

新型人工肌肉:模仿舌头与象鼻,伸缩弯扭全都行
电子说
描述
上海交通大学机器人所研究团队模仿人舌、象鼻等生物组织中的“静水压骨骼肌”,设计制造了一类气动人工肌肉,可以实现伸长、弯曲、螺旋、缩短、扭转等多种运动模态以及它们的组合,并提出了这种人工肌肉的快速设计和制造方法。
相关成果发表于《国家科学评论》(National Science Review, NSR),上海交通大学博士后邹江为第一作者,上海交通大学朱向阳教授和谷国迎教授为论文的通讯作者,论文合作者还包括美国麻省理工学院方绚莱教授。
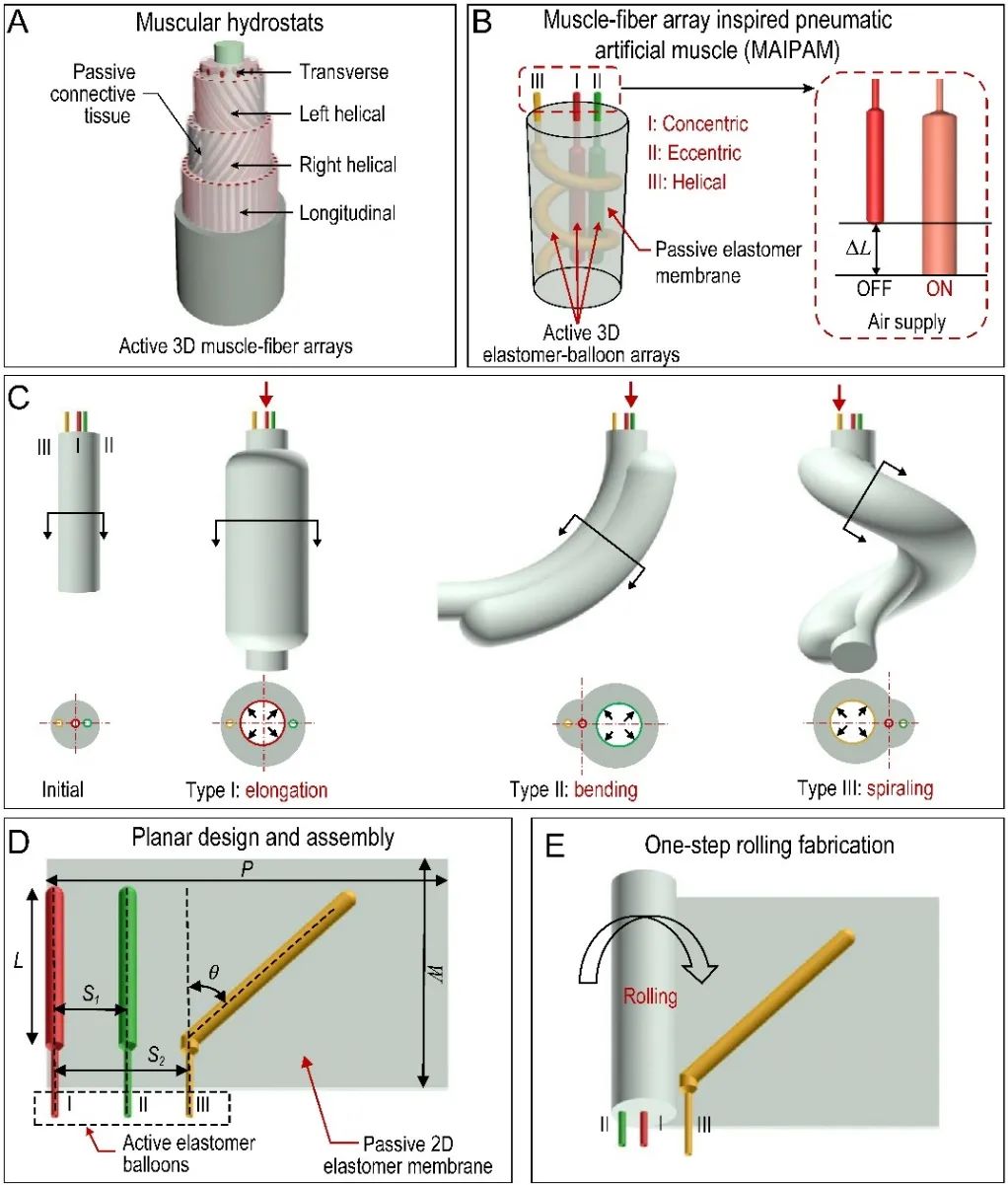
多模态气动人工肌肉的工作原理及设计、制造方法
人工肌肉是软体机器人的关键核心技术。然而,由于缺乏简单有效的设计与制造方法,现有的人工肌肉通常只能产生单一的运动模态,多模态人工肌肉的自动化设计与快速制造一直是该领域研究的难点。
在象鼻、人舌、章鱼触手等生物组织中,存在“静水压骨骼肌”,它可以选择性驱动不同的主动肌纤维阵列,从而产生不同的驱动模态,包括伸长、缩短、弯曲和扭转等,赋予了生物组织无与伦比的灵巧性。
以此为灵感,研究团队提出了一类仿肌纤维阵列的多模态气动人工肌肉。该人工肌肉主要由主动弹性体气球阵列和被动弹性体薄膜组成,通过选择性驱动不同方向的主动弹性体气球,可以产生伸长、弯曲、螺旋、缩短、扭转等不同的运动模态以及它们的组合,比如并联的伸长-弯曲-螺旋运动、并联的10个弯曲运动、串联的伸长-弯曲-螺旋运动等。
研究者提出了一种平面设计和卷曲成型相结合的方法,实现了人工肌肉三维结构的快速制造。这种制造方法还赋予了人工肌肉很强的可扩展性,比如,可集成不可拉伸的限制层以实现缩短或扭转运动,也可组装柔性电极以实现自传感功能。
实验结果表明,该多模态气动人工肌肉在软体机器人中具有广泛的应用前景,如环境探测、抓取或操作物体、管道爬行等。
编辑:jq
-
基于气动人工肌肉的双足机器人关节设计方案2012-12-06 4512
-
气动人工肌肉运动位移测量系统设计攻略,总结的太棒了2021-04-15 1726
-
基于虚拟仪器的气动人工肌肉运动位移测量系统的实现2009-12-14 1323
-
升级打怪不停歇 2016年百度秀人工智能“肌肉”2016-12-02 879
-
软体机器人秒变“大力士”,新型人工肌肉可提千倍重量的物体2017-12-01 2276
-
在LabVIEW平台上进行气动人工肌肉运动位移测量系统的软硬件设计2018-11-29 4111
-
MIT“人造肌肉”——两种普通的材料,结合在一起却能爆发出惊人的力量2019-07-15 8201
-
科技 | 新型人工肌肉收缩力达人体肌肉40倍2019-07-16 6180
-
哈工大新型仿象鼻柔性机器人 能自由伸缩2020-03-27 3564
-
传感器都运用到舌头上啦2020-09-22 3160
-
哈工大在人工肌肉领域获得重大突破2021-02-01 2633
-
一种离子液体填充纳米纤维鞘层的电化学人工肌肉纤维2021-03-26 4334
-
基于躯干肌肉活动监测的手部行为识别方法2021-06-17 908
全部0条评论

快来发表一下你的评论吧 !
