网联车辆或基础设施共享的障碍物动态信息。同时这一层地图也可以看做动态感知信息的容器,提供融合多车传感器信息的标准化接口,如激光雷达、摄像头等。基于这一层的信息,局部轨迹规划可以考虑动态情况以便保证安全。
第七层:智能决策支持层。这一层是为自动驾驶决策过程设计的,它能够提供驾驶决策知识数据库。这一层存储的数据来自于对驾驶员的驾驶决策行为的大量分析和学习。
对于道路级导航,只需使用第一层和第二层的地图数据。对于使用差分卫星定位系统的车道级导航,需要在地图中加入第三层和第四层。在GPS失效的情况下,第五层可以帮助车辆实现自主定位。对于多车协同驾驶场景,需要添加第六层来获取联网车辆共享的信息。对于高级别自动驾驶场景,第七层数据则提供了决策支持信息。
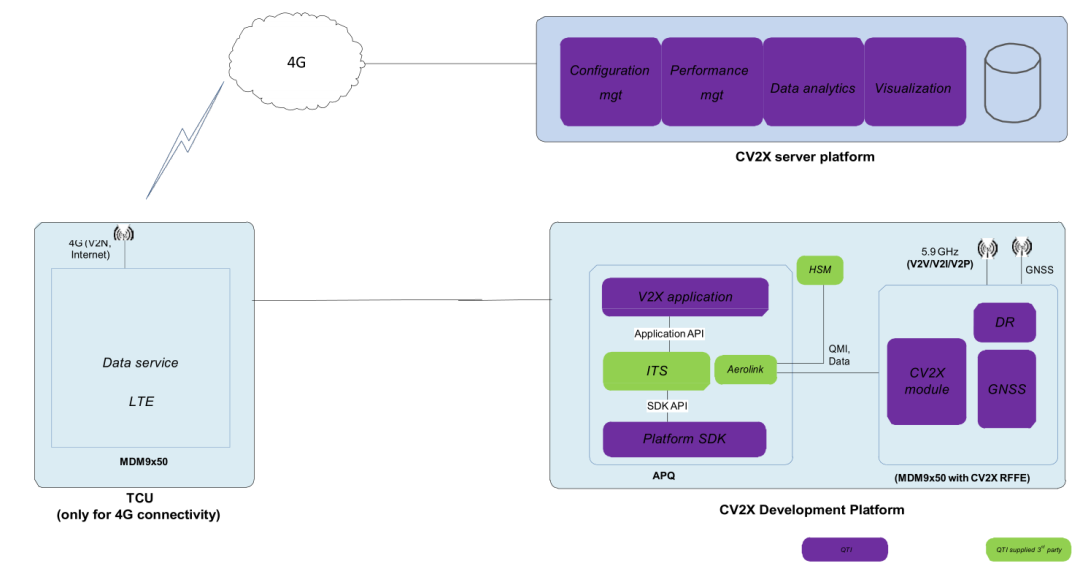
高通C-V2X平台架构。图片来源:高通
上层协议栈或者说ITS协议栈,欧美起步都很早,这主要是欧美从1999年就开始构思了利用无线通讯打造ITS系统的构思并付诸实施。欧洲电信标准协会即ETSI从2008年就开始着手制定ITS协议栈标准,目前已经基本制定完成。不过是基于DSRC的,但转移到C-V2X的速度很快,毕竟只是通讯方式的不同,2020年1月,ETSI发布了ETSI EN 303 613接入层标准,将来还有ETSI TR 101 607标准。美国方面,比欧洲稍晚,大约在2010年开始制定以DSRC为通讯方式的标准,即SAE J3161。2019年则有针对C-V2X的J2945标准。
高通在第二代MDM9250开发平台上提供基于SAE和ETSI标准的ITS协议栈。同时也支持第三方ITS协议栈。对SAE来说,关键的ITS信息包括BSM(Basic Safety Message,即SAE J2735)、Emergency Vehicle Alert (EVA) 、Signal Phase and Timing (SPaT)、Map Data(MAP)、Traveler Information Message (TIM)。对ETSI来说,关键信息包括Decentralized Environmental Notification Message (DENM)、Cooperative Awareness Message (CAM)、Signal Phase and Timing (SPaT)、LDM(本地动态地图)。也就是说V2X的应用标准(数据格式与数据类型、通信方式)被ETSI收录在内了。
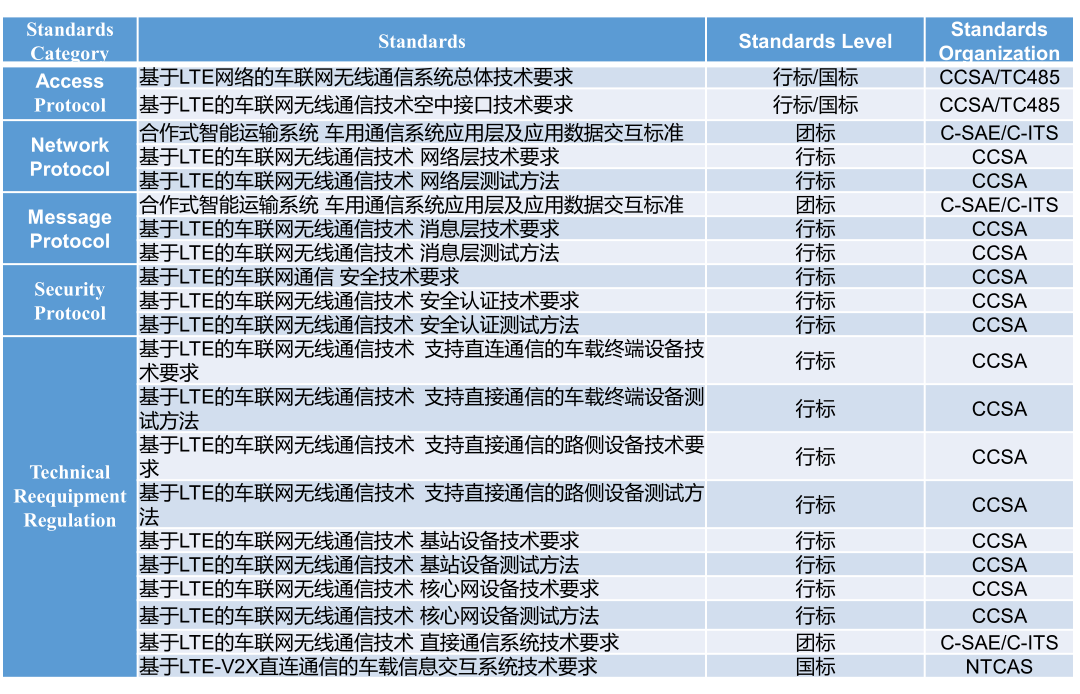
图片来源:公开信息整理
中国目前已经基本完成的标准如上表,主导力量是中国通信标准化协会(CCSA),其余还有中国智能交通产业联盟(C-ITS)、中国汽车工程协会(China-SAE)、国家汽车标准化技术委员会(NTCAS)、车载信息服务产业应用联盟(TIAA)。
原文标题:L3/L4瓶颈——高精度地图何时商用?
文章出处:【微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
- 相关推荐
- 热点推荐
- 自动驾驶
-
L0与L4双机采用SPI DMA循环模式通信过程中,L4接收数据错位了的原因?2024-04-23 385
-
请问TMS320F28335中的CMD高低64K的L0~L3是公用的还是单独的?2018-08-22 1880
-
有具有CMT,MBM,L3 CAT,L3 CDP和MBA的处理器吗2018-11-06 2964
-
什么是高精度地图2023-10-07 3355
-
百度L3事业部利用高精度地图打造自动驾驶汽车2016-12-02 1849
-
百度L3现身聊自动驾驶,谈的都是车联网和高精度地图2016-12-05 2199
-
L3级别自动驾驶车型量产,L4还有多远呢?2018-10-09 18853
-
激光雷达以及强大的神经网络能否代替高精度地图?2019-06-25 4421
-
中寰卫星总监谈奥迪关闭自动驾驶L3研发2020-03-20 2990
-
自动驾驶l3和l4的区别_自动驾驶需求分析2020-08-27 11462
-
国内首个L3级自动驾驶之城诞生,高精定位和高精地图成为关键支撑2022-08-11 1548
-
当春节驾车返乡拥有了L3/L4级自动驾驶2024-10-29 1395
-
今日看点丨英特尔大规模裁员4000人!;华为重磅发布L3/L4落地时间表 1. 华为重磅发布L3/L4落地时间表:预计2025-07-14 1895
-
华为定下自动驾驶时间表 2026年实现高速L3规模商用2025-09-30 2789
-
导远科技高精度定位解决方案赋能首批L3级自动驾驶车型2026-01-12 770
全部0条评论

快来发表一下你的评论吧 !
