

无线定位技术的实现及在CDMA系统中应用研究
描述
定位技术的应用及分类
近年来,随着用户需求的增加,无线定位技术受到越来越多的关注,推动了对无线定位技术的研究及测距技术的发展。如何尽可能地利用现存网络资源,低成本地实现对用户的精确定位一直是研究的焦点。总的来说,实现无线定位主要有两大类解决方案,第一类是由移动站(MS)主导的定位技术。单从技术角度讲,这种技术更容易提供比较精确的用户定位信息,它可以利用现有的一些定位系统,例如,在移动站中集成GPS接收机,从而利用现成的GPS信号实现对用户的精确定位。但这类技术需要在移动站上增加新的硬件,这将对移动站的尺寸和成本带来不利的影响。第二类是由基站(BS)主导的定位技术,这种解决方案需要对现存的基站、交换中心作出某种程度的改进,但它可以兼容现有的终端设备。其可选用的具体实现技术主要包括:测量信号方向(信号的到达角度,简称AOA)的定位技术、测量信号功率的定位技术、测量信号传播时间特性(到达时间,简称TOA;到达时间差,简称TDOA)的定位技术。为了提高定位的精度,也可以采用利用采用上面数种技术的组合。由于第二类的解决方案能更好的利用现有的网络及其终端设备,因而具有更广泛的应用前景,所以本文将以它作为讨论的主要内容。
测量接收信号功率的定位技术
依据接收到的无线信号的功率是来实现无线定位的一种常用的方法。通过测量基站(BS)收到的来自移动站(MS)的信号功率,以及它们之间无线信道的传输模型,可以估计出移动站到基站的大致距离为d。这样对一个基站BS(i)来讲,移动站必处于以BS(i)为圆心,d为半径的圆上。当采用三个或三个以上的基站对同一个移动站进行测距时,即可以测得该移动站的所在位置。
在这种方法中,无线信号传输过程中的多径效应和通过障碍时产生的阴影效应是产生定位误差的主要原因。在信号的传输方向上,多径效应有时会使在相距仅0.5个波长的两点上信号强度相差30~40dB左右。为了克服多径效应对测距的影响,对高速移动中的无线用户可以通过求得其信号功率的平均值来提高定位的准确性,但对于缓慢移动甚至静止的无线用户有效的功率平均值是很难测得的。阴影效应是产生定位误差的另一个主要原因,克服阴影效应的最主要的方法是预先测量每个基站周围的信号功率损耗等高线。
在实际应用的CDMA系统中,为了减小近距离用户对远距用户的干扰,必须要采用功率控制技术,在一些TDMA系统中,为了减小移动站(MS)的功耗也应用了功率控制。在这样的采用功率控制的蜂窝系统中,要实现用测量信号功率为基础的定位技术,移动站必须以足够高的精度告知基站其发射信号的功率,基站再由接收到的信号功率计算出信号传输过程中的损耗,进而推算出移动站到基站的距离估值,实现对无线用户的定位。
测量接收信号方向(AOA)的定位术
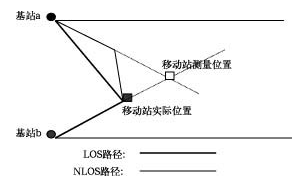
测量信号的到达角度(Angle Of Arr技ive,简称AOA)也是一种在蜂窝网中常用的定位技术。这种方法需要在基站采用专门的天线阵列来测量特定信号的来源方向。对于一个基站来讲,AOA测量可以得出特定移动站所在方向,当两个基站同时测量同一移动站所发出的信号时,两个基站各自测量AOA所得的方向直线的焦点就是移动站所在的位置。尽管这种定位方法的原理非常简单,但在实际的应用中存在一些难以克服的缺点。首先,AOA定位要求被测量的移动站与参与测量的所有基站之间,射频信号是视线传输(LOS)的。非视线传输(NLOS)将会给AOA定位带来不可预测的误差,参见图1。
即使是在以LOS传输为主的情况下,射频信号的多径效应依然会干扰AOA的测量。其次,由于天线设备角分辨率的限制,AOA的测量精度是随着基站与移动站之间的距离的增加而不断减小的。
由于测量AOA的定位方法具有上述的特点,所以对于处于城市地区的微小区来讲,引起射频信号反射的障碍物多且其到移动站的距离与小区半径可以相比,这样就会引起比较大的角测量误差。在这种情况下,基于AOA的定位方法没有实际的意义。对于宏小区,因为其基站一般处于比较高的位置,与小区的半径相比,引起射频信号反射的障碍物多位于移动站附近,NLOS传输引起的角测量误差比较小。所以测量信号到达角度的定位方法多用于宏小区,或者与其他定位技术混合使用来提高定位的精度。
测量信号传播时间特性的定位技术
最后一类主要的定位技术是通过测量基站到移动站之间射频信号传输时间特性来实现的。这类定位技术实现起来比较容易,与AOA相比较,在同等条件下(参与定位的基站数目相同)能够提供更高的定位精度,因而在实际中应用得最广泛。它主要有两种具体的实现手段。第一种是测量信号到达时间(TOA),即由基站向移动站发出特定的测距命令或指令信号,并要求移动站对该指令进行响应。基站会纪录下由发出测距指令到收到移动站确认信号所花费的时间T,该时间主要由射频信号在环路上的传播时延、移动站的响应时延和处理时延、基站的处理时延组成。如果能够准确地得到移动站和基站的响应和处理时延,就可以算出射频信号的环路传播时延Td。因为无线电波在空气中以光速c传播,所以基站与移动站之间的距离估值dm=c*Td/2。当有三个基站参与测量时,就可以根据三角定位法来确定移动站所在的区域,如图2所示。

由于这种定位方法是以时间为基准的,多径效应和非视线传输(NLOS)所带来的传输时延增加是产生测距和定位误差的主要原因,所以在实际的系统中,测距结果dm一般都要大于基站与移动站之间的实际距离d。为了克服NLOS以及多径效应带来的不利影响,提高定位精度,参与同次定位的基站数目N一般都要大于3,这样可以缩小图2中阴影区域的面积。另外对于每次测量的结果都要应用一些定位算法,使定位估计值在某种准则下达到误差最小。例如,T是每个基站测得的TOA,i为参与测量的基站编号,在某坐标系下,移动站的位置估计是(x,y),基站i的位置是(xi,yi)。以函数fi=c*Ti-作为基站BS测距的性能测度,也就是基站BS的测距误差。在理想状态下,即当(x,y)是移动站的实际位置,并且移动站到每一个基站无线信号都是视线传输(LOS)的,那么对每一个参与测量的基站来讲,fi应该为零。但在实际中,由于受到NLOS传输和多径效应的影响,一般不可能求得(x,y)使fi=0(i=1,2,。..,N)都成立。所以整个定位系统来讲,可以用参与定位的基站的测距误差的加权平方和F作为系统性能测度函数,并以使F最小的(x,y)作为一次定位测量的结果。式中ai是基站BS在测量结果中的加权系数,其大小反映了BS到MS测距的精确性和可信程度。
另一种基于信号传输时间特性的定位方法是测量不同基站接收到同一移动站的定位信号的时间差(TDOA),并由此计算出移动站到不同基站的距离差。移动站到任何两个基站的距离差d可以在两个基站之间给出一条双曲线,移动站一定处于该曲线之上。当同时有N个基站参与测距时(N≥3),由多个双曲线之间的交汇区域就是对用户位置的估计,如图3所示。这种方法要求所有参与测量的基站的时钟是严格同步的。与TOA相比,它的主要好处是不需要精确地求得基站和移动站的响应和处理时延。与TOA一样,TDOA的定位误差也是主要来自射频信号的非视线传输和多径效应。解决这一问题的主要途径也是通过增加参与定位的基站数目和采用高精度的估计算法。
结束语
本文主要介绍了数种利用现有蜂窝系统中向用户提供定位服务的基本方法,这些方法不需要改动现有的移动通信终端,但它们都需要对现有的网络设备做出某种程度的改进。在实际的系统中,可以根据用户对定位精度的要求、无线传输的环境、成本的变化来选用一种或几种技术的组合来实现对用户的定位。一般说来,TOA/TDOA能够提供比较高的定位精度,并且也较容易实现,因而应用较为广泛,现存的CDMA系统多采用这种方法。
责任编辑:gt
-
ZigBee技术在矿灯监控中的应用研究2013-03-15 3347
-
改进的D-S理论在ETC系统中的应用研究是什么?2021-05-14 1442
-
怎么实现基于CDMA技术的准确寻址?2021-05-27 2029
-
Holon技术在敏捷制造系统中的应用研究2009-03-16 508
-
CDMA网络中TSOA/AOA定位跟踪技术2009-03-20 966
-
基于CDMA技术的无线监控系统的研究与应2009-08-24 1045
-
CDMA移动定位技术及基于WAP应用2009-09-24 694
-
OFDM系统中DAGC的应用研究及FPGA实现2009-12-30 590
-
基于CDMA网络的移动终端定位技术2011-10-10 1732
-
ZigBee和GPRS技术在水文监测系统中的应用研究2017-01-08 1007
-
基于UWB无线通信技术在矿井中的应用研究2020-11-18 1472
-
Petri网在计费系统中的应用研究_侯煜2017-03-19 1150
-
电气监控系统中的无线技术应用研究2018-02-12 969
-
人车定位技术在电厂应用研究2023-01-13 1328
-
RFID技术在供应链管理中的应用研究2023-10-09 763
全部0条评论

快来发表一下你的评论吧 !
