

RTK?PPK?RTK与PPK的区别在哪?到底该怎么选?怎么找对合适的定位方法
军用/航空电子
描述
前言:我们经常在选购GNSS产品时,看到单点、RTK、静态等等不同的精度指标,而且各精度指标差异还非常大,这些不同指标到底代表了什么,我们到底该怎么用,怎么选?以下我们各工作指标的技术原理出发,进行对比分析,找出更适合我们工作应用的定位方法。
1,单点定位
单点定位,顾名思义,通过唯一的GNSS接收机来确定位置。用一台GNSS接收机,接收卫星传递的各种信号,包括卫星的伪距、星历、时间等等各种信息;接收机接收到这些信号后,根据内置的GNSS芯片,进行处理,得到全天候,近地表任何地点实时的三维坐标、速度以及时间。
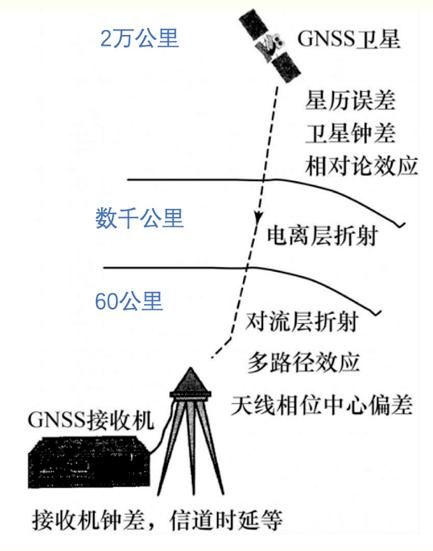
不过由于信号传递过程中,误差较多,一般在高精度领域单点精度不高,普遍在米级精度,仅仅满足导航需要。
2,RTK工作原理
RTK(Real - time kinematic)是一种实时动态差分技术,一般由GNSS接收机、数据传输系统、实施动态测量的软件系统三部分组成。RTK测量技术是以载波相位观测量为根据,有快速高精度定位功能的载波相位差分测量技术,它能够实时获得测站点在指定坐标系中的三维定位结果,且具有厘米级的定位精度。
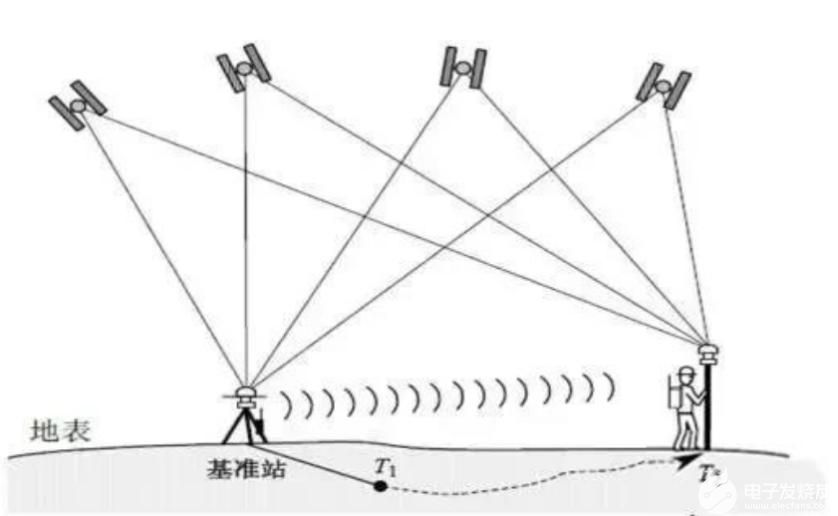
RTK测量的工作原理是:将一台接收机置于基准站上,另一台或几台接收机置于载体(称为移动站)上,基准站和移动站同时接收同一时间、同一GNSS卫星发射的信号,基准站所获得的观测值与已知位置信息进行比较,得到GNSS差分改正值。然后将这个改正值通过无线电数据链及时传递给共视卫星的移动站精化其GNSS观测值,从而得到经差分改正后移动站较准确的实时位置。
目前主流的RTK厂商水平定位精度可达±(8+D*10-6)mm,高程精度可达 ±(15+D*10-6)mm。基站和移动站之间的数据通讯主要有无线电台和网络,无线电台信号稳定,网络传输信号距离远,各有优点。
3, PPK工作原理
PPK(Post-Processing Kinematic,GNSS动态后处理差分)技术的工作原理是利用一台进行同步观测的基准站接收机和至少一台流动接收机,对GNSS卫星进行同步观测;也就是基准站保持连续观测,初始化后的流动站迁站至下一个待定点,在迁站过程中需要保持对卫星的连续跟踪,以便将整周模糊度传递至待定点。
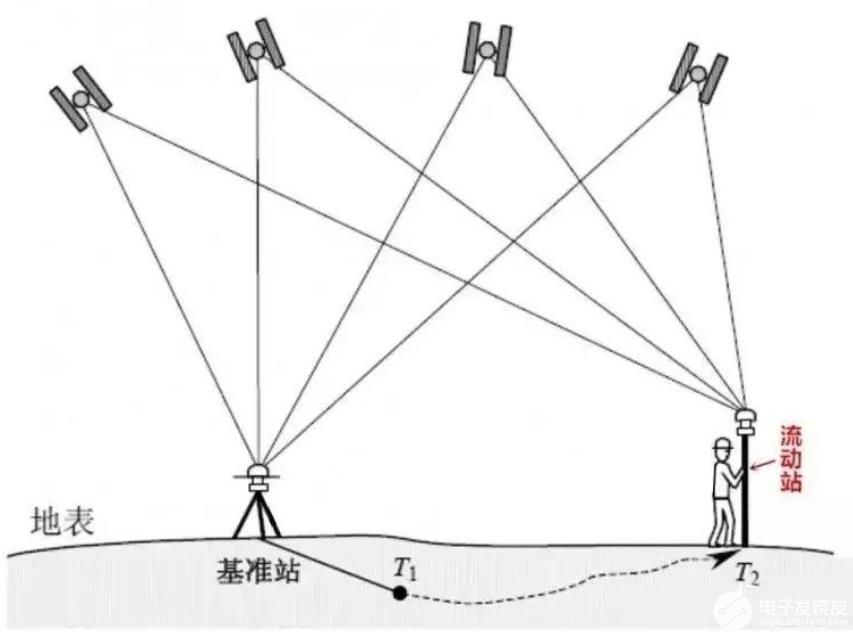
基准站和流动站同步接收的数据在计算机中进行线性组合,形成虚拟的载波相位观测量,确定接收机之间的相对位置,最后引入基准站的已知坐标,从而获得流动站的三维坐标。
PPK技术是最早的GNSS动态差分技术方式(又称半动态法、准动态相对定位法、走走停停(Stop and Go)法),它与RTK技术的主要区别在于:在基准站和流动站之间,不必象RTK那样,建立实时数据传输,而是在定位观测后,对两台GNSS接收机所采集的定位数据进行测后的联合处理,从而计算出流动站在对应时间上的坐标位置,其基准站和流动站之间的距离没有严格的限制。它的优点是定位精度高、作业效率高、作业半径大、易操作。
4,RTK与PPK的差异
RTK与PPK作为目前主流的测量方案,有着许多相似的地方:
都采用基准站+流动站的工作模式
作业前都需要初始化(RTK初始化时间较短,一般在一分钟内,部分厂家可做到10S以内,PPK大多10分钟以上)
都能达到厘米级精度。
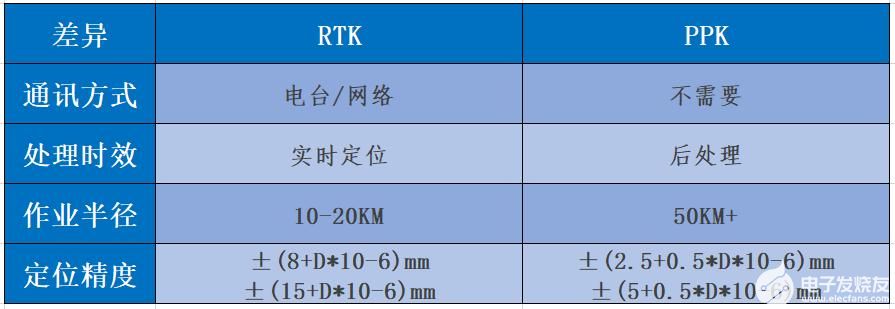
同样的,两者也有着非常鲜明的差别,主要差别如下所示:
5,选择合适的作业方式
根据以上不同作业方式的对比,相信大家对于各功能也有了大致的了解,基于不同的工作场景,可以选择自己工程合适的机型与作业方式。
以传统测量测点、放样为例,基本精度要求保证在1-2cm,定位要求实时、连续稳定,大多会采用集成测量软件的测地型GNSS接收机,一杆在手,测量无忧!
对于车载高精度导航定位需求,也是要保证起连续性、实时性;当然,车载运动中无法避免的卫星遮挡,例如隧道、高架等,可以选用GNSS+IMU导航型接收机,一路随行,随时畅联!
针对于无人机等场景,飞行速度快,需求定位频率高,作业巡检范围广,设备载重要求小,可以选择更加轻便的定位模块,搭配无须集成通讯链路的PPK工作方式,信号拉满,hold住全场!
-
CPK和PPK两者的区别份资料分享2018-08-24 3592
-
支持RTK的两款高精度定位模块2020-03-10 3297
-
基于A40i平台在RTK接收主机上的应用2021-02-21 2923
-
manual中rtk算法如何优化?2021-09-27 1749
-
TAU1312 多系统多频 RTK 定位模块2023-09-06 1381
-
TAU1308 多系统 RTK 定位模块2023-09-07 1487
-
GPS RTK转换参数求解方法2010-04-26 2367
-
什么是RTK技术?2009-08-06 8065
-
RTK与PPK技术在电力工程中的应用2018-02-27 1268
-
Tersus GNSS无人机PPK解决方案优势解析2018-09-01 5345
-
RTK和GPS定位的区别在哪里?2021-05-08 3126
-
如何对RTK高精度定位算法进行验证2022-10-11 5932
-
您了解RTK技术吗?—— 揭秘GNSS中的定位技术2023-01-09 7199
-
“高精度”定位技术RTK,仅仅是差分GPS吗?2023-08-28 3360
-
【干货】户外定位:RTK和GPS有多大区别?2025-06-19 3876
全部0条评论

快来发表一下你的评论吧 !
