

探究精确的多相机同步技术
电子说
描述
IRIG时间码发生器的作用是为所有同步网卡(Sync NIC)提供稳定且相等的时间源,而Sync NIC反过来会对来自所有相机的帧加时间戳,然后将这些帧连同时间戳一起传递给应用层,具有Myricom MVA解决方案的低CPU占用率/低延迟的特点。
使用这种方法可以获得与基于IEEE1588解决方案相当的精度。这种操作的优势是不使用在高精度系统中常用的网络交换机。通常,在这些案例当中,一台相机将通过交换机为其他相机提供时间信息,而PC则只用进行帧处理。然而对于超高速10G应用程序,交换机可能非常昂贵。此外,还可能会为具有强可靠性要求的系统增加另一个新的故障点。
与外部触发相比,这种解决方案的其他优势是消除了在传递触发信息的相机之间运行的线缆。此外,IRIG B往往可以在许多系统中使用,因此它只是将IRIG B信号补丁到同步网卡中,而增加的成本很少。
该解决方案可以使用SFP+布线选项,包括距离大于10m的光纤连接和距离小于10m或更短的直接连接。接下来将详细介绍实现同步的过程:
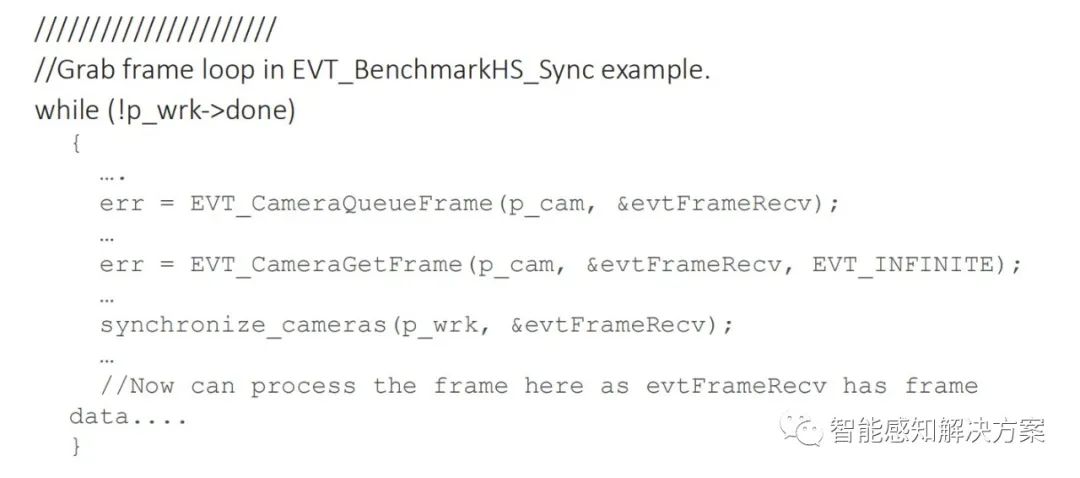
上面的示例代码(来自 EVT_BenchmarkHS_Sync eSDK 示例)为清晰可见进行了简化,在一个软件线程中运行,为每个相机启动一个线程。
代码以标准方式排列并获取帧,然而,当获取到这些帧时,帧结构的相关时间戳字段在synchronize_cameras()中使用,以确定每个帧的时间偏移,该时间偏移基于Myricom sync NICs接收到的帧的时间戳。通过计算这些时间偏移,适当的时间偏移校正被写回相机以校正任何时间偏移,并且所述偏移在相机发送的下一帧上立即生效。
该示例启动相机采集,一旦相机接收到第一帧,就会计算和校正主要偏移。从那时起,以预定间隔循环次偏移计算和校正。 此外,代码可以配置为以不同的时间间隔执行此同步,以对同步精度进行编程控制。
蓝色块表示相机C1-C4的曝光。橙色块表示给定相机的曝光与最慢的相机(在本例中为相机C4)之间的偏移时间。同步过程是确定橙色块的偏移量,并将适用的校正偏移量写入“早期”相机,以通过上面绿色显示的这些校正偏移量延迟下一帧的开始。
应用偏移量后,所有相机现在都同步并同时开始曝光。此插图是较大规模的偏移校正,在首次启动相机流式传输时可能会出现。
当涉及多台PC时,可以利用计算机之间较低带宽的链路(例如标准网络)在现在运行在不同PC上的主线程和从线程之间传递时间戳和计算出的偏移校正信息。
结合各种布线选项,该解决方案是最灵活、成本低且性能优化的超高速同步相机应用解决方案。
通过SFP 布线(光纤、直接连接)连接到Myricom Sync NIC的虹科EVT相机
双端口同步NIC,在一台或多台 PC 中具有 SMB IRIGB00X 输入
IRIGB00X时间码发生器使用GPS或基于内部的时间码
编辑:jq
- 相关推荐
- 热点推荐
- 相机
-
IMU+多相机高速联合自动标定方案2025-10-23 1883
-
基于多相滤波结构的雷达信号检测技术2012-08-20 2239
-
求帮忙考虑一个远距离多相机同步的解决方案2022-08-06 4908
-
多相同步整流BUCK电路2011-05-19 3505
-
关于任意多相机系统的SLAM重设计2021-01-07 2641
-
基于多相机捕捉系统下的通用物体运动捕捉方法2021-06-25 887
-
一文解析多相机视觉系统的难点及应用2023-02-03 1582
-
【虹科】如何借助PTP来做高精度相机同步?2021-10-28 2714
-
同步调相机的工作原理2023-09-21 16946
-
友思特分享 车载同步技术创新:多相机系统如何实现精准数据采集与实时处理?2024-10-16 2072
-
用于任意排列多相机的通用视觉里程计系统2024-12-13 1644
-
康谋方案 | BEV感知技术:多相机数据采集与高精度时间同步方案2025-02-06 4475
-
Spinnaker 4 SDK助力扩展多相机成像系统2025-06-06 1123
-
Simcenter STAR-CCM+多相CFD仿真:自信对复杂的工业多相应用精确建模2025-06-18 1434
-
多相电源控制利器——NCV81277A多相同步控制器深度解析2026-06-02 286
全部0条评论

快来发表一下你的评论吧 !
