

如何用鸿蒙开发板轻松做一个报警器(内附教程)
描述
通过前面两篇贴子的介绍,相信大家已经掌握如何使用 Python 操作 GPIO 和 I2C 了。
那么今天我们可以更进一步,通过 Python 中的 GPIO 和 PWM 接口使蜂鸣器发声。
当然,如果只是实现这个功能就太无聊了,所以我们可以扩展一下,做个稍微有意思一些的东西。
嗯。。。想想做点啥呢?!翻箱倒柜一番之后,我找到了下面这块扩展板。
这是小熊派鸿蒙开发套件中的“智慧安防”扩展板,板子上搭配了一个红外传感器和一个蜂鸣器。
基于这个板子,可以开发一个简单的安防案例:当红外传感器有感应(有人靠近)时,触发蜂鸣器发出警告(发声)。
在开始之前需要先介绍一个新概念:脉冲宽度调制(Pulse Width Modulation),即:PWM。
这是一个属于硬件电路层面的概念,对于物联网开发来说不需要特别深入的对它进行研究,只需要掌握基本原理后应用到开发中即可。
简单的说,PWM 就是利用数字信号输出模拟信号的一种技术。众所周知,现代计算机系统是数字驱动的,即:所有计算机部件在高低电平的交替驱动下工作。
如果所有的外设都是数字的,那么事情就很简单了,直接 GPIO 连接就可以通信。
然而,有些外设就不是数字的,而是模拟的,需要接收模拟信号(如:正弦波信号),所以需要借助处理器使用 PWM 技术实现模拟信号。
基本原理如下:
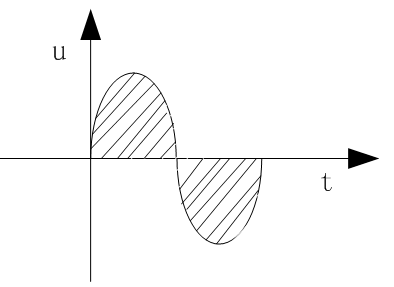
根据电工电子学老师的说法,如果需要产生这样的一个正弦波,可以用多个方波代替,其效果是相同的。
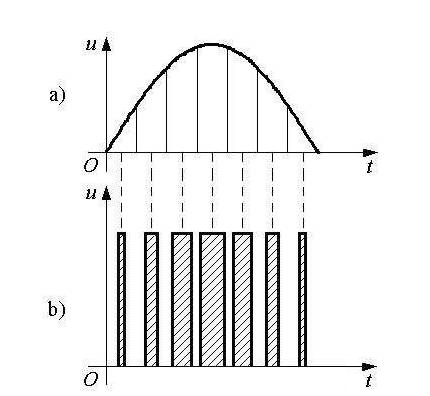
图 a) 中的正弦波可以用一个个幅值相同但是宽度不同的方波代替,如图 b) ,只要这些方波与 t 轴围起来的面积和原始正弦波与 t 轴围起来的面积相同即可。
有了上面的原理之后,接下来需要讨论的就是:如何调节出等效的方波?
为了解决这个问题,需要了解占空比的概念!占空比指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比。
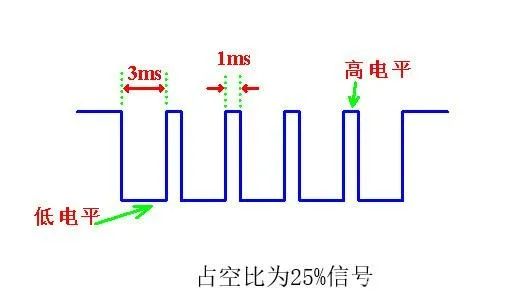
在上图中一个周期是 4ms ,而高电平在一个周期中的持续时间是 1ms,所以占空比为 25% 。
掌握了这些理论性的东西之后,就可以考虑如何实操的问题了:怎么实现 PWM 信号(方波信号)输出?
很幸运,Hi3861中自带了 PWM 模块,所以在代码层面只需要调用相关 API 接口向 PWM 模块设置必要参数,就可以输出需要的连续 PWM 信号(方波信号)。
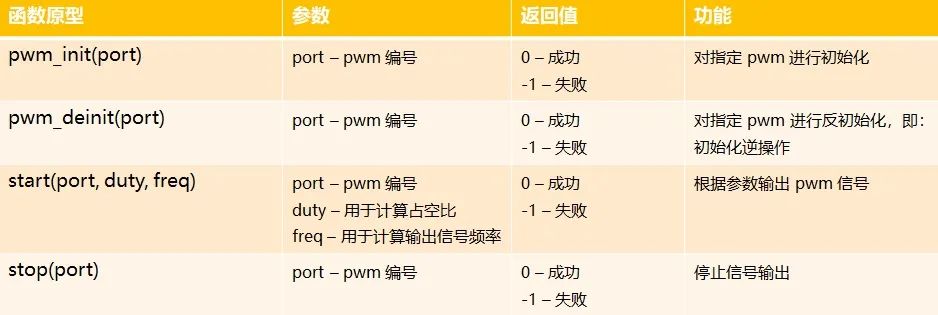
上面表格中的接口功能可谓一目了然,几乎可以做到“开箱即用”,唯一需要做解释的就是 start(port,duty,freq)这个函数。
port 表示 PWM 信号的输出通道编号,freq 用于控制 PWM 信号的输出频率,duty 用于指定占空比,占空比的值为 duty 和 freq 的比值。
Ok!有了这些铺垫,可以上代码了!
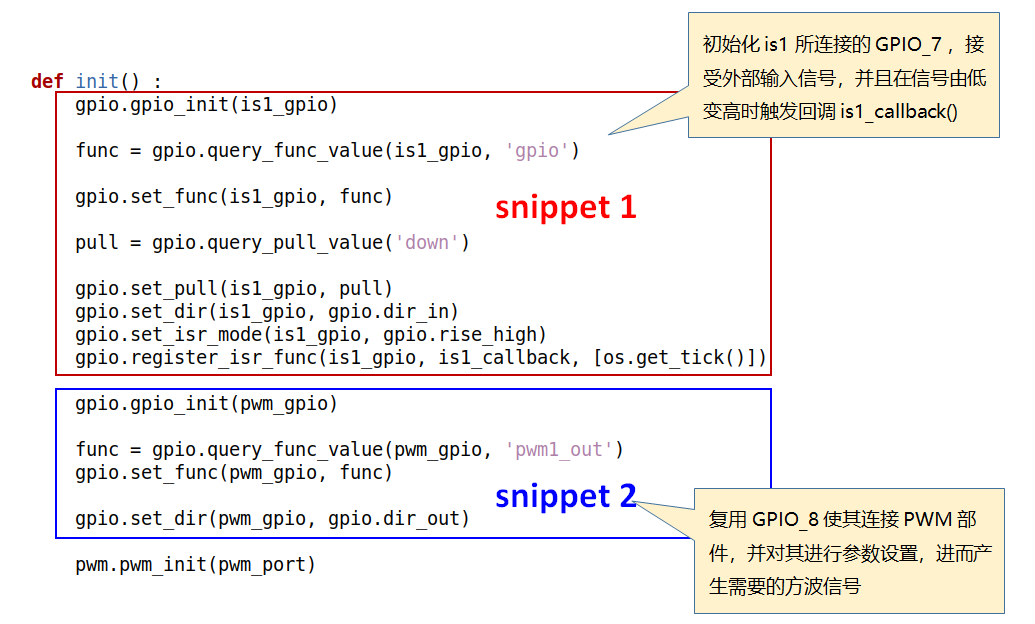
Snippet 1部分的代码先对 GPIO_7 进行初始化和功能设置,目的是接收 is1 也就是红外传感器的感应信号,当 Hi3861 接收到这个红外感应信号就会触发回调 is1_callback() 。
Snippet 2 部分的代码复用 GPIO_8 使其连接 PWM 模块,目的是对 PWM 进行参数设置。
这里可以更进一步的给大家科普一下 GPIO 和 PWM 的关系:在理论上可以直接用 GPIO 产生需要的方波信号,但现实中并不会这么做!
原因很简单,这么做会耗费大量的处理器资源,并且产生的方波信号频率有限。
所以,一般都会引入独立的 PWM 模块,处理器通过 GPIO 与这个模块连接在一起,从而能够对其进行参数设置。之后,具体产生方波的工作就由 PWM 模块完成了。
接下来,看看回调函数 is1_callback() 的实现。
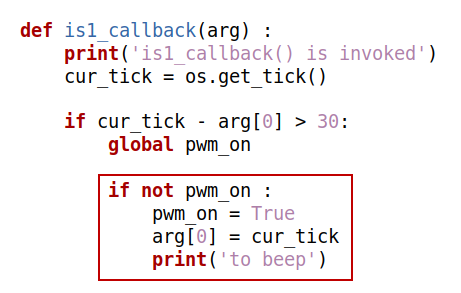
代码很简单,核心部分就是对变量 pwm_on 进行标记,即:当接收到红外感应信号的时候将 pwm_on 赋值为 True。
然后呢?然后在别处进行处理!
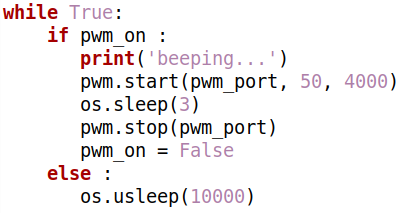
脚本文件的最后,可以看到处理 pwm_on 为 True 的代码,即:当 pwm_on 为 True 时,调用 start() 函数促使 1 号 PWM 通道产生方波信号。
而 1 号 PWM 通道连接的是一个蜂鸣器,产生方波信号的最终结果就是使得蜂鸣器发声。
整体流程如下:
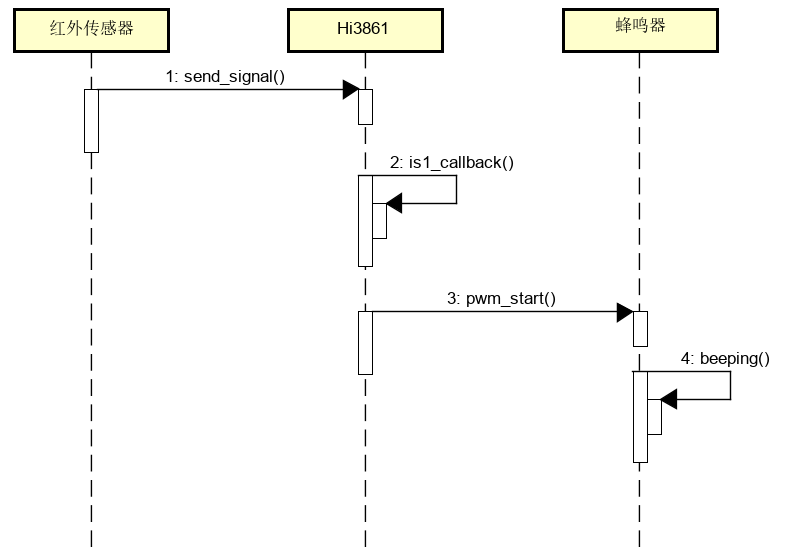
最终效果如下:
可以看到,当我靠近开发板时,红外感应器立即发送感应信号,进而触发蜂鸣器发声。
WOW!一个简单的安防系统就这么完成了!
PS:最新版 Python 引擎库能够支持几乎所有鸿蒙的外设接口,以及基础浮点运算。
感兴趣的同学可下载附件中的代码和文件自行编程尝试。
Enjoy It!
代码开源地址:
https://gitee.com/delphi-tang/python-for-hos
编辑:jq
-
微五科技CF5010RBT60开发板试用体验+气体报警器项目demo2025-08-05 1352
-
基于ESP8266与51单片机的震动报警器(车辆报警器)(简单向)2021-11-21 1589
-
如何用所学的鸿蒙知识做一个小应用2021-10-19 2606
-
电压监控报警器proteus设计2021-07-14 1724
-
一款简易报警器相关资料分享2021-04-23 2395
-
做一个在接受到邻居报警器报警后作出反应跟着器报警的声音识别设计?2020-05-10 1803
-
怎样制作火灾报警器2018-09-17 8601
-
求助:做一个振动报警器2017-01-05 4684
-
想做一个火焰报警器,使用LCD16022016-12-15 5217
-
求一个门窗报警器电路2013-01-07 3614
-
如何建立一个CMOS 4060防盗报警器2010-10-21 1682
-
火灾报警 温度报警器 短信报警器2010-07-01 1746
-
车载GPS、GSM报警器电路原理图2009-10-27 3280
-
置于矿灯头内的瓦斯报警器电路2009-07-06 3220
全部0条评论

快来发表一下你的评论吧 !
