

Linux系统中图形显示方案
描述
FBDEV
Framebuffer device
社区参与度不高,基本转移到了DRM。
DRM/KMS
Direct Rendering Manager / KernelMode Setting
主流的图形显示方法,社区参与度高,支持图形系统精细化操作,基本形成了一套图显系统开发的生态标准。
V4L2
Video For Linux 2
主要用于视频捕获的应用场景,并且需要特定输出设备,对复杂图显控制器的支持不佳
DRM系统组成 2 kernel层面的DRM系统包含两大部分,一部分是图显设备的DRM抽象,另外一部分是图显设备的显存控制。涵盖了linux系统中DRM系统组成,kernel为用户层提供标准的DRM接口,在用户层依据DRM库构建各种图显协议,图显应用层基于这些中间件完成应用程序的开发。
##显存Framebuffer
申请的一块用于存储显示数据的内存区域,主要包括:
1)内存区域大小范围
2)内存中待显示数据的帧格式
3)内存中有效的区域,该部分是待显示数据
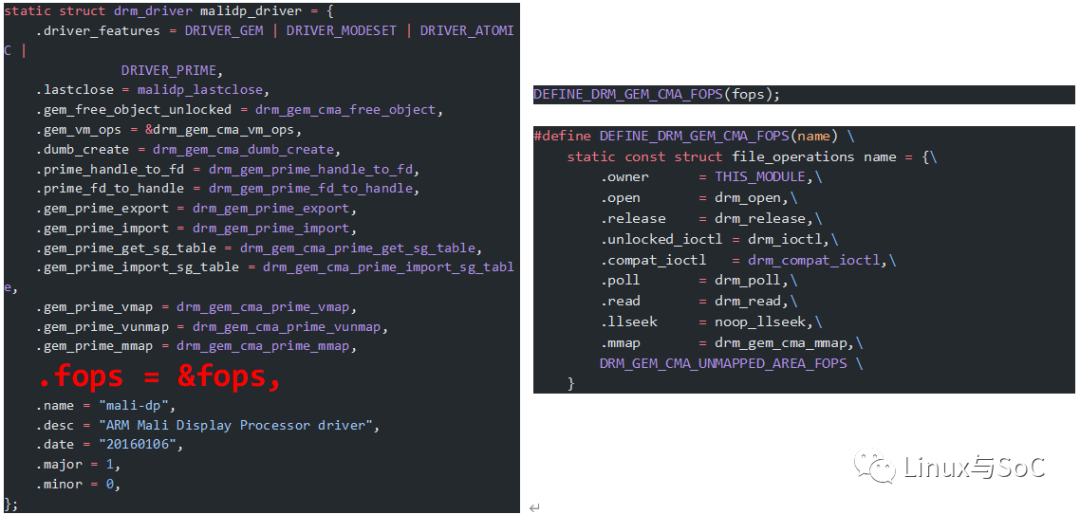
其实现方法主要有3种:
1)基于CMA的
drivers/gpu/drm/drm_fb_cma_helper.c
2)基于Scatter Gather
drivers/gpu/drm/tegra/
3)基于IOMMU
drivers/gpu/drm/exynos/exynos_drm_iommu.c
显存区域定义
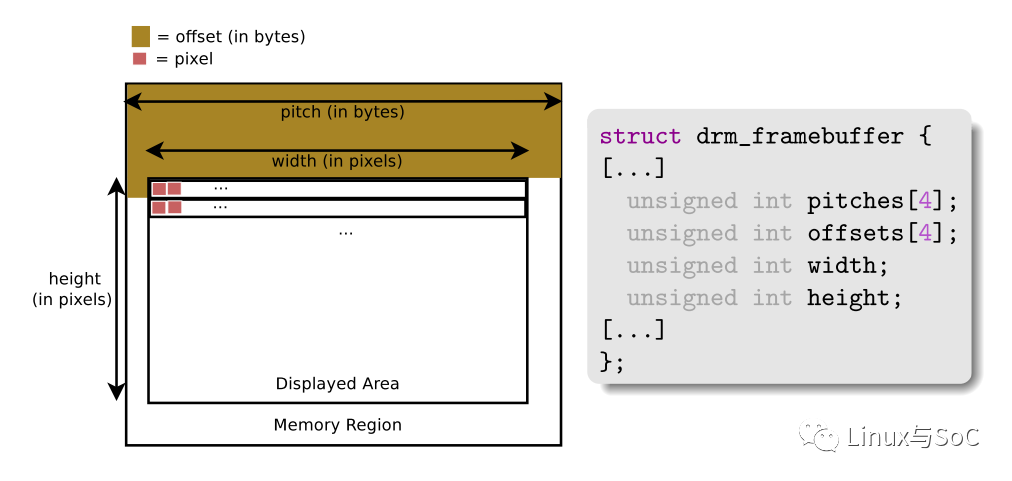
帧格式定义
支持的帧格式以FOURCC格式来呈现,其定义形式如下:
1/* 24 bpp RGB */
2#define DRM_FORMAT_RGB888 fourcc_code('R', 'G', '2', '4')
3#define DRM_FORMAT_BGR888 fourcc_code('B', 'G', '2', '4')
4
5/* 32 bpp RGB */
6#define DRM_FORMAT_XRGB8888 fourcc_code('X', 'R', '2', '4')
7#define DRM_FORMAT_XBGR8888 fourcc_code('X', 'B', '2', '4')
8#define DRM_FORMAT_RGBX8888 fourcc_code('R', 'X', '2', '4')
9#define DRM_FORMAT_BGRX8888 fourcc_code('B', 'X', '2', '4')
创建FRAME BUFFER
创建成功可在dev下看见fb设备

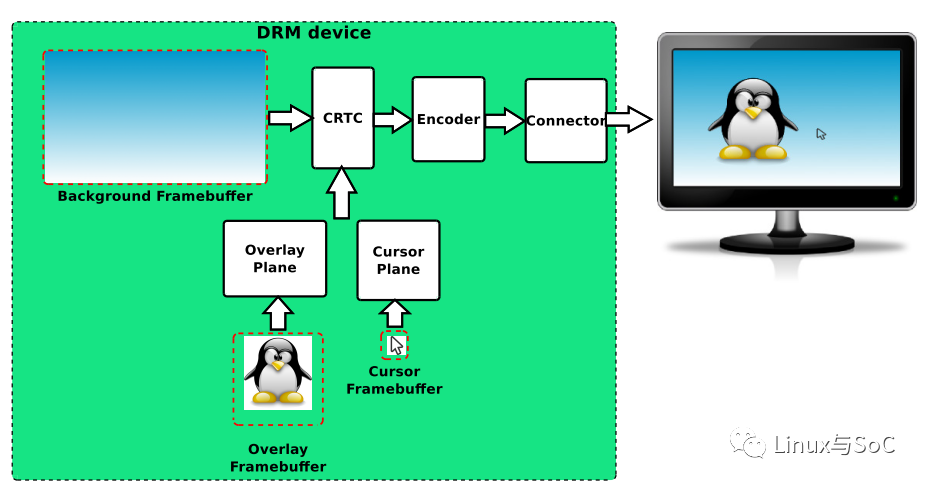
##CRTC
CRTC funcs
1static const struct drm_crtc_funcs ade_crtc_funcs = {
2 .destroy = drm_crtc_cleanup,
3 .set_config = drm_atomic_helper_set_config,
4 .page_flip = drm_atomic_helper_page_flip,
5 .reset = drm_atomic_helper_crtc_reset,
6 .atomic_duplicate_state = drm_atomic_helper_crtc_duplicate_state,
7 .atomic_destroy_state = drm_atomic_helper_crtc_destroy_state,
8 .enable_vblank = ade_crtc_enable_vblank,
9 .disable_vblank = ade_crtc_disable_vblank,
10};
CRTC helper funcs
1static const struct drm_crtc_helper_funcs ade_crtc_helper_funcs = {
2 .mode_fixup = ade_crtc_mode_fixup,
3 .mode_set_nofb = ade_crtc_mode_set_nofb,
4 .atomic_begin = ade_crtc_atomic_begin,
5 .atomic_flush = ade_crtc_atomic_flush,
6 .atomic_enable = ade_crtc_atomic_enable,
7 .atomic_disable = ade_crtc_atomic_disable,
8};
##PLANE
PLANE funcs
1static struct drm_plane_funcs ade_plane_funcs = {
2 .update_plane = drm_atomic_helper_update_plane,
3 .disable_plane = drm_atomic_helper_disable_plane,
4 .destroy = drm_plane_cleanup,
5 .reset = drm_atomic_helper_plane_reset,
6 .atomic_duplicate_state = drm_atomic_helper_plane_duplicate_state,
7 .atomic_destroy_state = drm_atomic_helper_plane_destroy_state,
8};
PLANE helper funcs
1static const struct drm_plane_helper_funcs ade_plane_helper_funcs = {
2 .atomic_check = ade_plane_atomic_check,
3 .atomic_update = ade_plane_atomic_update,
4 .atomic_disable = ade_plane_atomic_disable,
5};
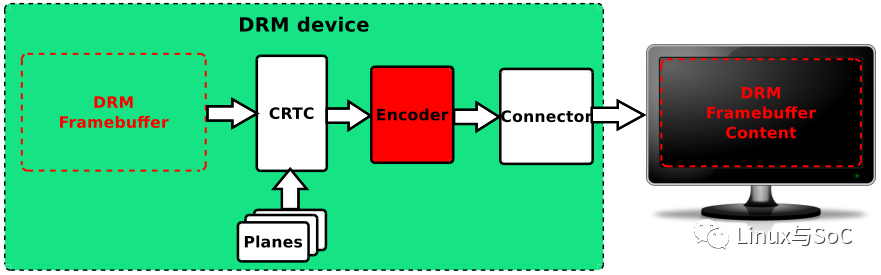
##ENCODER/CONNECTOR
ENCODER负责将CRTC输出的timing时序转换成外部设备所需要的信号的模块,如HDMI转换器。CONNECTOR 连接物理显示设备的连接器,如HDMI、DisplayPort、DSI总线,通常和Encoder驱动绑定在一起。
ENCODER/helper funcs
1static const struct drm_encoder_helper_funcs dw_encoder_helper_funcs = {
2 .atomic_check = dsi_encoder_atomic_check,
3 .mode_valid = dsi_encoder_mode_valid,
4 .mode_set = dsi_encoder_mode_set,
5 .enable = dsi_encoder_enable,
6 .disable = dsi_encoder_disable
7};
8
9static const struct drm_encoder_funcs dw_encoder_funcs = {
10 .destroy = drm_encoder_cleanup,
11};
CONNECTOR/helper funcs
1static const struct drm_connector_helper_funcs
2panel_bridge_connector_helper_funcs = {
3 .get_modes = panel_bridge_connector_get_modes,
4};
5
6static const struct drm_connector_funcs panel_bridge_connector_funcs = {
7 .reset = drm_atomic_helper_connector_reset,
8 .fill_modes = drm_helper_probe_single_connector_modes,
9 .destroy = drm_connector_cleanup,
10 .atomic_duplicate_state = drm_atomic_helper_connector_duplicate_state,
11 .atomic_destroy_state = drm_atomic_helper_connector_destroy_state,
12};
##ioctl注册
component组件系统 3kernel中的component框架是为了subsystem能够按照一定的顺序初始化设备而提出的架构。subsystem中由较多设备模块组成,而内核加载每个模块时间不定。则需要component框架来保证需最后初始化的设备加载前,所需设备全部加载完毕。在component中,包含两个基本概念,master和component。
master是设备树中的“超级设备(superdevice)”,负责管理该超级设备下的普通设备。component是由master管理的普通设备,要先初始化。
#初始化分为两部分
master即超级设备,执行probe使用component_master_add_with_match函数注册自己到component框架中。component即普通设备,执行probe使用component_add函数注册自己到component框架中。
##Master初始化
1static int kirin_drm_platform_probe(struct platform_device *pdev)
2{
3 struct device *dev = &pdev->dev;
4 struct device_node *np = dev->of_node;
5 struct component_match *match = NULL;
6 struct device_node *remote;
7
8 remote = of_graph_get_remote_node(np, 0, 0);
9 if (!remote)
10 return -ENODEV;
11
12 drm_of_component_match_add(dev, &match, compare_of, remote);
13 of_node_put(remote);
14
15 return component_master_add_with_match(dev, &kirin_drm_ops, match);
16}
##Component初始化
1static int dsi_probe(struct platform_device *pdev)
2{
3 struct dsi_data *data;
4 struct dw_dsi *dsi;
5 struct dsi_hw_ctx *ctx;
6 int ret;
7
8 data = devm_kzalloc(&pdev->dev, sizeof(*data), GFP_KERNEL);
9 if (!data) {
10 DRM_ERROR("failed to allocate dsi data.
");
11 return -ENOMEM;
12 }
13 dsi = &data->dsi;
14 ctx = &data->ctx;
15 dsi->ctx = ctx;
16
17 ret = dsi_parse_dt(pdev, dsi);
18 if (ret)
19 return ret;
20
21 platform_set_drvdata(pdev, data);
22
23 return component_add(&pdev->dev, &dsi_ops);
24}
##设备树定义
图显系统设备树定义要遵循component框架的定义,使得各个组件能够组成一个完成的拓扑结构。
1ade: ade@f4100000 {
2 compatible = "hisilicon,hi6220-ade";
3 reg = <0x0 0xf4100000 0x0 0x7800>;
4 reg-names = "ade_base";
5 hisilicon,noc-syscon = <&medianoc_ade>;
6 resets = <&media_ctrl MEDIA_ADE>;
7 interrupts = <0 115 4>; /* ldi interrupt */
8
9 clocks = <&media_ctrl HI6220_ADE_CORE>,
10 <&media_ctrl HI6220_CODEC_JPEG>,
11 <&media_ctrl HI6220_ADE_PIX_SRC>;
12 /*clock name*/
13 clock-names = "clk_ade_core",
14 "clk_codec_jpeg",
15 "clk_ade_pix";
16
17 assigned-clocks = <&media_ctrl HI6220_ADE_CORE>,
18 <&media_ctrl HI6220_CODEC_JPEG>;
19 assigned-clock-rates = <360000000>, <288000000>;
20 dma-coherent;
21 status = "disabled";
22
23 port {
24 ade_out: endpoint {
25 remote-endpoint = <&dsi_in>;
26 };
27 };
28};
29
30dsi: dsi@f4107800 {
31 compatible = "hisilicon,hi6220-dsi";
32 reg = <0x0 0xf4107800 0x0 0x100>;
33 clocks = <&media_ctrl HI6220_DSI_PCLK>;
34 clock-names = "pclk";
35 status = "disabled";
36
37 ports {
38 #address-cells = <1>;
39 #size-cells = <0>;
40
41 /* 0 for input port */
42 port@0 {
43 reg = <0>;
44 dsi_in: endpoint {
45 remote-endpoint = <&ade_out>;
46 };
47 };
48 };
49};
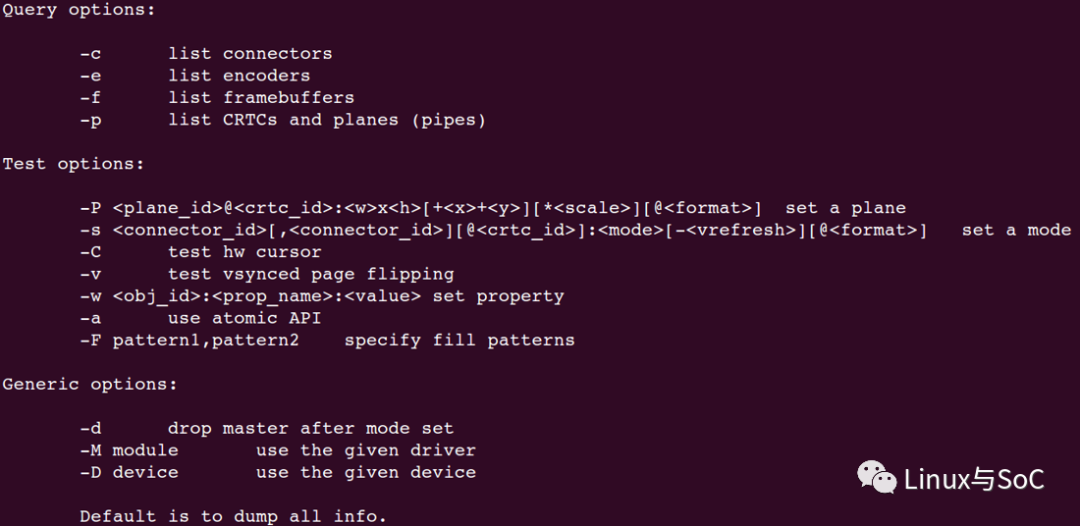
modetest
4是由libdrm提供的测试程序,可以查询显示设备的支持状况,进行基本的显示测试,以及设置显示的模式。
编辑:jq
-
Linux系统中的FBE实现方案和特点2023-11-29 2715
-
linux图形化界面设置ip2023-11-27 4865
-
基于FPGA和DSP的机载图形显示系统2021-06-08 2121
-
如何设计全姿态指引仪图形显示系统?2019-08-14 1454
-
嵌入式Linux系统图形及图形用户界面2019-04-25 2763
-
Microchip图形显示解决方案2018-06-07 3424
-
基于DaVinci平台和嵌入式Linux系统构建图形桌面环境详细中文资料2018-04-19 1409
-
基于FPGA的机载视频图形显示系统设计2017-11-30 986
-
基于linux的全彩LED显示屏脱机控制系统设计2013-09-24 5356
-
嵌入式Linux图形系统(GUI)快速参考手册2011-02-14 6026
-
图形点阵式液晶显示模块在冲击力监测系统中2010-01-15 1289
-
基于嵌入式Linux的图形界面显示系统的设计2009-08-11 893
-
嵌入式Linux中图形用户界面的研究与设计2009-06-13 567
-
图形点阵液晶显示的单片机开发系统的设计2009-05-27 607
全部0条评论

快来发表一下你的评论吧 !
