

CAN驱动开发中使用CAN收发器遇到的问题
描述
摘要
本篇笔记主要记录基于恩智浦MPC5744P的CAN驱动开发和测试过程中使用英飞凌TLE9252带功能安全的CAN收发器时候遇到的问题。
准备工作
安装S32DS for PA, 因为我们在S32DS下开发MPC5744P。
安装S32DS 的SDK, 我们使用最新版3.0.3
问题提出
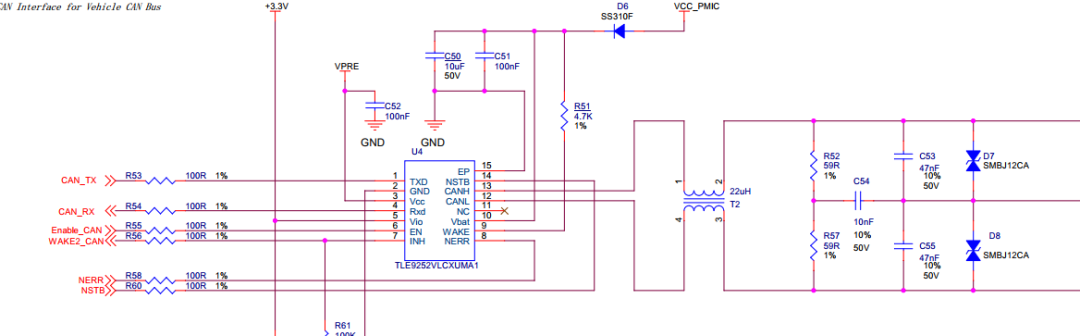
恩智浦的MPC5744P控制器局域网络CAN,跟我们之前使用的恩智浦Kinetis KV, 等系列的flexCAN结构基本是一样的,本次在开发过程中在使用英飞凌TLE9252收发器时候,之前开发的可以正常通信的工程无法通信。英飞凌的TLE9252是比较新的一颗料,主要用于汽车上带功能安全的CAN通信网络,比一般的收发器复杂,有多种操作模式,如,睡眠模式,正常模式,监听模式等,正常操作模式中需要将EN脚和NSTB脚拉高。
软件中添加

其余驱动程序和初始化跟CAN0一样,收发采用统一接口,可是在测试时候发现CAN1不通,无法通信。
解决问题
先将CAN跳线到另一路非功能安全的收发器,CAN通信收发正常,排除CAN驱动软件问题。
将CAN1跳回TLE9252V,最后经过多次实验验证发现电路中C53和C55目前的设计47nF偏大在500kbps波特率下,信号失真无法通信,将波特率调低为50kbps可以正常通信。拆掉C53和C54,可以正常通信,临时飞线硬件设计更改为容值小一档的电容,在1Mbps,500kbps下可以正常通信。
总结
在经典CAN设计中,速率低的时候可以不用这两个电容,在带有CANFD的通信中,CAN FD 速率比较高,一般需要添加这两个电容,但容值不易大,可以用示波器抓下波形,调整为合适值。
责任编辑:haq
-
CAN收发器电路原理#新能源未来加油dz 2023-05-09
-
CAN收发器有什么特点?2019-09-03 4182
-
UJA1169TK/F - CAN收发器是否支持CAN FD?2023-04-04 645
-
CTM系列隔离CAN收发器模块选型指南2010-03-26 1181
-
深入探析CAN收发器各项参数2018-12-15 16689
-
细数T-BOX中TI的明星产品之CAN 收发器 | 第二节 TCAN1042-Q1:“硬核”的CAN收发器2022-10-31 897
-
双 CAN 收发器的时序考虑2022-11-15 766
-
【技术分享】CAN隔离收发器测试,助您快速掌握产品基本性能2023-01-06 2765
-
NXP CAN收发器的特点及应用2023-09-05 6400
-
请问usb can收发器是否能和CAN FD总线搭配使用呢?2023-11-22 1805
-
CAN控制器、CAN收发器、CAN驱动器的区别是什么?2024-01-30 8452
-
汽车CAN收发器的作用、原理及构成2024-05-24 4429
-
CAN收发器与CAN控制器的区别2024-05-28 6331
-
CAN总线收发器的工作原理和应用2024-08-26 7072
-
CAN收发器:总线信号的“翻译官”2025-06-27 2833
全部0条评论

快来发表一下你的评论吧 !
