

基于彩色MT9V034摄像头 Bayer转RGB FPGA实现
描述
1 图像bayer格式介绍
bayer格式是伊士曼·柯达公司科学家Bryce Bayer发明的,Bryce Bayer所发明的拜耳阵列被广泛运用数字图像。Bayer格式是相机内部的原始数据, 一般后缀名为.raw。
对于彩色图像,一般是三原色数据,rgb格式。但是摄像头一个像素点只有rgb中一种数据(下图为bayer色彩滤波阵列)。但是有很多摄像头直接输出rgb和yuv格式,如ov5640、ov7725等等,这是因为在Sensor模组的内部会有一个ISP模块,会将 Sensor采集到的数据进行插值和特效处理,所以直接输出彩色图像但也有摄像头没有ISP模块,直接输出Bayer数据,这就需要自己写Bayer转rgb算法。
2 MT9V034简单介绍
做图像处理的朋友都知道,MT9V034是一款十分出色的做机器视觉的摄像头,一般都是灰度的。但是也有彩色款,当时我觉得灰度的效果那么好,一时头热就买一个彩色款的。mt9v034用起来很方便,可以不用寄存器配置,上电默认752*480分辨率。当然也可以iic配置。
3 MT9V034 datasheet 简单解析
1) 有效图像 752x480;
最大时钟为27Mhz;
最大帧率为60fps;
10位的adc(我的是八位的输出,店家只将高8位引出,有点影响最后图像的精度);
2)这是mt9v034Bayer阵列,注意输出方向,从左到右,从上到下;
3)摄像头ID号要需要查看摄像头模块PCB上的S_CTRL_ADR1和S_CTRL_ADR0引脚怎么连接的;
4)很明显S_CTRL_ADR1, S_CTRL_ADR0是被拉低了,所以摄像头ID为0x90.上面说到摄像头只有高8位被引出,在这里可以证实了;
5)下面是大部分寄存器,mt9v034可配置的寄存器很少。0x00是芯片版本。03、04是摄像头分辨率
6)datasheet就介绍到这里,更多信息需要自己去阅读。
4 Bayer转rgb算法解析
我是用shift_register IP缓存两行数据,形成2*2窗口(这是FPGA做图像算法最常用的方法和IP),不会的朋友可以搜一搜,有很多博客可以学习,一定要自己仿真一下,搞明白,这原理有点难理解。
根据窗口移动,不难发现,总结出一条重要的规律:总共只有四种窗口,而且与行和列的奇偶有关。
假设计数器从零开始记数:
1)第一种{行偶,列偶}
2)第二种{行偶,列奇}
3)第三种{行奇,列偶}
4)第四种{行奇,列奇}
5 算法实现
首先说明我是用Xilinx的ZYNQ FPGA,(Altera的也有类似的IP)。我直接说明一下IP的参数设置,其他的像怎么添加IP什么的我就不讲了,不会的自己网上学习。
1)这是IP首页,蓝框自定义IP名,修改一下红框的参数,我们是8位数据,一行数据为640个。Clock enable端与sclr端可以根据自己的要求决定勾不勾选。其他默认就行,点击ok可以了。
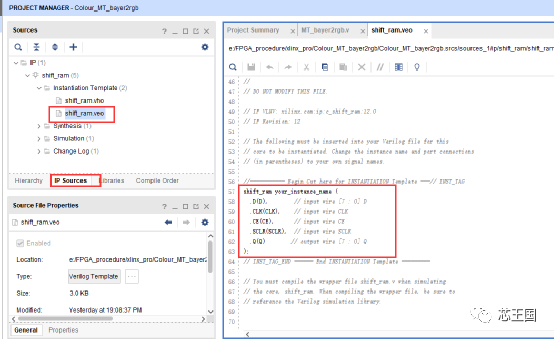
2)Vivado也提供端口例化模板,如下图操作就行;
3)verilog源码
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer: 宏强子
//
// Create Date: 2019/02/04 1056
// Design Name: colour MT98V034 bayer2rgb
// Module Name: MT_bayer2rgb
// Project Name: Colour_MT_bayer2rgb
// Target Devices: ZYNQ7020
// Tool Versions: vivado2018.3
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
//////////////////////////////////////////////////////////////////////////////////
module MT_bayer2rgb(
//system singal
input s_rst_n ,
//cmos simgals
input vsync_i ,
input hsync_i ,
input pclk ,
input [7:0] bayer_data ,
//输出
output vsync_o ,
output hsync_o ,
output [23:0] rgb_data
);
//========================================================================
// =========== Define Parameter and Internal signals ===========
//========================================================================/
reg [9:0] col_cnt ;
reg [8:0] row_cnt ;
reg hsync_i_1 ;
reg hsync_i_2 ;
reg vsync_i_1 ;
reg vsync_i_2 ;
wire [7:0] line_1 ;
wire [7:0] line_2 ;
reg [2:0] data_control ;
reg [7:0] line1_1 ;
reg [7:0] line1_2 ;
reg [7:0] line2_1 ;
reg [7:0] line2_2 ;
reg [7:0] rgb_r ;
reg [8:0] rgb_g ;
reg [7:0] rgb_b ;
//=============================================================================
//**************************** Main Code *******************************
//=============================================================================
//列计数
always @ (posedge pclk or negedge s_rst_n) begin
if(s_rst_n == 1‘b0)
col_cnt 《= 10’d0;
else if (hsync_i == 1‘b1)
col_cnt 《= col_cnt + 1’b1;
else
col_cnt 《= 10‘d0;
end
always @ (posedge pclk) begin
hsync_i_1 《= hsync_i;
hsync_i_2 《= hsync_i_1;
end
always @ (posedge pclk) begin
vsync_i_1 《= vsync_i;
vsync_i_2 《= vsync_i_1;
end
//行计数
always @ (posedge pclk or negedge s_rst_n) begin
if(s_rst_n == 1’b0)
row_cnt 《= 9‘d0;
else if(~hsync_i && hsync_i_1)
row_cnt 《= row_cnt + 1’b1;
else if (row_cnt 》= 9‘d481)
row_cnt 《= 9’d0;
end
//data_control
always @ (posedge pclk or negedge s_rst_n) begin
if(s_rst_n == 1‘b0)
data_control 《= 3’b100;
else if (hsync_i_1 == 1‘b1 && hsync_i == 1’b1)
data_control 《= {1‘b0,row_cnt[0],~col_cnt[0]};
else
data_control 《= 3’b100;
end
shift_ram shift_ram_1 (
.D (bayer_data ), // input wire [7 : 0] D
.CLK (pclk ), // input wire CLK
.CE (hsync_i ), // input wire CE
.SCLR (~s_rst_n ), // input wire SCLR
.Q (line_1 ) // output wire [7 : 0] Q
);
shift_ram shift_ram_2 (
.D (line_1 ), // input wire [7 : 0] D
.CLK (pclk ), // input wire CLK
.CE (hsync_i ), // input wire CE
.SCLR (~s_rst_n ), // input wire SCLR
.Q (line_2 ) // output wire [7 : 0] Q
);
always @ (posedge pclk or negedge s_rst_n) begin
if(s_rst_n == 1‘b0) begin
line1_1 《= 8’d0;
line1_2 《= 8‘d0;
line2_1 《= 8’d0;
line2_2 《= 8‘d0;
end
else begin
line1_1 《= line_1;
line1_2 《= line1_1;
line2_1 《= line_2;
line2_2 《= line2_1;
end
end
always @ (data_control) begin
case(data_control)
3’b000 : begin
rgb_r = line1_1 + 8‘d5;
rgb_g = line2_1 + line1_2 + 8’d10;
rgb_b = line2_2 + 8‘d5;
end
3’b001 : begin
rgb_r = line1_2 + 8‘d5;
rgb_g = line1_1 + line2_2 + 8’d10;
rgb_b = line2_1 + 8‘d5;
end
3’b010 : begin
rgb_r = line2_1 + 8‘d5;
rgb_g = line1_1 + line2_2 + 8’d10;
rgb_b = line1_2 + 8‘d5;
end
3’b011 : begin
rgb_r = line2_2 + 8‘d5;
rgb_g = line2_1 + line1_2 + 8’d10;
rgb_b = line1_1 + 8‘d5;
end
default: begin
rgb_r = 8’d0;
rgb_g = 9‘d0;
rgb_b = 8’d0;
end
endcase
end
assign rgb_data = {rgb_r,rgb_g[8:1],rgb_b};
assign vsync_o = vsync_i_2;
assign hsync_o = hsync_i_2;
endmodule
6 总结
最后说明一下,最后分辨率改为640*480,但是发现480指的是0~480,所以行计数器在481清零。由于我使用的是ZYNQ,所以直接使用PS端的IIC接口配置摄像头。如果用默认的分辨率就需要修改一下IP的深度和行计数器的清零的数值就行了。
编辑:jq
-
mt9v034的中文技术手册2023-10-09 1371
-
DCMI接口处理摄像头的数据怎么都进入不了行中断或者场中断是怎么回事2022-02-15 1075
-
【FPGA DEMO】Lab 4:摄像头HDMI显示(高速--HDMI&摄像头)2021-07-30 3555
-
如何使用FPGA实现Bayer到RGB图像格式转换的设计2021-01-25 1527
-
玩转Zynq连载49——[ex68] MT9V034摄像头的图像FFT滤波处理2020-01-09 5903
-
如何使用全局快门MT9V034摄像头2020-01-08 2668
-
玩转Zynq连载46——[ex65] MT9V034摄像头的图像拉普拉斯边缘提取2019-12-30 1919
-
玩转Zynq连载45——[ex64] MT9V034摄像头的图像拉普拉斯锐化处理2019-12-26 3104
-
玩转Zynq连载44——[ex63] MT9V034摄像头的图像平滑处理2019-12-24 3933
-
介绍摄像头采集显示的例程2019-10-01 3636
-
数字式CMOS摄像头在智能车中的应用2018-11-01 3254
-
福利来了,各种FPGA驱动摄像头实例分享2018-09-03 10882
-
想要用STM32F407驱动两个MT9V034的摄像头,不知可行否,如果可以的话该怎样设置,两个摄像头的切换呢?2017-03-28 8143
全部0条评论

快来发表一下你的评论吧 !
