

基于可编辑逻辑和数字信号处理器实现雷达模目信号的应用设计
描述
雷达系统在研制过程中,各部分往往是并行的,在调试信号处理分系统时,如果天线没做好,就得不到阵面送下来的回波数据,这时调试就无法正常进行。为了解决这一问题,往往先设计一个模目信号,把信号处理分系统调试好,待其他分系统也调试好后,再切换为正常接收模式,进行系统联试。
本文介绍了一种模目信号设计方法,利用FPGA产生时序及控制,DSP实时计算所需要的回波,从而实现对雷达目标回波的模拟,这样可以在没有阵面数据的情况下,使信号处理分系统调试能够正常进行,从而不影响科研进度,做到有问题早发现。
1系统原理
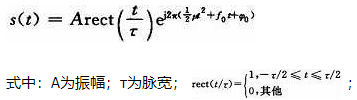
由于要调试的是PD体制雷达,所以要模拟的信号是带有多普勒频移的雷达目标回波。这里雷达发射波形为线性调频信号,其时域表达式为:μ为调频斜率;fo为载频;φo为初相。那么当雷达对空照射时,如果遇到目标,就会产生回波,回波是受目标调制了的发射信号,所以通过和发射信号相比较,就可获得目标的相关信息,在此仅考虑目标相对雷达匀速径向飞行的情况。当回波被雷达接收后,经过解调,得到的将是带有多普勒频移的线性调频信号,由于已假设目标沿径向匀速飞行,所以回波信号相对于发射信号来说,在相位上仅时间的一次项改变,即发生了多普勒频移。回波的时延反映目标的远近,幅度反映目标的散射截面积。
通过以上分析可知,要产生模目信号,可以通过改变发射信号(未调制至载波)的频率中心、时延和幅度这三个参数来实现,通过对这三个变量的控制,就可模拟出目标的径向速度、径向距离以及雷达散射截面积。
2系统方案
由于模目信号可以通过改变发射信号得到,又发射信号的波形已知,所以可以通过对发射信号进行实时变换,来模拟所期望的回波。系统实现如下:为了解距离和速度二维模糊,雷达设置了N种重频,每种重频的脉宽不同,在系统带宽(其决定雷达的距离分辨率)一定的情况下,每种重频发射信号的点数为:脉冲时宽×系统带宽,此点数也就是目标回波的点数,这样就可以预先把发射波形存于DSP内存,然后根据系统控制字,取出需要的波形,再在DSP中实时计算出所需要的模目信号。模目信号需要系统时序来同步,系统时序如图1所示。

图1系统时序
图1中BW为雷达波位脉冲,CPI为相干脉冲导前,FR为单个脉冲信号。系统会在每个CPI到来时打入系统控制字,告诉信号处理分系统阵面ID、工作模式、CPI代码等信息,信号处理分系统会根据收到的控制字来进行相应的工作,模目距离和模目多普勒也会在系统控制字中给出,这样就可在系统时序同步下,根据所收到的控制字产生模目信号。
模目信号属于系统内部的测试信号,所以不需要单独的插件产生,可以考虑做在信号处理流程比较靠前的插件上,比如DBF插件或者脉压插件。由于本系统脉压插件资源有剩余,且对于产生模目信号足够,所以将模目产生模块放在脉压插件上,用到的器件是一片FPGA和一片DS-P,其中FPGA的作用是接收光纤送来的控制字,对DSP发起中断并缓存DSP产生的模拟回波,然后在系统时序的同步下将模拟回波送后续处理;DSP的作用是根据系统控制字信息,在一个FR时间间隔内产生所需要的多波束目标回波,系统实现框图如图2所示。

图2系统实现框图
系统工作流程为:DBF分机提供系统控制字、时序和外时钟,其中系统控制字通过光纤送出,每个CPI送一次,时序和外时钟通过射频电缆送出。当FPGA收到控制字后,将其缓存于双口RAM,等到第二个FR,给DSP发起中断,通知DSP取走控制字。DSP从控制字中提取CPI代码、FR代码、模目距离和模目多普勒等信息。通过CPI代码可以知道雷达当前发射的是哪种波形,即哪种线形调频信号,通过FR代码可以知道当前脉冲是该相干处理脉冲组中第几个脉冲,通过模目距离和模目多普勒可以知道系统要求模拟目标所处的距离和相对径向速度。由于系统控制字已在第二个FR得到,所以在接下来的FR中,DSP只需读进FR序列号,就不需要再读控制字。读FR序列号的目的是为了计算模目由于存在径向速度而产生的相位,即φd=fd(n-1)Tr,其中:n即为FR序列号;Tr为脉冲重复周期,一旦获得这些信息,就可以计算模目。在计算模目的过程中,采用了乒乓存储方式,即当前FR产生下一FR的数据,并存于FPGA的双口RAM中,等下一FR到来时,延迟到系统控制字所给的模目距离单元所对应的时刻,读出模目数据即可。为了使目标回波与实际情况一致,要求模目信号在距离和多普勒上都要模糊,由于系统控制字送来的参数是非模糊的,那么转换方法为:模糊距离=真实距离mod本相干处理脉冲组对应的距离,模糊多普勒一真实多普勒mod本相干处理脉冲组对应的重频,其中mod为求模,这一过程在DSP中完成。
3调试过程
调试所用到的分机有:综合电子分机,送时序和控制字;DBF分机,完成控制字中CPI代码和FR代码的填充,并通过光纤将控制字送至DSP分机,本模目信号产生模块就在DSP分机的脉压插件上;频率源,给每个分机提供时钟;除此之外,还需要一台直流稳压电源。
系统加电后,DSP初始化完成就处于等待状态,当有时序和系统控制字送来,DSP就根据控制字的要求产生模目信号,并在时序的同步下将信号送往FPGA,然后再由FPGA送后续处理。系统设置三个信号采集和观察点,第一个在DSP上,通过仿真器采集系统控制字以及产生的模目数据,并将该数据和Matlab计算的数据做比较,看是否正确;第二个在FPGA上,通过Quartus自带的SignalTap工具,观察产生的模目信号波形,以及该信号经脉压后的波形,看波形是否为线性调频信号,点数是否正确,脉压能否出结果;第三个在DSP插件上,通过在DSP上采集脉压后的信号,对同一距离单元做FFT,看结果是否在期望的距离单元及期望的频道上。
下面给出其中一种模拟波束在各信号采集和观察点的图形:图3为DSP计算的模目数据(实部),图4为SignalTap采集的模目信号(I,Q双通道),图5为模目信号经脉压后的波形,图6为对脉压后同一距离单元信号做FFT。

图6对脉压后同一距离单元信号做FFT
可见系统正确模拟了目标回波,达到了预期效果。

4结语
本文介绍了一种雷达模目信号产生方法,该方法能够通过FPGA和DSP实时产生具有多普勒频移的多波束雷达目标回波,其意义在于可以为雷达信号处理分系统单独调试提供数据来源,从而不必等待天线阵面的真实数据,这样可以加快科研进度,也方便整机联试时查找问题。
责任编辑:gt
-
数字信号处理器(DSP)简介2022-08-02 23386
-
基于FPGA和DSP的雷达模目信号设计2011-07-13 3951
-
数字信号处理器的特点2020-12-09 2141
-
超高速雷达数字信号处理技术2009-10-21 2218
-
数字信号处理器(DSP)2010-01-04 3777
-
基于双数字信号处理器(DSP)的实时相关图像处理系统的设计2011-02-24 765
-
基于MEMS和数字信号处理器的露点传感器设计2017-02-07 1083
-
DSP是什么?详解DSP又称数字信号处理器2017-05-18 51347
-
浅谈数字信号处理器的分类及选择2018-10-29 6886
-
数字信号处理的资料概述2019-11-13 1410
-
基于数字信号处理器实现雷达信号处理系统的设计2020-12-31 3516
-
如何使用FPGA实现数字信号处理算法的研究2021-02-01 1511
-
数字信号处理器的常见故障2023-05-31 5562
-
数字信号处理器概论2023-08-07 14555
-
信号、系统和数字信号处理知识整理2023-12-08 1390
全部0条评论

快来发表一下你的评论吧 !
