

关于Python对交通路口的红绿灯进行颜色检测
描述
转自 | Python联盟
1.视频读取
首先把视频读取进来,因为我测试的视频是4k的所以我用resize调整了一下视频的分辨大小
cap = cv2.VideoCapture('video/小路口.mp4')while True:ret,frame = cap.read()if ret == False:breakframe = cv2.resize(frame,(1920,1080))cv2.imshow('frame',frame)c = cv2.waitKey(10)if c==27:break
imshow()
2.截取roi区域
截取roi的区域,也就是说,为了避免多余的干扰因素我们要把红绿灯的位置给截取出来
截取后的roi
3.转换hsv颜色空间
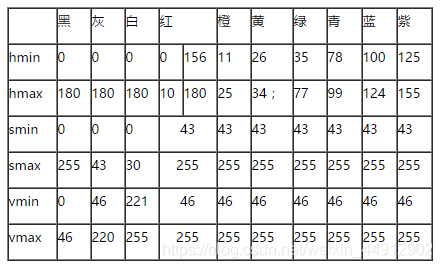
HSV颜色分量范围
(详细参考:https://www.cnblogs.com/wangyblzu/p/5710715.html)
一般对颜色空间的图像进行有效处理都是在HSV空间进行的,然后对于基本色中对应的HSV分量需要给定一个严格的范围,下面是通过实验计算的模糊范围(准确的范围在网上都没有给出)。H: 0— 180
S: 0— 255
V: 0— 255
此处把部分红色归为紫色范围(如下图所示):
上面是已给好特定的颜色值,如果你的颜色效果不佳,可以通过python代码来对min和max值的微调,用opencv中的api来获取你所需理想的颜色,可以复制以下代码来进行颜色的调整。
1.首先你要截取roi区域的一张图片
2.读取这张图然后调整颜色值
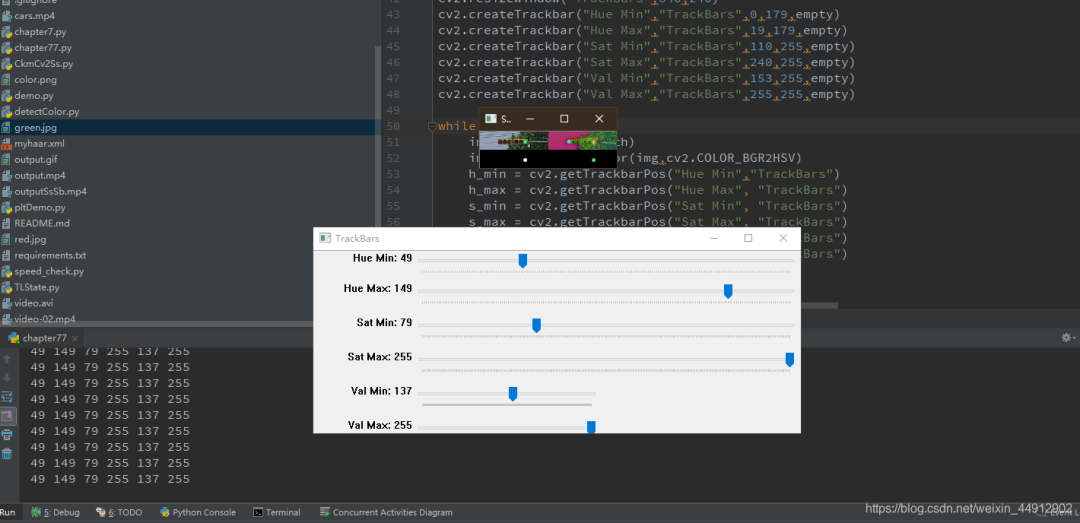
颜色调整代码如下:
(详细参考:https://www.bilibili.com/video/BV16K411W7x9)
import cv2import numpy as npdef empty(a):passdef stackImages(scale,imgArray):rows = len(imgArray)cols = len(imgArray[0])rowsAvailable = isinstance(imgArray[0], list)width = imgArray[0][0].shape[1]height = imgArray[0][0].shape[0]if rowsAvailable:for x in range ( 0, rows):for y in range(0, cols):if imgArray[x][y].shape[:2] == imgArray[0][0].shape [:2]:imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale)else:imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale)if len(imgArray[x][y].shape) == 2: imgArray[x][y]= cv2.cvtColor( imgArray[x][y], cv2.COLOR_GRAY2BGR)imageBlank = np.zeros((height, width, 3), np.uint8)hor = [imageBlank]*rowshor_con = [imageBlank]*rowsfor x in range(0, rows):hor[x] = np.hstack(imgArray[x])ver = np.vstack(hor)else:for x in range(0, rows):if imgArray[x].shape[:2] == imgArray[0].shape[:2]:imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale)else:imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None,scale, scale)if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR)hor= np.hstack(imgArray)ver = horreturn ver#读取的图片路径path = './green.jpg'cv2.namedWindow("TrackBars")cv2.resizeWindow("TrackBars",640,240)cv2.createTrackbar("Hue Min","TrackBars",0,179,empty)cv2.createTrackbar("Hue Max","TrackBars",19,179,empty)cv2.createTrackbar("Sat Min","TrackBars",110,255,empty)cv2.createTrackbar("Sat Max","TrackBars",240,255,empty)cv2.createTrackbar("Val Min","TrackBars",153,255,empty)cv2.createTrackbar("Val Max","TrackBars",255,255,empty)while True:img = cv2.imread(path)imgHSV = cv2.cvtColor(img,cv2.COLOR_BGR2HSV)h_min = cv2.getTrackbarPos("Hue Min","TrackBars")h_max = cv2.getTrackbarPos("Hue Max", "TrackBars")s_min = cv2.getTrackbarPos("Sat Min", "TrackBars")s_max = cv2.getTrackbarPos("Sat Max", "TrackBars")v_min = cv2.getTrackbarPos("Val Min", "TrackBars")v_max = cv2.getTrackbarPos("Val Max", "TrackBars")print(h_min,h_max,s_min,s_max,v_min,v_max)lower = np.array([h_min,s_min,v_min])upper = np.array([h_max,s_max,v_max])mask = cv2.inRange(imgHSV,lower,upper)imgResult = cv2.bitwise_and(img,img,mask=mask)imgStack = stackImages(0.6,([img,imgHSV],[mask,imgResult]))cv2.imshow("Stacked Images", imgStack)cv2.waitKey(1)
运行代码后调整的结果(如下图所示),很明显可以看到绿色已经被获取到。
4.二值图像颜色判定
因为图像是二值的图像,所以如果图像出现白点,也就是255,那么就取他的max最大值255,视频帧的不断变化然后遍历每个颜色值
red_color = np.max(red_blur)green_color = np.max(green_blur)if red_color == 255:print('red')elif green_color == 255:print('green')
5.颜色结果画在图像上
用矩形框来框选出红绿灯区域
cv2.rectangle(frame,(1020,50),(1060,90),(0,0,255),2) #按坐标画出矩形框cv2.putText(frame, "red", (1020, 40), cv2.FONT_HERSHEY_COMPLEX, 1, (0, 0, 255),2)#显示red文本信息
6.完整代码
import cv2import numpy as npcap = cv2.VideoCapture('video/小路口.mp4')while True:ret,frame = cap.read()if ret == False:breakframe = cv2.resize(frame,(1920,1080))#截取roi区域roiColor = frame[50:90,950:1100]#转换hsv颜色空间hsv = cv2.cvtColor(roiColor,cv2.COLOR_BGR2HSV)#redlower_hsv_red = np.array([157,177,122])upper_hsv_red = np.array([179,255,255])mask_red = cv2.inRange(hsv,lowerb=lower_hsv_red,upperb=upper_hsv_red)#中值滤波red_blur = cv2.medianBlur(mask_red, 7)#greenlower_hsv_green = np.array([49,79,137])upper_hsv_green = np.array([90,255,255])mask_green = cv2.inRange(hsv,lowerb=lower_hsv_green,upperb=upper_hsv_green)#中值滤波green_blur = cv2.medianBlur(mask_green, 7)#因为图像是二值的图像,所以如果图像出现白点,也就是255,那么就取他的max最大值255red_color = np.max(red_blur)green_color = np.max(green_blur)#在red_color中判断二值图像如果数值等于255,那么就判定为redif red_color == 255:print('red')#。。。这是我经常会混淆的坐标。。。就列举出来记一下。。。# y y+h x x+w#frame[50:90,950:1100]# x y x+w y+hcv2.rectangle(frame,(1020,50),(1060,90),(0,0,255),2) #按坐标画出矩形框cv2.putText(frame, "red", (1020, 40), cv2.FONT_HERSHEY_COMPLEX, 1, (0, 0, 255),2)#显示red文本信息#在green_color中判断二值图像如果数值等于255,那么就判定为greenelif green_color == 255:print('green')cv2.rectangle(frame,(1020,50),(1060,90),(0,255,0),2)cv2.putText(frame, "green", (1020, 40), cv2.FONT_HERSHEY_COMPLEX, 1, (0, 255, 0),2)cv2.imshow('frame',frame)red_blur = cv2.resize(red_blur,(300,200))green_blur = cv2.resize(green_blur,(300,200))cv2.imshow('red_window',red_blur)cv2.imshow('green_window',green_blur)c = cv2.waitKey(10)if c==27:break
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
使用PLC实现红绿灯控制示例2025-05-29 2425
-
揭秘 “红绿灯倒计时” 原理2024-02-21 7206
-
解决交通拥堵,智慧灯杆网关打造智能红绿灯2023-03-30 2375
-
大华股份创新升级“智慧红绿灯”应用2022-04-14 3056
-
如何利用单片机设计一个红绿灯2021-11-29 2832
-
如何去实现一种基于MCS-51单片机路口红绿灯控制设计2021-11-09 1274
-
基于MCS-51单片机路口红绿灯控制设计(含源码及Proteus布线图)2021-11-04 1678
-
人工智能可以控住红绿灯吗2019-06-05 3247
-
将VR技术应用于交通红绿灯中2018-12-22 4529
-
EDA实验路口红绿灯设计2017-05-26 1790
-
交通红绿灯2014-07-03 24768
-
交通红绿灯带仿真和程序2013-03-29 5397
-
交通路口红绿灯自动控制器电路图12009-05-26 2708
全部0条评论

快来发表一下你的评论吧 !
