

利用电磁耦合器件实现水下设备供电的优化设计
描述
作者:刘敬彪,陈贻想,于海滨
随着科学技术的发展,我国对海洋的科考有了长足的发展。本文结合“深海抓斗”、“深海浅钻”等海洋科考设备对其供电系统进行改进。目前多数水下设备都使用电池供电,也有部分进行电缆传输。本文通过对电源系统进行改进,以无电缆连接实现能量传输,减少对仪器设备的束缚,配合水下非接触式耦合信息传输,实现“无线”水下设备,为海洋科考实验提供更加优越的实验环境。同时,无接触的能量传输可以有效地避免因为电源插口外露、电缆拖曳断裂带来的安全隐患,提高系统的安全性。
常见的无线能量传输方式有三种:电磁感应、电磁辐射、电磁谐振。而耦合器主要有两种形式:导轨形式、柱体形式。本设计重点阐述利用电磁耦合方式的设计方法,并提出优化策略实现水下的设备供电。
1 水下无线能量传输原理
根据麦克斯韦方程,变化的电场可以产生磁场,而变化的磁场又可以产生电场。本设计基于此基本原理,利用电磁耦合器件,实现电—磁—电的转换,其中的磁是在水中传播。同时针对水中电导率较大的情况进行模型优化。
2 系统构成
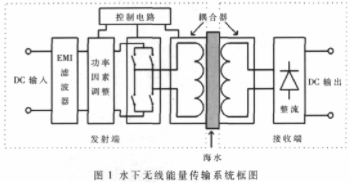
水下无线能量传输系统可分为三大部分:高频逆变和后端的整流电路、控制电路及耦合器。高频逆变和后端的整流电路可对控制信号进行驱动放大用以控制逆变电源;控制电路可产生PWM控制信号,同时根据电路的状况进行过压保护处理;耦合器是实现能量水下隔离传输的重点,其设计的好坏对传输效率有很大的影响。系统框图如图1所示。
2.1高频逆变电路
本设计采用的是全桥整流电路实现高频逆变,全桥逆变效率虽然不高,但实现的逆变功率较大。为此,选用了MOSFET功率器件,能够在MOS管发热损耗较少的情况下,实现大功率的能量传输。MOS管的开关驱动电路由IR公司的驱动芯片与门级关断钳位电路组成。IR2110是IR公司推出的带自举的低成本驱动芯片,广泛应用在各种MOS管与IGBT驱动电路中,上臂自举能减少所需的驱动电源数目。门级关断钳位电路是用两级MOS管组成反相器。驱动电路的设计关键点是选择自举电容C1与上拉电阻R23。在Q13关断时C1能被快速充电,开通Q14,把Q13的栅源极电压控制在门级阈值电压以下,所以C1与R23构成的充电电路时间常数要小,以便实现快速关断,减少开关损耗。在Q13、Q15开通时,Q14始终保持在阈值电压以下,电容C1通过R23对桥的左边放电,但Q13、Q15的电平仍然要保持在高电平,所以R23的阻值要大,C1值要小,以减小由D13、R23、Q15构成的电路电流和减少自举电源的功耗。在实际电路中采取牺牲辅助电源的部分功耗,R23选取500 Ω,便能取得一个较好的效果。全桥MOS管驱动电路如图2所示。

通过示波器观察可以看到驱动电平已没有常见的下桥干扰毛刺(下臂的驱动电路同理)。在Q14栅极上的R21、R22、R24、D11构成电路对驱动电压进行防震荡处理,D11加快电平下拉。D12、R24在门级钳位电路中,当Q13栅极上有毛刺且超过15 V齐纳而被击穿时,起到保护Q14的效果。同时开关的13 V电平跳变更加快速,Q值更高,可减少开关损耗。
2.2 控制电路
本设计采用STM32F103VBT6为主控芯片。该芯片是ST公司推出的一款基于Cortex-M3内核的高性价比ARM处理器,最高主频可达72 MHz;其自带3通道的互补6路输出定时器,选用其中2通道与DMA功能一起使用,能有效地实现输出全桥PWM控制,同时其自带的多通道12位AD可以满足系统的各种参量的测量需要。
实现过流过压保护,可在左右臂的下臂接地处串接0.1 Ω的康铜电阻,再用LTV274运放放大其两端的电压后,接到STM32的自带12位AD脚进行电流监测。同理对输入的直流电压用电阻分压后接到AD脚。当检测到超过预设值(电压500 V,电流3 A),将关断信号发送给两片IR2110的DS端,关断MOS管,并关闭输入电源,直到电压恢复到较低的水平(对应的电压<10 V,电流<0.1 A)后重新开启系统。
2.3耦合器
耦合器的材料选取常用的变压器材料有硅钢、镍铁合金、钴铁合金、非晶体金属合金及铁氧体。考虑到频率比较高,而且是大功率传输,选取铁氧体磁芯为设计材料。根据耦合器能量传播的特点,要保证磁路是开放对称的,以有利于能量的传输,选取实验磁芯的外形有PC型、RM型、GU型,同时要考虑磁芯所能承受的最大功率,本文的功率为视在功率,是输入输出功率的和,而体积过小的磁芯进行大功率传输将面临磁芯温升等问题。

其中:D为电压导通的占空比,实现计算时最大值可取 0.5。代入相关参数可知至少需要4股线。
根据计算所得的模型参数,进行有限元建模分析。有限元分析是一种目前在工程上较为实用的分析方法,其基本的思路就是将原本复杂的整个模型分解成较为简单的小区域,再加上一定的边界条件限制,即可以求出一些小区域的解,同时解可与边上的小区域共享,最终求得整个模型的近似解。
3 仿真与实验结果
图3所示为GU型磁芯,以及绕线、1/2水下截面的有限元进行区域划分后的状况。其磁导率采用的参考文献[4-5]的模型,取有球型进行仿真。假设下端的磁芯为发射端,上端为接收端。仿真结果显示了下端磁芯线圈在200 V、100 kHz电源作用下水中的磁场分布状态。在大气隙情况下,有比例大的磁力线未经过次级线圈,所以效率必然较低。至此改变频率、电压、气隙等参数,重新仿真直到最优结果。

图4所示为输入电压对输出效率和功率的影响,采用的是GU50磁芯,在水中输入100 V、100 kHz电压,气隙为5 mm。

图5所示为在相同条件下,耦合磁性的电感进行改变后的耦合输出效率。
图6所示为系统实物图,图中上方是驱动电路部分。电路工作时,直流电源由PIN进入,经过高频逆变后,输入至POUT到磁芯。采用PC74磁芯在约2 cm的气隙下点亮60 W灯泡。

本文论述了基于电磁耦合的水下无线能量传输系统的设计与优化方法。针对驱动电路部分详细论述了一种实现较高功率的中高频逆变电路。同时提供了有效的耦合器设计方法。本系统经过水下验证,实现了最大电压300 V、最大输出电流2 A,在5 mm气隙下实现最大输出功率为350 W。
责任编辑:gt
-
光电耦合器的基础知识与应用解析2024-11-22 2386
-
无线耦合器怎么分进出线2024-08-14 2417
-
基于电磁耦合的水下无线能量传输系统该如何去设计?2021-06-03 1682
-
采用STM32F103VBT6处理器实现水下无线能量传输系统的设计2020-01-16 4341
-
水下插拔电连接器可保障水下设备的正常运作2020-01-06 1812
-
我国的水下插拔电连接器可保障水下设备的正常工作2019-12-25 1889
-
耦合器工作原理介绍2018-08-22 29385
-
【转帖】几种光电耦合器件及应用电路2018-08-21 2382
-
光电耦合器件的构成原理2012-12-07 2568
-
常用的光电耦合器应用电路2012-07-20 4664
-
毫米波定向耦合器的设计与优化2011-06-21 1032
-
基于电磁耦合的水下无线传输系统2011-02-23 1250
-
光电耦合器件2009-09-11 1065
-
光电耦合器应用电路2008-09-13 7236
全部0条评论

快来发表一下你的评论吧 !
