

图像的点云是如何拼接在一起的?
描述
理解好图像的点云拼接,需要从相机的模型说起。理解相机的成像原理之后,便可更为深刻的理解图像的点云如何拼接在一起。
首先说下相机的概念与原理。
相机概念与原理
相机的作用:将三维世界中的坐标点(单位为米)映射到二维图像平面(单位为像素)。
通常我们见到的相机都是针孔相机,但是不是简单的 针孔,还有透镜的畸变存在,所以在做图像处理时要进行畸变校正。
由于畸变的存在,我们在使用相机之前都要进行相机标定。
目的就是求出内参对于简单的应用求出径向畸变和切向畸变就够了。
所谓的外参就是相机的位姿。
有了外参、内参、图像、深度信息 便可以把图像中的点,转到世界坐标系下,并带有RGB的颜色。就形成了所谓的点云。
相关的公式也很好理解 ,就是通过相似三角形的原理。
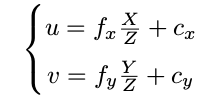
注意其中fx 、fy、 cx 、cy也就是相机的内参了。在相机出厂时会给出。
理解了相机的概念与原理,来编辑代码实现下。
Code实现
全部代码
先放上全部代码,再进行分段讲解
代码讲解
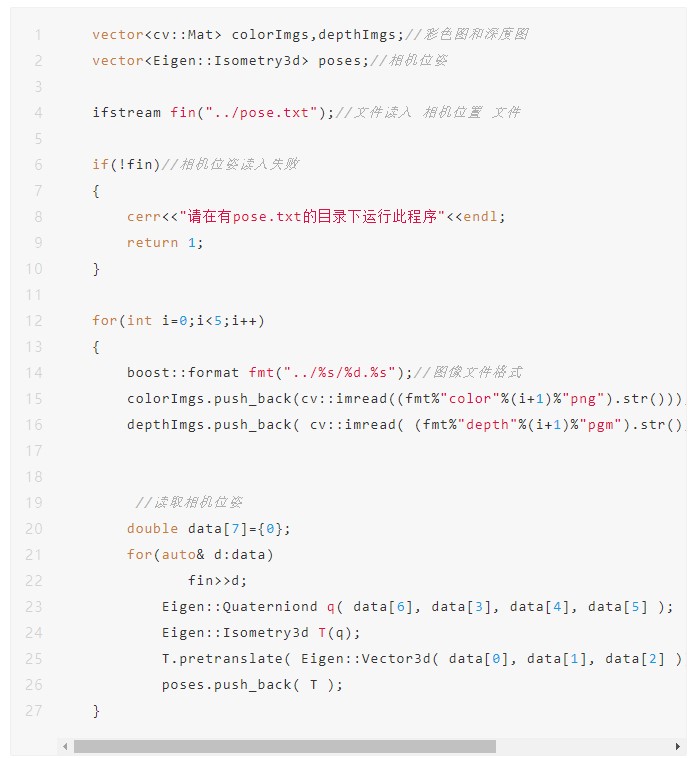
读取对应路径下的彩色图像、深度图像、相机的位姿。
上面说了,有了这三个量再加上相机内参,就可以得到点云。
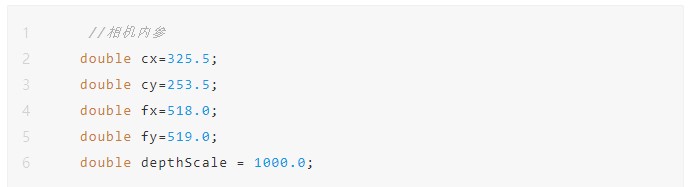
//相机内参
传说中的相机内参
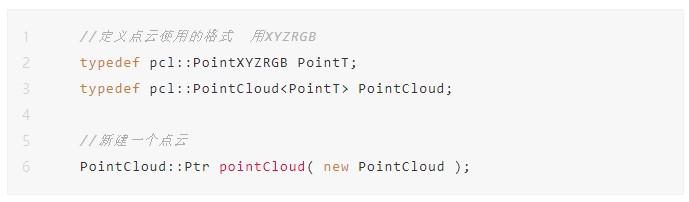
//定义点云使用的格式
声明pcl的格式创建一个点云,然后开始for循环处理每一张图片和对应的深度图片与相机位姿。


得到要处理的彩色图像深度图像对应的pose,然后for循环处理每一个像素。
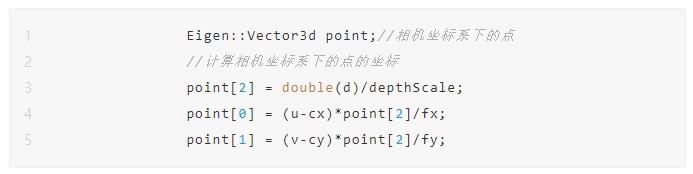
得到深度信息
通过:
这个公式得到相机坐标系下的 x,y,z

相机坐标系下的点通过坐标变换转到世界坐标系下。
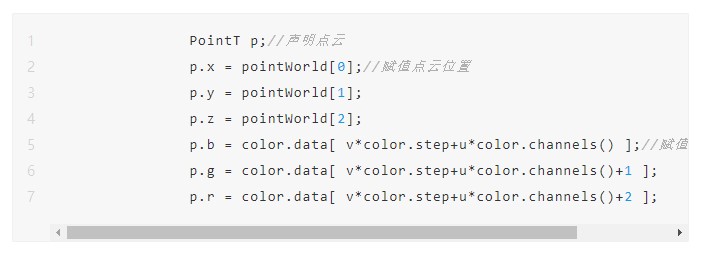
赋值点云的坐标与颜色。

保存成点云文件。
责任编辑:lq6
-
模拟地与数字地可以接在一起吗?2012-03-22 4806
-
怎么把一个元件的多个原理图连接在一起?2013-12-30 6346
-
红外接收头可以并联接在一起么?2014-03-23 7327
-
zigbee 怎么跟gps连接在一起2017-06-01 3745
-
请问铺铜地和过孔怎么连接在一起2019-02-20 7443
-
28335与W5300如何连接在一起2019-07-27 4387
-
请问51单片机串口可以和蓝牙模块链接在一起做什么?2023-10-20 676
-
AD7606的AGND和VXGND是否一定要接在一起?2023-12-14 728
-
用焊接在一起的PCB重建2.5D凸轮2023-06-08 500
-
如何将两个16*2 LCD与arduino连接在一起2023-06-30 614
-
模拟地和数字地可以接在一起吗2023-08-27 2536
-
铜线和铝线接在一起会发生什么?有哪些优缺点?2023-11-22 11575
-
作为导线,铜线和铝线有何区别?可以接在一起吗?2024-02-18 15207
-
模拟地和电源地能接在一起吗2024-09-15 5946
-
隔离电源的地能接在一起吗,隔离电源能不能直接共地使用2024-10-01 16137
全部0条评论

快来发表一下你的评论吧 !
