

微型嵌入式操作系统γOS和系统编程语言AntC的应用开发
描述
作者:王鹦鹉,郑扣根,瞿心杭
一 引言
网络传感器是集传感器技术、嵌入式计算技术、现代网络及通信技术、分布式信息处理技术于一身的资源受限的嵌入式设备,是“普适计算”在微型嵌入式领域的一种重要应用模式。
网络传感器的研究过去一直受限于硬件平台而发展缓慢。随着半导体技术、通信技术、微电子技术和微机械技术的不断进步,低功耗、低价格、多功能的传感器网络系统得到了快速发展,使得制作微小、有弹性、低功耗的传感器节点成为现实。
二 背景
1 应用特点
网络传感器应用有其自身的特点,主要有以下几个方面:小尺寸和低功耗、并发密集操作、有限的物理并行性和控制层次、多样化的设计和使用。一方面,传感器资源极其有限,给底层嵌入式程序设计带来较大的限制;另一方面,传感器上运行的应用程序和系统内核通常是紧密结合在一起的,且运行时需要的任务数量、执行时间、执行结果以及内存消耗等是可以较好预计的。
此外,传感器种类繁多,针对不同应用场合需要不同种类的传感器;在军事应用、空间探索等特定应用场合下,更是需要大量的不同种类的传感器协同合作来完成特定应用事件。因而传感器上运行的软件系统如果能够具备相对较好的灵活性、可配置性和可重用性,将能更好地满足应用需求。
1.1 现有嵌入式OS比较
当前存在众多的嵌入式操作系统,其中具有代表性的如Vxwork、WindowsCE,pSOS和Neculeus等,它们的优点是:功能强大;具有丰富的API和嵌入式应用软件;具备良好的实时性能,尤以Vxwork为代表;具备良好的稳定性。缺点是:价格昂贵;源代码不公开,以及由此导致的诸如对设备的支持、应用软件的移植等一系列的问题;另外对于传感器器件来说,这些嵌入式OS都显得过于“庞大”了一些。 uc/os和嵌入式Linux当前正获得越来越广泛的应用。
它们的优点是:执行效率高、占用空间小、可扩展性能好,同时是免费且源代码公开的。uc/os具备良好的实时性能,嵌入式Linux的实时性能有待进一步提高。缺点是:它们都是相对通用的嵌入式操作系统,不能完全适应传感器应用领域的需求,如嵌入式Linux最小仍然需要上百K的ROM和RAM空间才能工作,而uc/os的内核尽管可缩减至几K,但是对于某些传感器应用来说,仍然显得不够精简。
UC Berkeley设计开发了无线传感器网络应用的嵌入式操作系统TinyOS以及系统编程语言nesC。我们在剖析现有嵌入式OS特别是TinyOS的基础之上,设计实现了支持网络传感器的微型嵌入式操作系统γOS,并开发了系统编程语言AntC。
1.2 γOS设计
γOS是以网络传感器应用为目标的微型嵌入式操作系统,针对网络传感器的前述应用特点,γOS的设计具备几个特性:支持足够微小的硬件系统,便于传感器设备在检测环境中的任意撒布;支持足够低的系统功耗,保证传感器设备具备足够长的生命期;支持集成可与物理世界交互的传感设备,实现数据的采集和传输;同时兼顾适度灵活的可重用性、可配置性。
γOS还必须解决传感器网络的两个突出问题:
1)由于网络传感器操作的并发密集性,因而必须保证众多不同数据流的并发即时传输;
2)系统必须提供高效的模块化管理策略,具体硬件设备和具体应用组件必须紧密地结合在一起,减小处理和存储开销。为此,γOS的设计重点主要集中在以下几个方面:低能耗的微型内核;微线程的系统架构;组件化的功能设计;支持传感通信的接口。
1.3 支持低能耗的微型内核
为了降低能耗,γOS设计了一种相对简单的内核机制,它由两部分组成:系统初始化代码以及一个微小的核心调度组件。系统初始化代码具有平台相关性;核心调度组件实现基于优先级的两级调度机制,它分别由两个调度队列组成:事件队列和任务队列。事件队列优先级高于任务队列的优先级,每个队列内部基于FIFO调度机制。
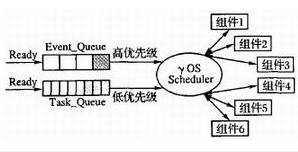
图1 γOS的内核调度示意图
此外,为了降低能耗,在借鉴TinyOS的能耗管理算法的基础之上,设计实现了能耗控制组件:动态电源管理DPM组件和动态电压调整DVS组件。
1.4 微线程的系统架构
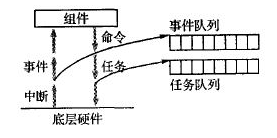
图2 微线程的系统架构
如图2所示,γOS的通过组件来实现基于事件驱动模式的微线程系统架构,采用事件触发去唤醒相应的功能组件工作。每个功能组件可以由以下几个部分组成:事件处理函数 用以实现对底层硬件中断的处理,如MCU外部中断、定时器中断等,它可以向核心调度组件提交任务,但并不等待任务的执行。事件优先级高,可抢占任务执行,可以传递。
它提供了一个简明的方法用于抽象软硬件之间的边界,使得支持硬件中断变得非常简单。
命令: 用以执行对底层组件的操作,是非阻塞的,且必须向调用者返回命令执行的结果(成功或失败)。
任务: 用于表示组件中计算相对集中的一组操作。任务不具有抢占性,任务与任务之间是原子化的,以先进先出的方式执行,即一个任务必须执行完之后才能执行下一个任务。但任务可以被事件处理函数抢占。
组件状态 用以表示组件当前的工作状态,可以被自己的功能函数或其他组件所参考。
利用微线程的系统架构,γOS可有效降低上下文切换代价;同时,通过引入原子语句来处理任务和事件,甚至事件和事件之间的并发操作,实现微线程异步通讯机制,有效地避免阻塞、轮询和数据资源竞争。
1.5 组件化的功能设计
在特定应用场合下,需要大量的不同种类的传感器协同合作来完成特定应用事件,因而传感器上运行的软件系统具备相对较好的灵活性和可配置性。
为此,γOS提供了对组件化的功能设计方式的支持。γOS可分解为一个核心调度组件和若干功能组件。现有的功能组件主要包括:能耗控制组件如动态电源管理DPM组件和动态电压调整DVS组件,AntIP协议(支持微型嵌入式TCP/IP协议)组件,USB驱动组件,网卡驱动组件和XML分析器组件等。
根据不同应用配置不同的功能组件,以实现特定的目标。γOS支持静态配置和动态加载两种方式。静态配置组件最少可只包括一个核心调度组件,而其他的功能组件
可根据相应的应用需求选择预先静态配置方式或者动态加载方式。
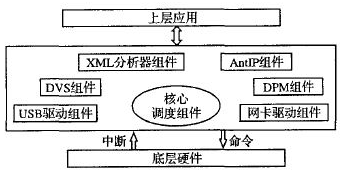
图3 γOS组件示意图
1.6 支持传感通信的接口
γOS通过AntIP组件实现对传感器通信的接口支持,主要有支持传感器节点间的对等(Peer-To-Peer)通信和组播通信模式,支持传感器节点与PC间的对等通信模式和支持基于事件的异步通信处理模式。
AntIP是一个适用于8/16位机的微型嵌入式TCP/IP协议栈,它尽管去掉了许多全功能协议栈中不常用的功能,但仍然保留了网络通信所必要的协议机制,支持ARP,IP,ICMP,TCP,UDP等协议,并且提供了简易的应用层接口和设备驱动层接口。AntIP的设计借鉴了uip的设计思想。
2 典型应用
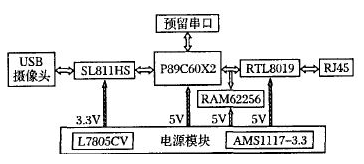
图4 硬件平台示意图
γOS是以网络传感器应用为目标的,它可以运行在多种目标传感器上。我们采用γOS机制,针对图像数据采集方面的应用,设计了一套较典型的网络图像传感器系统。该系统主要由主控模块、存储模块、USBhost模块、以太网模块、摄像头模块和串口模块(预留接口)组成,采用的芯片分别为Philips公司的p89c60x2(80C51芯片)、USB控制芯片SL811HS、RAM芯片62256和NIC芯片RTL8019AS。
平台部分初始化代码(AntC语言)如下:
useSL811HS
useCamera
useRTL8019
classPlatform
{
publicstaticintInit()
{
RTL8019.Init();
if(SL811HS.UsbInit()==FALSE)
return-1;
if(Camera.CameraInit()==FALSE)
return-1;
if(Camera.CameraStart()==FALSE)
return-1;
AntIP.Init();
return1;
}
publicstaticvoidStart()
{
postAntIP.Run;
}
publicstaticvoidmain()
{
Init();
Start();
}
}
该部分代码做了网卡模块、USB模块以及摄像头模块的初始化工作。
三 结语
采用γOS的网络图像传感器的各模块的代码量及所需数据空间大小如表1所示。从该表中可看出γOS的核心代码量基本接近TinyOS的核心代码量。
表1 模块代码量与所需数据空间
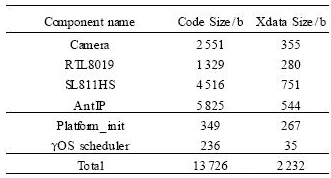
在这篇文章中,我们简要阐述了网络传感器在普适计算环境下的应用特点,介绍了一个以网络传感器为应用目标的嵌入式操作系统γOS的设计和几个特点,并建立了一个典型应用平台,最后简要给出了γOS在该平台上的性能。
责任编辑:gt
-
什么是嵌入式操作系统?2021-12-23 10321
-
嵌入式操作系统2021-11-03 2515
-
课堂笔记之嵌入式Linux操作系统2021-11-02 1095
-
嵌入式操作系统的发展2021-10-27 1680
-
如何学习C语言嵌入式系统编程2019-11-11 4459
-
C语言在多种嵌入式系统编程时的方法步骤详解2017-12-11 9719
-
C语言的嵌入式系统编程修炼之道2017-10-24 1122
-
C嵌入式系统编程2017-10-23 1073
-
C语言嵌入式系统编程修炼2016-01-08 806
-
C语言嵌入式系统编程修炼之道2010-11-03 576
-
cc++嵌入式系统编程.rar2010-03-04 687
-
C语言嵌入式系统编程教程2010-02-10 771
-
C语言嵌入式系统编程技巧2009-12-23 35695
全部0条评论

快来发表一下你的评论吧 !
