

针对机器人奇异点的处理方法有哪些?
电子说
描述
在调试机器人时,如果机器人处于下图状态(处于J4轴和J6轴同轴),会发生报警:MOTN-023或者MOTN-063,在此情况下,机器人只能在关节坐标系下移动。以下姿态即为奇异点位置。
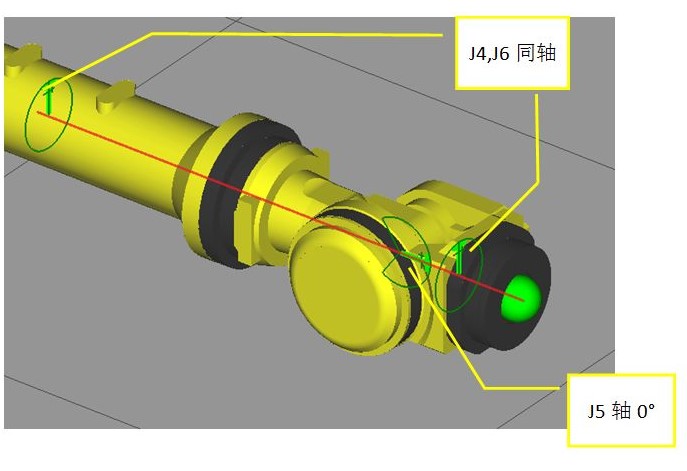
机器人奇异点位置
当机器人J5轴处于0°位置,机器人会出现MOTN-023报警:
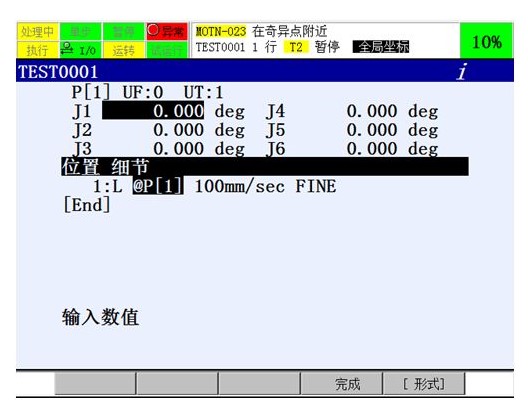
MOTN-023报警
当机器人在执行动作类型为L,C,A的动作指令时,如需经过奇异点,机器人会出现MOTN-063报警。
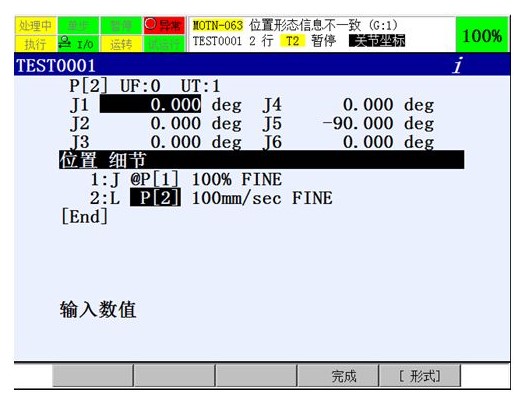
MOTN-063报警
针对奇异点的处理方法
情况一:在机器人示教时遇到奇异点
处理步骤:
a) 将机器人的示教坐标系切换到关节
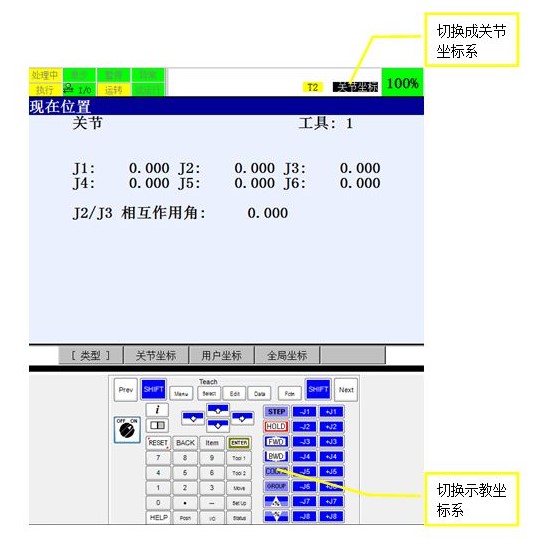
示教坐标系的切换
b) 点动机器人,让J5轴调离0°的位置,建议小于-3°或者大于3°
c) 按RESET键复位报警
情况二:在程序运行时遇到奇异点
方法一:适合在无精细点位要求使用。
当运行程序时遇到奇异点,可以将该行动作指令的动作类型改为J,或者修改机器人的位置姿态,以避开路径当中存在的奇异点。
方法二:适合在有精细点位要求使用。
在动作指令后添加附加动作指令:手腕关节动作指令WJNT(全名Wrist Joint)。
手腕关节动作指令(Wrist Joint),不在轨迹控制中对手腕的姿势进行控制(标准设定下,程序运行时,手腕的姿势始终被控制)。在直线动作、C圆弧动作、A圆弧动作时能够使用该指令。
当遇到奇异点时,程序中使用该指令,手腕的姿势在动作中发生变化,避开奇异点造成的手腕轴反转动作,使得工具中心点继续沿着轨迹动作。
处理步骤:
a) 将光标移至出现奇异点程序行行末,点击F4选择
b) 选择Wrist Joint
c) 按RESET键复位报警
d) 运行程序,观察运行轨迹。
责任编辑:lq6
-
机器人餐厅2014-07-26 2638
-
什么是工业机器人2015-01-19 6815
-
机器人视觉——机器人的“眼睛”2015-01-23 6158
-
我与我的机器人2015-08-05 4861
-
【机器人在线】工业喷涂机器人误差修正方法发展趋势2017-07-13 2810
-
先进机器人控制2017-09-19 4632
-
LabVIEW 的Tripod 机器人视觉处理和定位研究2019-06-01 2973
-
竞赛机器人制作技术(电路设计、编程方法、算法解析)2019-12-25 5616
-
ARM处理器的机器人硬件设计方法2020-05-20 2853
-
机器人的定义是什么?工业机器人的应用有哪些?2021-07-05 5491
-
机器人是什么?2022-03-31 22347
-
工业机器人奇异形位的分类及其避开奇异形位与障碍等方法的介绍2017-10-11 3292
-
常用的机器人编程方法有哪些2019-08-15 18838
-
发那科机器人针对奇异点的处理方法2023-08-05 5836
-
abb机器人home点设置方法2024-06-17 9129
全部0条评论

快来发表一下你的评论吧 !
