

通过嵌入式运动控制加速创新
电子说
描述
嵌入式运动控制器减少了算法开发、实施和测试的多个周期,以设置一些参数并将代码导出到您自己的固件。
自动驾驶汽车、先进的 3D 打印机和下一代“智能”假肢有什么共同点?他们都是嵌入式运动控制技术出现的受益者(另见“推动嵌入式运动控制的三大趋势”)。这些系统将特定应用的运动控制芯片与开放的硬件和软件平台配对,是第四次工业革命的一部分,这一趋势正在加快机器人、工业自动化甚至使用机电技术的消费产品的创新速度.
这类新型设备通过将最基本的控制功能“封装”为硬件逻辑或经过验证的软件构建块,嵌入式开发人员可以使用与传统应用程序相同的丰富工具集和代码库来处理这些功能,从而简化了机电一体化产品的开发。除了显着缩短开发周期外,嵌入式运动控制器还可以为现有产品添加新功能,同时也促进了许多新产品类别的出现。
智能世界的智能电机
嵌入式运动控制器几乎可以将任何电机变成“智能电机”,从而使设计人员能够轻松且经济高效地创建具有更高性能、效率以及在某些情况下具有全新功能的产品. 其中一些包括以下内容:
-
高级渐变(也称为“S 形渐变”):本视频中展示的奇特“啤酒移动器”说明了如何使用加速整形1在两点之间快速移动整杯,而不会溅出一滴珍贵的水滴。相同的原理可以应用于医学研究或任何其他液体处理应用中使用的移液机器人。类似地,不断调整机械臂的加速和减速率使其能够达到更高的速度,并且仍然准确地到达其下一个位置,而对其有效载荷的干扰最小。这些算法还可以帮助工业材料运输商快速高效地移动重型有效载荷。
-
磁场定向电机控制(也称为“矢量控制”):一种通过实时计算输送到其定子的驱动电流的相位和幅度来以峰值效率运行电机的技术。该算法广为人知并广泛用于大型电机,但它可以在电动自行车、电动工具和其他消费类应用中提供更长的电池寿命、更低的运行温度以及其他优势。
-
更智能的步进电机:步进电机价格便宜且易于使用,但在精度和精度方面存在局限性;此外,它们还受到操作噪音的影响。这些问题可以通过启用微步进的智能控制算法来克服,从而使它们能够像更昂贵的伺服电机一样运行;此外,通过塑造它们的驱动脉冲来产生更平滑、更安静的步骤。
直到最近,这些类型的功能都过于复杂,无法在许多商业和消费产品中实现。然而,这种情况正在改变,因为运动控制受益于同样的“硅革命”,帮助计算机从 1960 年代的早期大型机发展到今天功能强大且价格合理的 PC。
从大型机到大众市场
最初由高端工作站和定制电子设备机架驱动,早期的运动控制系统体积庞大且价格昂贵。这些早期系统凭借独特的功能(例如可变加速度和负载感应)迅速证明了其高昂的价格是合理的,这些功能为制造和其他工业自动化应用带来了新的精度、灵活性和生产力水平。
在接下来的十年中,日益强大的数字信号处理器 (DSP) 和更大的低成本现场可编程门阵列 (FPGA) 使运行复杂算法的控制器的成本大幅降低,这些算法对机构的运动学以及电机控制进行建模需要以精确的方式移动它的信号。尽管如此,该技术的采用仍然受到创建应用软件所需的时间和专业知识的限制。存在用于运动控制的可重用 DSP 和 FPGA 代码库,但它们通常被设备制造商牢牢掌握。此外,大部分代码没有遵循现代可重用性准则,因此仍然需要许多人月——即使对于有经验的开发人员——来(重新)实现每个应用程序。
嵌入式运动控制器已经克服了软件障碍。这些单芯片器件集成了强大的处理器内核和专门设计用于加速运动控制算法的专用硬件逻辑。由于大多数嵌入式开发人员都不是运动学或电机物理方面的专家,因此这些设备带有一个电机控制和运动控制功能库,可以通过标准应用程序编程接口 (API) 访问这些功能库。这种方法允许设计人员为他们的 3D 打印机、真空清洁机器人或生物分析仪提供高级功能——例如加速整形、微步进和步进噪声抑制——而无需成为运动物理专家。
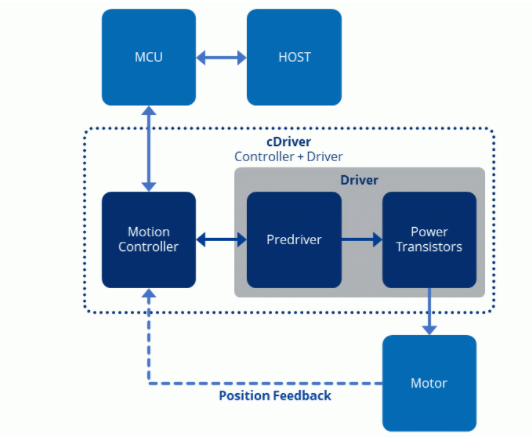
图 2:越来越多的运动控制功能被简化为单芯片解决方案,例如 TRINAMIC 将运动控制器和电机驱动器集成到 cDriver 中。(来源:TRINAMIC)
大胆的开发周期
嵌入式运动控制器进一步简化了开发周期,因为 (a) 它们的开发平台通常设计为与许多常用于传统嵌入式系统的软件工具兼容,以及 (b) 因为有大量的开源参考代码库他们支持。因此,开发人员可以从现有的 Java、C/C+/C# 和 Linux 代码库构建其运动控制应用程序的基础,并将大部分精力集中在 5% 到 10% 的代码上他们的设计。
由于嵌入式运动控制器将其关键功能封装在预先验证的芯片和软件中,这部分开发周期从算法开发、实施和测试的多个周期减少到设置几个参数并将代码导出到您自己的固件。因此,生物测定移液机器人或高速部分控制食品分配器的开发工作流程与非机电嵌入式应用的开发流程没有太大区别。
从胡克船长到钢铁侠:真实世界的成功故事
先进假腿的最新发展提供了一个生动的现实例子,说明嵌入式运动控制器如何加速创新机电产品的开发。2冰岛制造商 Össur 是主动假肢技术的市场领导者,开发了第一个批量生产的假肢腿,该假肢腿具有电动膝关节和踝关节。它在 2016 年 Cybathlon 3 上首次亮相,这是一项由苏黎世联邦理工学院组织的国际比赛,其中残疾选手使用最先进的辅助技术——如机器人假肢、脑机接口和动力外骨骼——来完成日常生活任务。
该项目的目的是创造一种新型假肢,以栩栩如生的方式移动,并为用户提供舒适、踏实和机车效率。肢体的两个动力关节都依赖于由TRINAMIC Motion Control 4开发的嵌入式运动控制器来生成复杂的运动,并最有效地利用肢体的有限电池容量。
控制器丰富的硬件运动控制功能和开发平台的经过验证的应用软件的补充消除了与控制器固件开发相关的许多风险,并缩短了验证和测试通常所需的时间。控制参数只需根据电机和设备应用的独特要求进行调整。
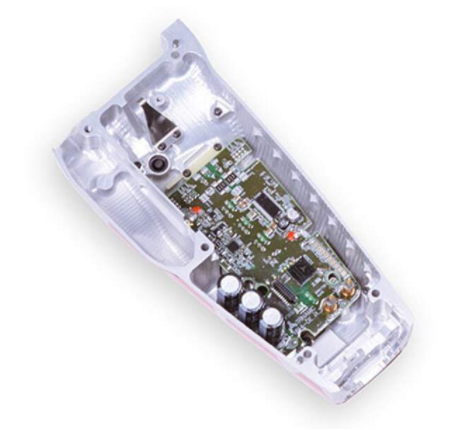
图 4:通过专业地对齐嵌入式运动控制,进一步小型化允许具有自定义外形的强大 PCB,例如 Össur 的 POWER KNEE 中使用的 PCB。(来源:TRINAMIC)
消除了通常与运动控制开发相关的许多步骤,使设计团队能够在短短五个月内创建、调试和验证肢体定制电机控制器系统的功能。这有助于按时按时完成雄心勃勃的开发计划,以成功参加 2016 年在苏黎世举行的 Cybathlon(观看参考文献 5 中的 YouTube 视频,了解 Power Knee 的运行情况)。虽然 Power Knee 的快速上市时间将意味着 Össur 获得更大的利润,但这项新技术创造的真正财富是它将为用户提供的自由和性能。
-
什么是嵌入式运动控制2022-05-31 3563
-
基于OMAP平台的嵌入式运动控制器设计资料分享2021-12-24 1845
-
如何通过LabVIEW FPGA加速嵌入式系统原型化?2021-05-06 1590
-
嵌入式运动控制器发展中的优缺点分析2021-03-30 3812
-
嵌入式运动控制器的优缺点2019-07-23 4483
-
基于ARM与DSP的嵌入式运动控制器设计详解2018-06-24 8374
-
嵌入式运动控制模块设计2018-02-12 845
-
嵌入式运动控制器设计2018-02-08 1821
-
GUS系列嵌入式运动控制器规格及尺寸图2017-10-12 1481
-
ARM与PCL6045B的嵌入式运动控制器设计2010-05-11 1959
-
基于ARM和MCX314A的嵌入式运动控制器2009-08-04 737
-
基于嵌入式运动控制器系统的设计与开发2009-07-30 575
-
基于ARM芯片的嵌入式运动控制系统设计2009-07-07 547
-
嵌入式同步运动控制器在飞剪系统中的应用2009-07-02 1106
全部0条评论

快来发表一下你的评论吧 !
