

2021i-VISTA自动驾驶汽车挑战赛在重庆正式开启
今日头条
描述
2021年8月19日,全球智能汽车领域的顶尖赛事——2021i-VISTA自动驾驶汽车挑战赛,在重庆正式开启。首日的赛程是被誉为赛事“人气王”的ADAS辅助驾驶系统挑战赛,其中的APS自动泊车挑战赛更是整个赛事的重头戏。本次APS自动泊车挑战赛设置了平行车位、垂直车位、斜向车位三种场景,这些都是驾驶者平时最常遇到的泊车场景。登场的多个品牌车型基本都出现失误,有的在侧方位停车时越过后方停车线,有的在垂直停车时没能准确识别车位。长安UNI-T2021款1.5T旗舰型从识别车位、执行操作,到完成泊车,三种场景都是一把入库,勇夺冠军。江淮汽车紧跟其后位列第二。
恰巧的是获得金银牌的两辆车型均搭配的是纵目科技的自动泊车产品。下面就由纵目科技的技术专家来详细的介绍,基于超声波和环视深度融合的纵目泊车环境感知系统。
APA系统经过几代的发展已经从最初的简单的超声系统到现在结合视觉对车位的检测,甚至有在开发的系统能够使用毫米波乃至激光传感器来识别车位和车位内的障碍物,当然这类系统还面临成本相对超声波和视觉系统较高而没法商品化的问题。
现在市场上常见的APA系统依旧是独立的超声系统或则独立的视觉系统,以及两者相结合的系统。而纵目在这次iVista测试中第一次推出了量产化的APA系统,深度结合了超声和视觉感知。
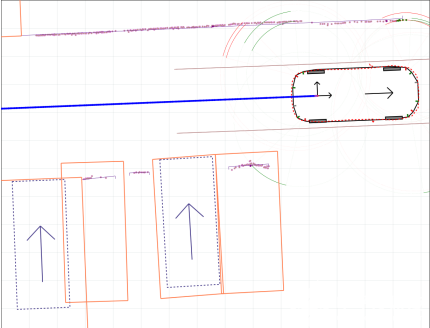
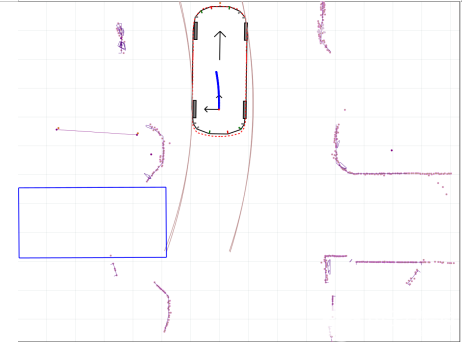
在APA场景中,首要考虑的是对环境的感知,也就是障碍物的位置和车位的位置,以下是纵目在APA开发中对iVista场景之一的检测结果。这个结果清晰显示出车位的位置,以及周围障碍物的位置,同时感知系统提供的障碍物的属性信息,也被用车位的构建和剔除。最终的结果有两个车位可以被用于泊入。系统最后选择的是距离最近的车位。
感知结果:
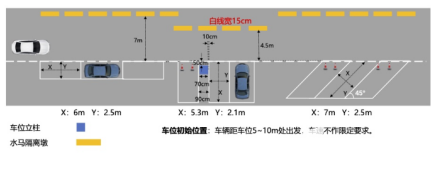
实际的摆设场景为中间垂直车位:
由于系统清晰知道障碍物的位置,车位类型和泊车最终的位置,这样就可以从一开始规划出一个优化的泊入路径,减少整个泊车时间。
其次,在泊入的时候,为了减少行车机械结构带来的累计误差,纵目开发对车位和障碍物的闭环检测功能,也就是在泊入车位的时候,始终对周围环境做检测,修正检测的结果,保证能够动态调整泊入路径。
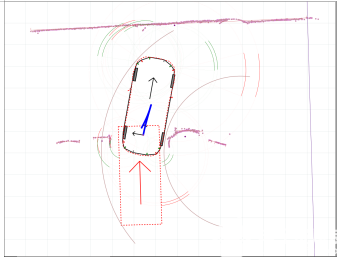
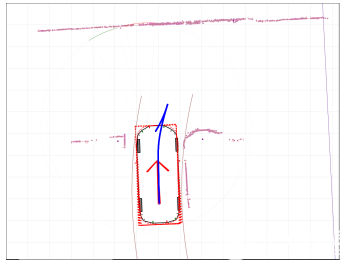
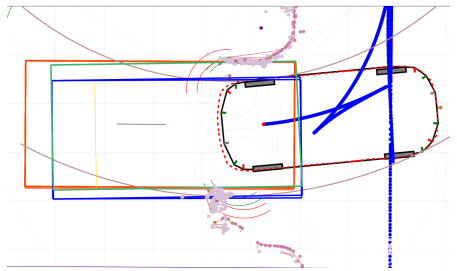
在APA系统中,车辆的定位,环境感知和规划控制始终是保证系统性能的三大基石。iVista-2021的比赛结果是对纵目当前一代APA系统最直接的评价,而在开发中的下一代APA系统中的环境感知,利用视觉提供新的检测信息结合超声波检测有针对性地提高对障碍物的轮廓和类型的感知能力,例如锥桶,挡轮器,方柱,车辆等等,这样更加有利于规划出合理的更接近人类行为的泊车路径。以下两图是改进后的检测能力。
纵目科技的泊车产品目前处于领先地位,希望纵目科技未来能持续为人们带来更优秀的产品,发展好泊车产品,更好的服务社会。
fqj
-
谷歌的自动驾驶汽车是酱紫实现的吗?2011-06-14 4856
-
[科普] 谷歌自动驾驶汽车发展简史,都来了解下吧!2016-10-25 4407
-
自动驾驶的到来2017-06-08 7501
-
如何让自动驾驶更加安全?2019-05-13 3797
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2942
-
自动驾驶车的人车交互接口设计方案2020-07-30 3016
-
2018i-VISTA自动驾驶汽车挑战赛即将开启 各路大咖已就绪2018-08-05 5420
-
i-VISTA自动驾驶汽车挑战赛开赛,福特发布自动驾驶安全报告2018-08-20 4891
-
自动驾驶汽车在公共道路上行驶,但仍存异常驾驶行为2018-08-28 4456
-
i-VISTA自动驾驶汽车挑战赛在重庆举行2020-09-15 2847
-
一年一度的自动驾驶汽车挑战赛拉开帷幕2020-09-18 3078
-
大唐移动为i-VISTA自动驾驶汽车挑战赛提供车载融合网关2020-09-22 4900
-
自动驾驶浪潮袭来,汽车产业链面临重新洗牌2020-09-29 1007
-
i-VISTA自动驾驶汽车挑战赛华为MDC培训持续火爆中2021-08-06 2771
-
长安、江淮勇夺2021 i-VISTA自动驾驶汽车挑战赛金银牌2021-10-14 2034
全部0条评论

快来发表一下你的评论吧 !
