

BOSCH为代表CIA阵营提出新标准CAN XL
描述
CAN协议发展历史:
| 1988: | Bosch发表CAN 1.1规范 |
| 1990: | Bosch发表CAN 2.0 A/B规范 |
| 1993: | ISO 11898 标准(第一代),经典CAN协议 |
| 2015: | ISO 11898-1 标准(第二代),包含CAN FD协议 |
| 2020: | 年3月中旬在德国巴登-巴登举行的国际CAN大会(iCC)上正式推出 |
| 2021: | CiA 610-1规范(第三代),CAN XL协议 |
在过去20年中,车载网络的竞争异常激烈。在大多数汽车中,车身控制系统和发动机管理被CAN以500Kbps的速率接管,底盘控制、发动机管理、车身控制被CAN FD和FlexRay以1~10Mbps之间的传输速率接管,车载娱乐系统被速率在25~150Mbps之间的MOST总线接管。随着时间的洗礼,由于FlexRay和MOST的应用领域被车载以太网囊括,因此FlexRay和MOST很有可能被替换掉,只留下CAN和Ethernet。
超过90%的汽车通信需要低于10Mbps的数据速率,因此10Mbps的通信速率将覆盖广泛的汽车应用领域,例如雷达、超声波传感器、底盘控制等。面对以上场景,以太网阵营率先做出响应,IEEE标准化了一个适用于汽车的10Mbps以太网版本(10BASE-T1S),并于2019年上市。面对以太网阵营的强劲输出,CAN阵营当然不甘示弱。以BOSCH为代表CIA阵营提出了一个新的标准——CAN XL。
作为CAN家族的新成员,CAN XL 完成了它的最高使命。在一定程度遵循相同原理的情况下完成了对CAN FD的扩展。
首先,在传输速率上,新成员CAN XL在仲裁场的速率为500kbps~1Mbps,在数据场的速率可以提升到2Mbps~10Mbps。相较于CAN FD的速率可切换,新成员CAN XL将强制进行速率切换。
再者,相较于CAN总线29位标识符ID,本次迭代CAN XL仅支持11位的标识符,其数据帧中有两个级联CRC字段(循环冗余校验),使其能够检测数据帧中5个随机分布的位错误。CAN XL 的亮眼之处在于其单帧报文的荷载提高到2048 Byte(例如IP(Internet协议),甚至可以传输完整的以太网帧),保证高层协议可以跑在网络上,并且向下兼容CAN/CAN FD。
除此之外,CAN XL总线访问仍采用CSMA/CD,(载波侦听多路访问/冲突解决方案),访问权限方面,按照优先级允许消息传输。
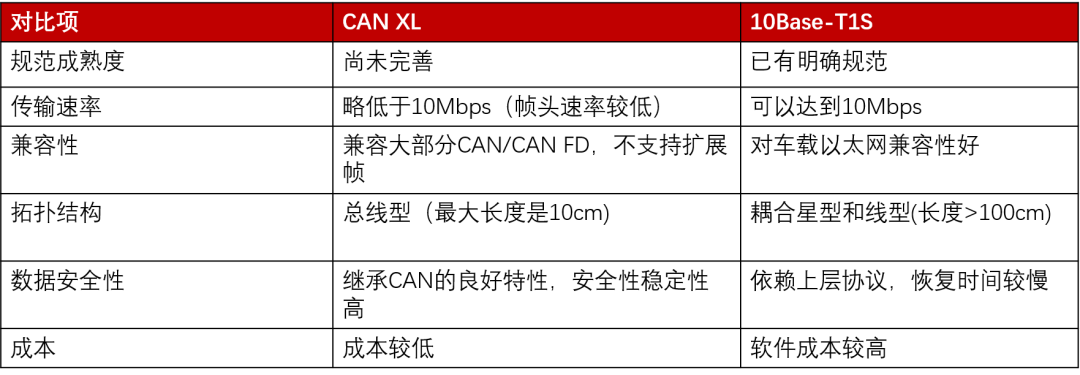
10base-T1S同样使用10Mbps的传输速率,对于这两种都能达到10Mbps的技术,本质上两种技术完全不同。在这里我们就对二者做一下简单的对比:
原文标题:预热调研:CAN家族新成员——CAN XL
文章出处:【微信公众号:是德科技KEYSIGHT】欢迎添加关注!文章转载请注明出处。
-
BOSCH_CAN_V20_cn2012-08-19 3123
-
Bosch首次提出将can总线技术应用在民用汽车领域2018-12-27 3154
-
CAN总线的相关介绍2021-08-19 2560
-
CiA 简介2010-06-25 1744
-
对垒以太网10BASE-T1S,CAN XL能后来居上么?--CAN XL技术解读2022-08-01 3064
-
新闻资讯 | 同星智能正式加入CiA(CAN in Automation)2023-04-09 1886
-
速率达20MB/s!瑞典克萨在CAN XL Plugfest中实现突破2023-07-10 1090
-
Arasan发布无缝集成CANsec加速器IP的CAN-XL IP2023-08-04 1894
-
虹科受邀参与CiA线上2023中国技术日2023-09-13 1511
-
第三代CAN总线CAN-XL解析2023-10-18 5178
-
CAN总线的发展历程 CAN XL总线的典型应用2023-12-21 6478
-
虹科培训 | CiA协会CAN总线实训开班,新一代CAN网络CAN XL2024-05-16 1227
-
6月13日开班:CiA亲授CAN XL实训,三人团报立享8折2024-06-06 1073
-
一文读懂CAN XL!万字干货,虹科CAN XL研讨会问答,你想知道的都在这里!2024-11-18 1856
-
CAN XL中国路演第一站丨虹科携手CiA共创技术盛宴!2025-11-19 1524
全部0条评论

快来发表一下你的评论吧 !
