

桥式起重机电气工作原理及故障维修方法
电子说
描述
桥式起重机是在码头、货场、仓库、车间等地方广泛使用的起重机械,它主要由桥架(即大车)、大车移行机构、滑线、装有提升机构的起重小车、驾驶室等部分组成。如图1所示。
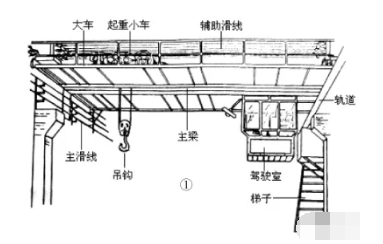
桥式起重机的基本运动形式有3种:1)起重机由大车驱动沿车间两边的轨道作纵向前后运动;2)小车及提升机构由小车电动机驱动沿桥架上的轨道作横向左右运动;3)升降重物时由起重电动机驱动吊钩作垂直上下运动。
桥式起重机按照起重量的大小分为小型、中型和重型3个等级,其中起重量在5~10t之间的的为小型起重机,起重量在15~50t之间的为中型起重机,起重量在50t以上的为重型起重机。小型起重机只有一个吊钩;15t以上的中型和重型起重机有主、副2个吊钩。2个吊钩的起重机,其起重量可用一个分数标注其起重量,例如,起重量标注为“15/3t”的起重机,分子“15”表示主钩起重量为15t,分母“3”表示副钩起重量为3t。
图1所示的起重机只有一个吊钩,属于小型起重机。本文对小型起重机的电气原理以及故障维修给以介绍。
一、桥式起重机对电力拖动的要求1.起重电动机为重复短时工作制,电动机经常处于启动、制动和反转状态,而且负载不规律,时轻时重,因此要求电动机有较强的过载能力。2.具有一定的调速范围,普通起重机高速和低速的调速比一般为3:1,要求较高的则能达到(5~10):1。3.桥式起重机的大车运行如果采用集中驱动,则为一台大车电动机;如果采用分别驱动,则由两台相同的电动机分别驱动左右两边的主动轮。4.为了确保安全,提升电动机应设有机械抱闸,并配有电气制动。5.由于起重机的应用很广泛,所以其电气控制设备都已标准化。小型桥式起重机常采用凸轮控制器直接去控制电动机的启动、停止、正反转、调速和制动。6.空钩应能够快速升降,以减少辅助工时;轻载时的提升速度应大于额定负载时的提升速度。7.刚开始提升重物或重物下降至接近预定位置时,应能低速运行,同时要求由高速向低速过渡时应逐级减速以保持运行稳定。8.起重电动机的负载特点是负载转矩的方向并不随电动机的转向而改变,因此要求在下放重物时起重电动机可以工作在电动机状态、反接制动状态或再生发电制动状态,以满足对不同下降速度的要求。9.要有完备的电气保护与连锁环节。对于短时的过载保护,由于热继电器的热惯性较大,因此起重机多采用过流继电器做过载保护。要有失压保护。在6个运行方向上,除了向下运行以外,其余5个方向均要求有行程开关作限位保护。二、小型桥式起重机的电气工作原理
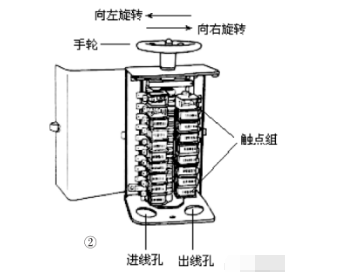
小型桥式起重机一般使用4台电动机驱动,包括一台吊钩电动机,一台小车电动机和两台大车电动机。根据起重装置的技术特点,通常4台电动机均使用绕线转子型异步电动机。考虑到经济技术上的合理性要求,小型桥式起重机使用的电动机选用凸轮控制器对其启动、调速、正反转进行控制。凸轮控制器的型号规格很多,图2是KT12-25J系列凸轮控制器的外形结构。
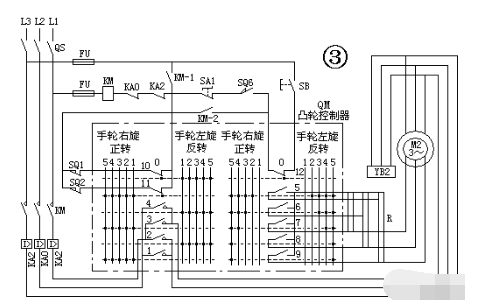
1.小车控制电路小型桥式起重机的小车与吊钩的控制电路几乎相同,现以小车电气控制电路为例介绍其工作原理。相关电路见图3。使用凸轮控制器QM(图3中将凸轮控制器标记为QM)可以控制绕线转子型电动机的正反转,以及转子绕组上串联电阻的切除,它的手轮可向左、向右旋转,以实现对电动机的正转或反转控制。每种旋转方向各有5挡,用来依次切除绕线转子异步电动机转子回路中的电阻,用来调节启动电流,并可实现调速。图3电路中使用的凸轮控制器有12对触点,其中有4对是用来对电动机进行正反转控制用的,即图3中的触点1~4;有5对是用来依次切除启动电阻的,即图3中的触点5~9;而10~12这3对触点则用于0位保护或行程保护(限位保护)。
【提示】用凸轮控制器操作控制绕线转子型异步电动机,在其转子回路中串联的电阻R是非对称型的,即每相转子绕组上串联的电阻,阻值并不相等,这是为了在保证电动机顺利启动的前提下,尽量减小凸轮控制器的触点数量。
所谓小车的运行控制,是对桥式起重机桥架上的起重机构左右运动的控制。除此之外,桥式起重机还有大车运行的控制。大车是桥式起重机桥架整体沿轨道前进、后退的运动。大车的运动应有两侧轨道上的两台电动机驱动。当然桥式起重机还有用来升降重物的吊钩作上下垂直运动,也须由绕线转子型异步电动机配合凸轮控制器进行控制。图3中点画线方框内是凸轮控制器QM的电路结构,控制器的手轮左旋或右旋各有5挡,还有中间一个0位挡。与每一挡对应的各个触点的通断情况,则须看某触点在各挡位线上有无小黑点。有黑点表示接通,没有黑点表示断开。若启动电动机,须操作凸轮控制器使其处于0位。然后点按启动按钮SB,参见图3,这时交流接触器KM的线圈供电通路被接通,路径如下:电源L3→隔离开关QS→熔断器FU→启动按钮SB→凸轮控制器的触点12(凸轮控制器在0位时接通)→行程开关SQ6→紧急开关SA1→电流继电器KA2常闭触点(KA2是一只双线圈的电流继电器)→电流继电器KA0常闭触点(KA0是一只单线圈的电流继电器)→接触器KM线圈→熔断器FU→隔离开关QS→电源L1,如此接触器KM线圈得电吸合,其主触点闭合。之后接触器KM的线圈经过另一条通路实现自保持,这条通路是:电源L3→隔离开关QS→熔断器FU→接触器辅助常开触点KM-1→凸轮控制器的触点11(凸轮控制器触点11在0位及右旋1~5挡时均接通)→行程开关SQ2的常闭触点→接触器辅助常开触点KM-2→行程开关SQ6→紧急开关SA1→电流继电器KA2常闭触点→电流继电器KA0常闭触点→接触器KM线圈→熔断器FU→隔离开关QS→电源L1。这时由于凸轮控制器处在0位,其它触点1、2、3、4、5、6、7、8、9均断开,所以这时电动机处于待启动状态。如果需要桥式起重机的小车向右移动,则将凸轮控制器手轮向右旋转至1挡,由图3可见,其触点1、3闭合,L1和L2相电源经接触器KM的主触点、电流继电器的线圈、凸轮控制器的触点1、3送达电动机的定子绕组,而L3相电源也同时送达电动机的定子绕组,电动机M2开始启动。由于此时凸轮控制器的触点5、6、7、8、9均不闭合,所以,电动机的转子回路接入全部电阻进入启动状态。电阻值此时最大,限制了启动电流,也保证了较大的启动转矩。随着电动机转速的逐渐增高,转子电流也相应减小,即可将凸轮控制器的手轮由1挡转向2挡,此时会有一段电阻被切除,电动机转速会有加速。随着手轮挡位的逐次旋转,当旋转至5挡时,转子回路中的电阻将全部切除,电动机即可进入正常运转状态。
当然,桥式起重机的小车左右运动的行程毕竟不会很长,所以,也可根据运行情况,将手轮停留在1~5挡中间的一个合适挡位,让小车以一个合适的速度移动。并不一定需要每次移动小车都将凸轮控制器旋转至5挡的较高行走速度。当小车向右移动到极限位置,司机因故未能及时将手轮回转至零位停车时,将会撞击到行程开关SQ2,这会使交流接触器线圈断电,保护设备安全。保护停机后,制动电磁铁YB2线圈也同时断电,对小车进行制动。若遇这种情况,司机应在保护停机后,将凸轮控制器的手轮操作至0位,点按按钮SB使接触器KM线圈得电动作,然后操作凸轮控制器的手轮向左旋转,让小车离开保护停机的位置。小车向左移动时,接触器KM线圈得电的电路通道与向右移动相同,而接触器的自保持电路略有不同,这个自保持通路是:电源L3→隔离开关QS→熔断器FU→接触器辅助常开触点KM-1→凸轮控制器的触点10→行程开关SQ1的常闭触点→接触器辅助常开触点KM-2→行程开关SQ6→紧急开关SA1→电流继电器KA2常闭触点→电流继电器KA0常闭触点→接触器KM线圈→熔断器FU→隔离开关QS→电源L1。在凸轮控制器手轮左旋操作时,电动机的运转方向与右旋时相反,这是由于凸轮控制器的触点在手轮左旋时,其触点2、4接通(见图3),这与手轮右旋时触点1、3接通不同,它使加到电动机定子绕组上的电源相序发生了变化,从而实现了电动机旋转方向的转变。继续左旋凸轮控制器手轮,同样可以逐次切除电阻并调速。图3中,有几个元器件的编号顺序不是从1开始,例如电动机M2,制动电磁铁YB2;或者未与已有的同类元件顺序编号,例如行程开关SQ6。这是因为图3电路是桥式起重机整机电路的一部分,元件编号是其在整机电路中的编号。这里分析了起重机整机电路中的小车电路,为分析整机电路打下了基础。整机电路中的小车电路将绘制的更加简洁。2.桥式起重机的整机电路
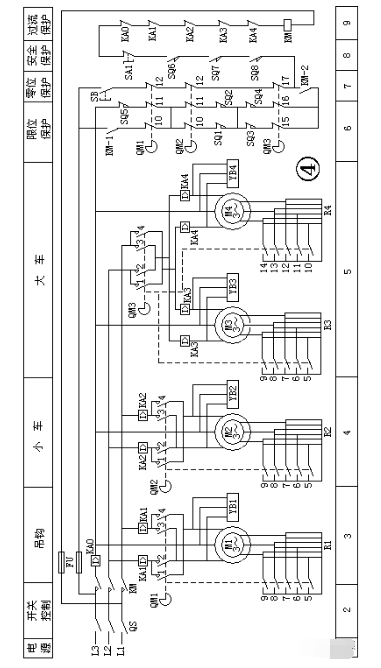
图4是桥式起重机的整机电路,包括QM1(凸轮控制器1)控制的吊钩电动机电路(在图4中的3区)、QM2控制的小车电动机电路(在图4中的4区)和使用QM3控制的两台大车电动机M3和M4的控制电路(在图4中的5区);R1~R4分别为4台电动机转子电路串入的调速电阻;YB1~YB4分别为4台电动机的制动电磁铁。过流继电器KA0~KA4用作过电流保护,其中KA1~KA4为双线圈式,分别保护电动机M1~M4;KA0为单线圈式,串联在主电路的一相电源线中,作为电路的总保护。
桥式起重机的保护电路在图4中的6~9区,保护功能包括零压、0位、过流、行程终端限位保护,以及驾驶室舱门开关SQ6、横梁栏杆门开关SQ7和SQ8的安全保护等。由于在桥式起重机控制电路中,需要保护的电动机有4台,而且保护种类较多,因此,在接触器KM的线圈回路中串联的触点也较多,这些触点有:KA0~KA4这5只过电流继电器的常闭触点;SA1紧急停车开关(紧急情况出现时切断总电源);SQ6驾驶室舱门安全开关;SQ7和SQ8横梁栏杆门的安全开关(SQ6~SQ8连接的是其常开触点,相关的门关闭后才能将其压合至闭合状态。所以,若有任何一个安全门没有关闭,按压启动按钮也不能使接触器KM通电);与接触器KM的线圈回路串联的触点还有3台凸轮控制器的0位保护触点,即QM1、QM2的触点12(在图4中的7区)和QM3的触点17(在图4中的7区);另外,桥式起重机的大车、小车和吊钩共有前后、左右、上下6个方向的运动,除了吊钩下降不需要限位保护外,其余5个方向都需要行程终端限位保护,实施5个限位保护的行程开关的常闭触点SQ1~SQ5也串联在接触器KM线圈的自保持电路中,这5个行程开关处在图4电路图中的6区。行程开关与受保护电器的关联关系见表1。
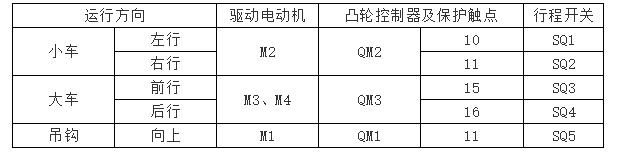
图4整机电路中的大车控制电路,用一台凸轮控制器QM3(在图4中的5区)控制两台绕线转子型电动机M3和M4(在图4中的5区)。这里使用的凸轮控制器,与仅能控制一台电动机的凸轮控制器不同。前者有17对触点,后者仅有12对触点。两种凸轮控制器的相同之处是:
(1)都使用触点1~4控制受控电动机的旋转方向;
(2)都使用触点5~9依次切除一台绕线转子型电动机转子回路中的串联的电阻。它们的不同之处是:
(1)凸轮控制器QM3多了5个触点,即触点10~14,这5个触点用于依次切除电动机M4转子回路中的串联的电阻;这5个触点和电动机M4在图4中的5区;
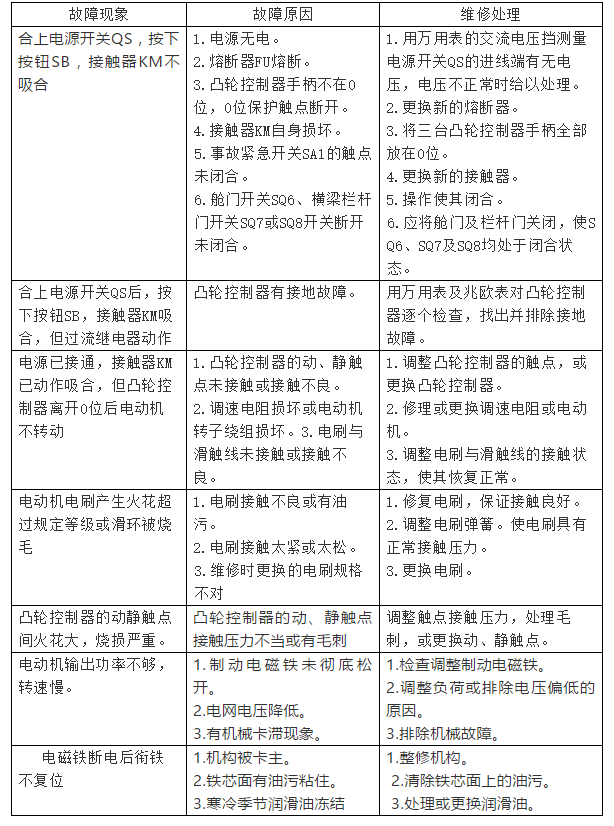
(2)两种凸轮控制器用于0位保护和限位保护的3个触点的编号不同,详见图4中的6区和7区电路。图4电路中,4台电动机各有自己的制动电磁铁YB1~YB4,只要电动机处于断电停机状态,制动电磁铁就对电动机进行制动,从而保证设备安全。三、桥式起重机电气故障的维修处理桥式起重机电气故障的维修处理方法参阅表2。
责任编辑人:CC
-
桥式起重机和门式起重机区别2024-01-30 5935
-
桥式起重机实时监测故障报警物联网平台解决方案2023-11-28 1624
-
变频器在桥式起重机的应用案例2023-05-30 2290
-
桥式起重机常见的故障和解决方法2022-11-16 4140
-
2020,2021年限桥式起重机司机考试技巧及限桥式起重机司机复审模拟考试2021-07-07 1709
-
使用C51单片机和Proteus仿真设计桥式起重机控制系统的应用实例资料2019-05-21 1687
-
桥式起重机电气控制系统 PPT资料2010-05-28 1436
-
桥式起重机桥架结构参数化建模与有限元分析2010-01-21 661
-
PLC在桥式起重机中的应用2009-10-30 3230
-
桥式起重机矢量变频调速电源2009-07-15 1014
-
桥式起重机电气控制线路图2008-12-30 14724
-
桥式起重机控制 PPT2008-11-20 1643
-
起重机电气设计手册2008-11-03 10773
全部0条评论

快来发表一下你的评论吧 !
