

基于P89C668单片机和SJA1000控制器实现节点接口电路的设计
描述
CAN(Controller Area Network)总线,又称控制器局域网,属于现场总线的范畴,是一种有效支持分布式控制或实时控制的串行通信网络。与其它几种现场总线相比,CAN 总线是最容易实现、价格也最为低廉。由于其性能好,可靠性高、设计灵活,现已广泛应用于工业现场控制、智能大厦、小区防范、交通工具、医疗仪器、环境监控等众多领域。
CAN总线规范已被国际标准化组织(ISO)定为国际标准,CAN协议也是建立在国际标准化组织的开放系统互连参考模型(OSI)基础上的.CAN总线主要工作在数据链路层和物理层,用户可在其基础上开发适合系统实际需要的应用层通信协议,由于CAN总线的可靠性高,使应用层通信协议得以大大简化。目前市场上有多种不同型号的CAN控制器,它们实现CAN协议部分电路的结构和功能大多相同,只是与单片机接口部分的结构和方式有一些差异。
为了提高硬件电路的效率,简化电路设计上的复杂性,保证电路的电气兼容性,本文采用PHILIPS公司生产的P89C668单片机和CAN控制器SJA1000设计了CAN接口节点电路,并介绍了相关的软件设计。
1 CAN总线节点接口硬件电路设计
CAN节点接口硬件电路原理如图1所示。采用PHILIPS公司生产的P89C668单片机、CAN控制器SJA1000和CAN总线收发器PCA82C250设计接口电路来实现CAN总线通信。

图1 CAN总线接点接口硬件电路原理
P89C668单片机内带64kB Flash存储器,该存储器既可并行编程,在系统编程ISP中也可串行编程,在实际的成型产品中可通过ISP升级用户程序。 在Boot ROM程序中,可通过一个默认的串行下载器(UART)对Flash存储器作ISP编程,而在Flash代码区中并不需要调用下载器的代码,用户程序可通过调用在Boot ROM中的标准子程序对Flash存储器擦除和再编程(即IAP)。
P89C688在6个时钟周期内执行一条指令,一个OTP位让用户可选择传统的12个时钟周期.P89C688用先进CMOS工艺制造,是80C51单片机家族的衍生品,其指令集和80C51相同。该单片机有四个8位I/O口,三个16位定时器/事件计数器,多中断源,四个优先级,可嵌套中断结构,一个增强型UART和片内振荡器以及时序电路.P89C668新增特性使其成为一个功能强大的单片机,可为某些应用提供PWM、高速的I/O和加/减计数。
SJA1000 是PHILIPS 公司生产的独立CAN 通信控制器,它既支持CAN2.0A,又支持CAN2.0B,与PCA82C200 CAN 控制器兼容(BasicCAN),并可替代PCA82C200;增加了一种新的工作模式PeliCAN,使其支持具有很多新特性的CAN2.0B 协议;集成了CAN 协议的物理层和数据链路层功能,可完成对通信数据的成帧处理;具有多主结构、总线访问优先权、硬件滤波等特点。
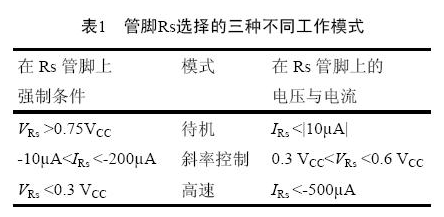
PC82C250为CAN总线收发器,是CAN 控制器和物理总线的接口,提供对总线的驱动发送能力、对CAN控制器的差动发送能力和对CAN控制器的差动接收能力。它具有很强的抗瞬间干扰和保护总线的能力,以及三种不同的工作方式即高速、斜率控制和待机,如表1所示。总线上的某一个节点掉电不会影响总线,在40米内应用的速度可达1M baud,最多可挂110个节点。
从图1 可看出,该硬件电路主要由单片机P89C668、CAN 独立控制器SJA1000 和CAN 收发器PCA82C250 组成。
单片机P89C668 负责对SJA1000 进行初始化,通过控制SJA1000实现数据的发送与接收等通信任务。
SJA1000 的AD0“AD7连接到P89C668 的P0口;
CS连接到P89C668的P1.1,P1.1 为0 时选中SJA1000,可控制SJA1000;
SJA1000 的RD/E、WR、ALE/AS 分别连接到P89C668 的RD(P3.7)、WR(P3.6)、P1.0;
SJA1000的(INT)连接到P89C668 的P3.2(INT0),这样,P89C668 可以通过中断方式访问SJA1000;
SJA1000的模式选择引脚MODE 接高电平时选择Intel 模式;
为了保证时钟同步,SJA1000 的CLKOUT 引脚使能,向P89C668 提供时钟源。
2 CAN 总线节点接口软件设计
实现CAN 总线通信,要对CAN 总线节点接口设计相应的总线通信程序;在总线通信之前,必须进行SJA1000 控制器初始化。在上电或复位后,单片机通过运行其自身复位程序初始化SJA1000.CAN总线通信程序大致由SJA1000 初始化、发送和接收三部分组成。以下分别对他们进行简单的描述。
2.1 SJA1000 初始化
在上电后,CAN 控制器的RST 脚获得一个复位脉冲,使之进入复位模式。在开始对SJA1000 各个配置寄存器进行设定之前,主控制器通过读复位/请求标识来检测SJA1000是否进入复位模式。为了避免微控制器的上电复位时间和SJA1000 的复位时间的偏差,微控制器要等待SJA1000 完成上电复位后才能对SJA1000 配置寄存器进行配置,存有配置信息的寄存器只能在复位模式下才可进行写入.SJA1000 初始化程序在复位模式下,主控制器要配置下面的寄存器:
(1)模式寄存器(仅在PeliCAN 模式下选择应用操作模式)
接收过滤模式
自检测模式
侦听模式
(2)时钟分频寄存器
使用BasicCAN 或PeliCAN 模式
CLKOUT 引脚是否可以使用
CAN 输入比较器是否被跳过
TX1 输出是否专门用于接收中断输出
(3)总线定时寄存器
定义总线的位速率
定义位周期内的采样点位采样点
定义一个位周期的采样数量
(4)接收代码和接收掩码寄存器
定义要接收消息的接收代码
定义与接收代码相关位进行比较的接收掩码
(5)输出控制寄存器
定义CAN 总线输出引脚TX0 和TX1 的配置
在将这些配置信息配置到SJA1000配置寄存器后,通过消除复位模式,请求使SJA1000进入操作模式。一定要确保复位标志真的被删除,并且在没有进行CAN 总线通信前进入操作模式,这可以通过读该标志来实现。 当硬件复位处于挂起状态,即CAN 控制器的RST 引脚为低电平时,复位模式/请求标志不能被清除。
下面是SJA1000 的初始化程序。
CAN_INI: MOV DPTR, #MOD; 模式寄存器
MOV A, #01H
MOVX @DPTR, A
NOP
MOVX A, @DPTR
ANL A, #01H
JZ CAN_INI; 等待SJA1000 进入复位模式
MOV DPTR, #BTR0; 总线定时0
MOV A, #BandRate0
MOV DPTR, #BTR1; 总线定时1
MOV A, # BandRate1
MOV DPTR, #OCR; 输出控制寄存器
MOV A, #1AH
MOVX @DPTR, A
MOV DPTR, #CDR; 时钟分频器
MOV A, #0C0H
MOV DPTR, #ACR0; 接收代码寄存器ACR0
MOV A, #ModuleAddress; 设置为模块的地址
MOVX @DPTR, A
INC DPTR
MOV A, #0FFH
MOV @DPTR, A
INC DPTR
MOV A, #0FFH
MOVX @DPTR, A
INC DPTR
MOV A, #0FFH
MOVX @DPTR, A
MOV DPTR, #AMF0; 接收掩码寄存器AMF0
MOV A, #0FFH; 接收代码设置为
0X0FFFFFFFF
MOVX @DPTR, A
INC DPTR
MOV A, #0FFH
MOVX @DPTR, A
INC DPTR
MOV A, #0FFH
MOVX @DPTR, A
INC DPTR
MOV A, #0FFH
MOVX @DPTR, A
MOV DPTR, #IER ; 中断使能寄存器IER
MOV A, #09H; 允许接收中断和数据溢出中断
MOV DPTR, #CMR; 命令寄存器
MOV A, #04H; 释放接收缓冲器
MOVX @DPTR, A
LOOP: MOV DPTR, #MOD
MOV A, #08H; 设置SJA1000 工作模式为普通模式,单滤波接收
MOVX @DPTR, A
MOV DPTR, #MOD
MOV A, @DPTR
ANL A, #01H
JNZ LOOP; 等待复位标识被清除
RET
2.2 CAN 总线发送程序
对SJA1000控制器进行初始化建立CAN总线通信后,就可以通过CAN总线发送和接收报文。发送程序负责节点的报文发送。发送报文时,用户只需将需要发送的数据按一定的格式组合成一帧的报文,并送入SJA1000发送缓存区中,然后启动SJA1000发送即可。发送程序分发送数据帧和远程帧两种。通过设置RTR以决定是发送数据帧还是远程帧。
SJA1000的报文主要有中断控制和查询两种发送方式。主动发送报文建议采用查询方式,一次发送不成功,可再次发送,这样发送程序的处理比较简单,可采用查询SJA1000控制部分状态标识符的方法。下面给出以查询方式发送报文的发送程序。
CAN_SEND: MOV DPTR, #SR; 状态寄存器SR
MOVX A, @DPTR;
ANL A, #04H
JZ CAN_SEND; 等待发送寄存器释放
MOV R7, #0AH
MOV R0, #TXB_Data; 待发送数据的首地址
MOV DPTR, #TXB_Addr; 发送寄存器的基地址
LOOP1: MOV A, @R0; 将数据写入发送寄存器
MOVX @DPTR, A
INC DPTR
INC R0
DJNZ R7, LOOP1
MOV DPTR, #CMR; 命令寄存器
MO A, #01H; 发送请求命令
MOVX @DPTR, A
RET
2.3 CAN总线接收程序
SJA1000 根据规则自动接收消息,接收到的消息放入接收缓冲器,同时接收缓冲器状态标志位RBS 置为1,接收程序根据RBS 值来决定接收报文与否.SJA1000 报文的接收也有两种方式:中断和查询。对通信的实时性要求不高时,可采用查询方式,否则采用中断方式。以下给出中断接收方式程序。
CAN_INT: CLR EA; 关所有中断
MOV DPTR, #IER; 中断寄存器IER 使能
MOVX A, @DPTR
MOV R6, A; 保存SJA1000 中断允
MOV A, #00H ; 重设SJA1000 中断允许模式为不允许任何中断
MOVX @DPTR, A
LCALL RECEIVE; 接收信息
JZ ReceivOk; 接收到的信息正确则跳转,否则进行错误处理。. 。.; 错误处理
ReceivOk: MOV DPTR, #IER
MOV A, R6; 恢复SJA1000 中断允许模式
MOVX @DPTR, A
SETB EA; 开放中断
RETI
RECEIVE: CLR A
MOV DPTR, #SR; 状态寄存器SR
JZ ERROR; 不是正常的消息接收中断则跳转
LOOP2: MOV DPTR, #RXB_Addr; 接收寄存器的基地址
MOV R1, #RXB_Data; 存放所接收数据的首地址
MOV R7, #0AH
LOOP3: MOVX A, @DPTR; 接收数据
MOV @R1, A; 保存数据
INC DPTR
INC R1
DJNZ R7, LOOP3
MOV DPTR, #CMR; 命令寄存器
MOV A, #0X04; 释放接收缓冲器
MOVX @DPTR, A
MOV DPTR, #SR
MOVX A, @DPTR
CJNE A, #01H, LOOP2; 等待接收队列为空
MOVD PTR, #IR; 中断寄存器IR
MOVX A, @DPTR; 清空SJA1000 的接收中断标识位
CLR A; 返回值ACC=0,表示接收消息正确
LJMP END_RECEIVE
ERROR: 。. 。.; 接收消息错误处理
MOVA, #01H; 返回值ACC=1,表示接收消息不正确
NED_RECEIVE: RET
3 结语
以上介绍了P89C668单片机及其与CAN控制器SJA1000之间的接口方法,并给出了SJA1000在PeliCAN模式下的SJA1000初始化程序、发送程序和接收程序。可在此基础上实现更复杂的CAN总线通信处理,如报警处理、错误处理等。
责任编辑:gt
-
SJA1000独立CAN控制器英文资料2023-10-13 533
-
基于SJA1000的完整CAN节点设计2021-06-18 10301
-
基于FPGA的VHDL语言设计控制器SJA1000的IP软核设计2020-04-12 3775
-
基于多P89C668单片机的组合逻辑电路自动测试诊断系统设计2019-07-01 1725
-
C8051F020型单片机与SJA1000型控制器接口电路2019-06-14 2087
-
采用P89C668单片机实现CAN总线接口设计2019-05-06 1859
-
DSP与CAN控制器SJA1000的总线接口的差别2017-10-30 2384
-
基于P89C668单片机的智能定硫仪系统设计栗红生2017-03-17 743
-
SJA1000 独立的CAN 控制器应用指南2016-05-06 1239
-
CAN控制器SJA1000片选基址怎么确定?2015-07-03 5789
-
SJA1000控制器在多电机综合保护器中的应用2010-12-08 851
-
SHARC DSP与SJA1000的CAN总线接口设计2009-09-27 1671
-
SJA1000 在CAN 总线系统节点的应用2009-05-13 1118
-
CAN控制器SJA1000及其应用2008-10-03 7767
全部0条评论

快来发表一下你的评论吧 !
