

嵌入式测控系统中数字滤波算法的实现
嵌入式操作系统
描述
嵌入式测控系统中数字滤波算法的实现
0 引言
模拟信号都必须经过A/D转换才能被嵌入式控制器接收。但在干扰作用于模拟信号之后,其A/D转换结果往往会偏离真实值。因此,仅采样一次是无法确定该结果是否可信的,而必须多次采样,才能得到一个A/D转换的数据系列,然后通过某种处理,才能得到一个可信度较高的结果。这种从数据系列中提取逼近真值的软件算法,通常称为数字滤波算法。相对于硬件滤波,数字滤波的优越性在于其无需硬件且可靠性高,尤其对频率很高或很低的信号进行滤波。此外,由于对多输入通道可共用一个滤波程序,故可大大降低产品成本。
1 嵌入式测控系统中常见的数字滤波算法
1.1 限幅滤波
首先根据被测对象确定相邻两次采样所允许的最大差值△Y,然后在每次采样后和上次有效采样值进行比较,如果变化幅度不超过△Y,则本次采样有效;否则,本次采样值被视为干扰而放弃,而以上次采样值为准。其原理可用如下公式表示:
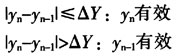
其中,yn为第n次采样值,yn-1为第(n-1)次采样值。
实现上述过程的参考程序(返回有效的采样值)如下:
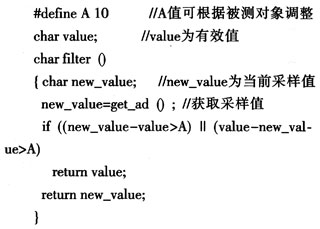
限幅滤波主要用于处理变化比较缓慢的数据,如温度、湿度、液位等。该方法使用的关键是要选取合适的门限△Y。△Y通常可根据经验数据获得,必要时也可由实验得到。
1.2中值滤波
这种滤波方式一般对目标参数连续采样N次(N一般为奇数),然后把N次采样值进行排序,再取中间值作为有效值。对于变化很慢的参数,也可以增加采样次数。而对于变化较为剧烈的参数,此法不宜采用。其参考程序如下:

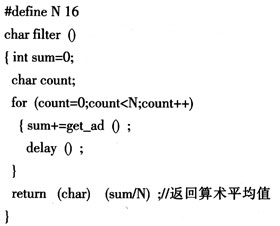
1.3算术平均滤波
该算法对目标参数先进行连续采样,然后求其算术平均值作为有效采样值。该算法适用于对具有随机干扰的信号进行滤波。这种信号的特点是有一个平均值。信号在某一数值附近上下波动。信号的平滑程度完全取决于采样次数N,采样次数越多,平滑效果越好,但系统的灵敏度也会下降。为方便求平均值,N一般取4、8、16之类的2的整数次幂,以便系统用移位法来代替除法。其参考程序如下:
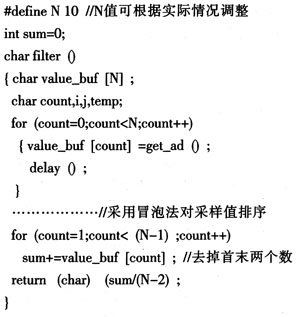
1.4去极值平均滤波
算术平均滤波不能消除明显的脉冲干扰,而只是将其影响削弱。由于明显干扰会使采样值远离其真实值,因此可以比较容易地将其剔除,而不参加平均值计算,从而使平均滤波的输出值更接近真实值,这就是去极值算法,又称为防脉冲干扰平均值滤波算法。该方法的原理是连续采样N次,并将其累加求和,同时找出其中的最大值和最小值,再从累加和中减去最大值和最小值,再按N-2个采样值求平均,即可获得有效采样值。为方便求平均值,N-2应为2、4、8、16,故N常取4、6、10、18。其参考程序如下:
1.5加权平均滤波
算术平均滤波和去极值平均滤波均存在平滑性和灵敏性的矛盾。因为,采样次数太少,平滑效果差;采样次数太多,灵敏度下降,对参数的变化趋势不敏感。为协调两者的关系,可采用加权平均滤波。即对连续N次采样值分别乘上不同的加权系数之后再求累加和。加权系数一般先小后大,以突出后面若干采样的效果,来加强系统对参数变化趋势的辨识。各个加权系数均应是小于1的小数,且应满足总和等于1的约束条件。这样,加权运算之后的累加和即为有效采样值。为方便计算,可取各加权系数均为整数,且总和为256,加权运算之后的累加和再除以256后便是有效采样值。其参考程序如下:

1.6滑动平均滤波
以上介绍的各种平均滤波算法具有一个共同点,即每取得一个有效采样值都必须连续进行若干次采样,这些方法在采样速度较慢(如双积分型A/D转换)或目标参数变化较快时,系统的实时性往往不能得到保证。而滑动平均滤波算法只采样一次,它将这一次采样值和过去的若干次采样值一起求平均,然后所得到的有效采样值即可投入使用。这样,如果取N个采样值求平均,则RAM中必须开辟N个数据的暂存区。每新采集一个数据便存入暂存区,同时去掉一个最老的数据,以保持这N个数据始终是最近的数据。这种数据存放方式可以用环形队列数据结构来实现。其参考程序如下:

1.7低通滤波
将普通硬件RC低通滤波器的微分方程用差分方程来表示,便可用软件算法来模拟硬件滤波功能。经推导,对于低通滤波算法有:

式中Xn为本次采样值;Yn-1为上次的滤波输出值;α为滤波系数,其值<<1;Yn为本次滤波输出值。这种算法对变化缓慢的物理量是很有效的。但应注意一点,它不能滤除高于二分之一采样频率的干扰信号。比如采样频率为2 Hz,则对1 Hz以上的干扰信号通常应配合硬件滤波电路来滤除。该方法的参考程序如下:
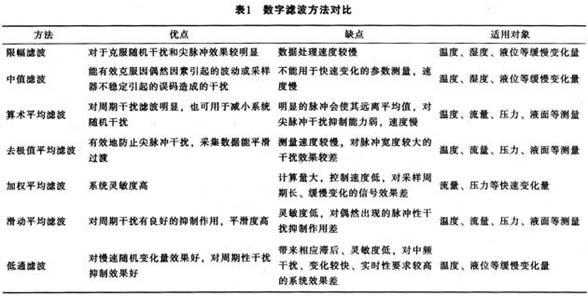
2各种数字滤波方法对比
数字滤波的方法多种多样,表1给出了几种数字滤波算法的优缺点和适用对象。
3 结束语
基于嵌入式测控系统的数字滤波方法多种多样,因此,在选择滤波方法时,首先要考虑微控制器的存储量、运算时间、运算能力以及实时性是否满足实际要求。然后再根据主要的干扰源(对系统的测试精度影响最大的干扰源)和测试对象的特点来选择合适的滤波方法。
-
软件算法实现数字滤波问题2022-01-20 1308
-
采用软件算法实现数字滤波2022-01-18 1648
-
介绍几种嵌入式常用滤波算法的matlab实现2021-12-21 1601
-
嵌入式系统中数字滤波的算法及软件流程2021-07-30 1036
-
在PSoC3和PSoC5系统中如何使用嵌入式数字滤波?2021-06-07 1516
-
嵌入式测控系统中常见的数字滤波算法有哪些?2021-04-12 1414
-
嵌入式测控系统的数字滤波方法有什么?2020-03-05 1397
-
嵌入式测控系统中数字滤波方法有什么?2019-10-23 3176
-
如何在嵌入式测控系统中实现数字滤波算法?2019-08-02 1129
-
浅析嵌入式测控系统的数字滤波算法2019-07-29 1551
-
基于嵌入式测控系统的数字滤波方法介绍2019-07-26 1290
-
嵌入式测控系统中数字滤波算法的实现2016-05-16 406
-
【图书分享】《嵌入式系统软件设计中的常用算法》2014-03-13 46991
全部0条评论

快来发表一下你的评论吧 !
