

串级PID控制原理
工控新闻
11人已加入
描述
串级PID控制原理
串级计算机控制系统的典型结构如下图所示,系统中有两个PID控制器,Gc2(s)称为副调节器传递函数,包围Gc2(s)的内环称为副回路。Gc1(s)称为主调节器传递函数,包围Gc1(s)的外环称为主回咱。主调节器的输出控制量u1作为副回路的给定量R2(s).

串级控制系统的计算机顺序是先主回路(PID1),后副回路(PID2)。控制方式有两种:一种是异步采样控制,即主回路的采样控制周期T1是副回路采样控制周期T2的整数倍。这是因为一般串级控制系统中主控对象的响应速度慢、副控对象的响应速度快的缘故。另一种是同频采样控制,即主、副回路的采样控制周期相同。这时,应根据副回路选择采样周期,因为副回路的受控对象的响应速度较快。
串级控制的主要优点:
1、将干扰加到副回路中,由副回路控制对其进行抑制;
2、副回路中参数的变化,由副回路给予控制,对被控制量Gc1的影响大为减弱;
3、副回路的惯性由副回路给予调节,因而提高了整个系统的响应速度。
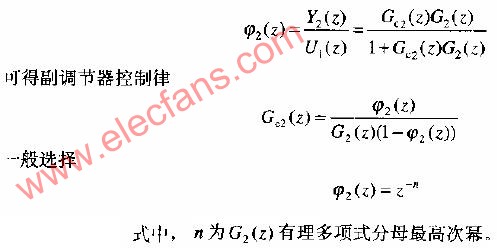
副回路是串级系统设计的关健。副回路设计的方式有很多种,下面介绍按预期闭环特性设计副调节器的设计方法。
由副回路框图可得副回路闭环系统的传递函数为:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
#工作原理大揭秘 #电子技术 #电机 速度位置双闭环的串级PID控制jf_76945564 2023-07-15
-
四旋翼源码第7版软启动+蓝牙源码(串级PID控制)2018-07-04 1504
-
基于labview的过程控制实验平台的设计能给点思路吗?2019-05-14 1108
-
基于大疆RM3508电机的串级PID相关资料推荐2021-06-30 1994
-
PID算法的代码实现2021-08-17 1856
-
PID的串级控制来控制电机2022-01-10 2707
-
基于串级PID控制技术的堆垛机控制器的设计2009-08-29 787
-
串级PID控制在无人机姿态控制的应用2010-01-18 971
-
常用的PID控制系统技术及仿真2010-04-28 688
-
基于磁传感器的PID控制自主飞行系统2017-11-02 944
-
压控大功率电流源的串级PID控制算法设计2018-02-10 5432
-
STM32实现四驱小车电机控制任务之电机速度PID控制算法2023-05-06 1187
-
四轴PID算法:单环和串级,你搞懂了吗?2023-12-11 3056
-
串级pid内环和外环怎么确定2024-08-23 5018
全部0条评论

快来发表一下你的评论吧 !
