

基于TI C6678+ Xilinx Zynq 7045的目标追踪视觉方案
描述
随着现代科技的高速发展,机器视觉技术在无人机、安防监控、工业检测、ADAS高级驾驶辅助系统、医疗诊断等方面有着广泛的应用,并且更多的场合中要求能实现高算力、高速采集、高速传输。目标追踪的视觉技术是计算机视觉领域的一个重要分支课题,有着重要的研究意义。
本文主要介绍基于TI C6678+ Xilinx Zynq-7045/7100的目标追踪视觉方案。
01
方案介绍
1.1方案要点
(1) 图像数据采集
通过可编程逻辑器件(例如FPGA)进行高速、高精度的图像数据采集,且可灵活接入各种摄像头,如CameraLink、SDI、PAL等。
(2) 目标追踪分析
将采集得到的图像数据通过高速数据总线(例如SRIO、PCIe等)传输至数字信号处理平台(例如DSP),通过算法对图像数据进行位置分析。
(3) 目标图像监控
将处理后的图像通过CameraLink、HDMI等接口进行实时显示,并可对可视化界面进行控制。
1.2 方案框图
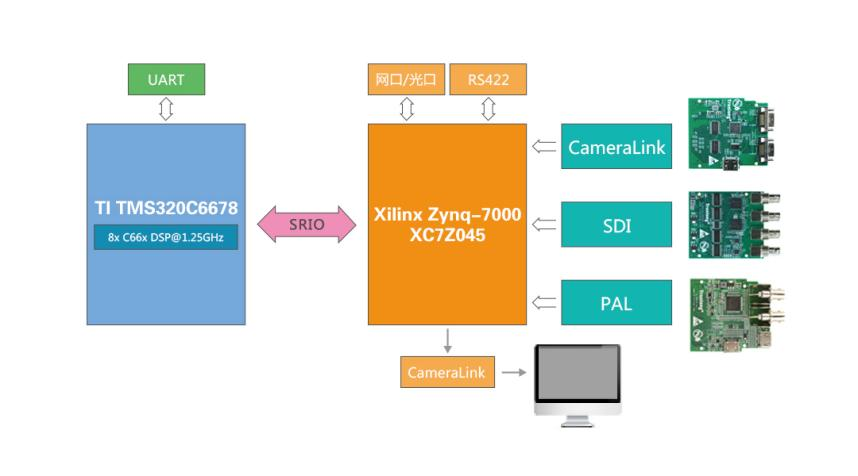
图 2 方案框图
1.3 方案优势
(1) 高性能处理器
TMS320C6678集成八核C66x定点/浮点DSP,主频可高达1.25GHz,运算能力可高达320 GMAC、160 GFLOP,算法能力强,满足目标追踪算法要求。
ZYNQ Z-7045/7100集成PS端双核ARM Cortex-A9 + PL端Kintex-7架构28nm可编程逻辑资源,ARM主频800MHz,硬件资源丰富。可通过PL端进行高速图像数据采集,并通过PS端进行业务逻辑控制,运用十分便捷。
(2) 视频接口丰富
可拓展众多目标追踪场合常用的视频接口,如CameraLink、SDI、HDMI、PAL等。其中CameraLink可支持Full模式,最大支持传输速率5.4Gbps。
(3) 系统稳定可靠
核心板集成DSP和ZYNQ处理器,芯片间通过SRIO高速接口链接,核间通信更高速、更稳定。
核心板经过高低温测试、振动测试、老化测试,并经过3000次系统掉电启动测试,达到工业级品质,系统运行稳定。
02
案例演示
本篇方案采用了创龙科技(Tronlong)基于TI TMS320C6678 + Xilinx Zynq-7045的高速多路高清视频采集处理平台,其采用DSP+FPGA+ARM架构,完美满足目标追踪关键指标。
接下来给大家介绍本次方案的案例功能,以及演示中所使用到的硬件平台/配套模块,感兴趣可以点击文末链接与扫描二维码自行下载相关资料、获取案例源码。
2.1演示硬件平台
*硬件平台:
创龙科技TL6678ZH-EVM评估板(TMS320C6678+Zynq-7045/7100)
2.2案例功能
(1)基于TL6678ZH-EVM评估板接入CameraLink相机采集图像,把图像数据传输到DSP进行Sobel(边缘检测)算法处理(客户可自行替换为目标追踪算法),最后通过网络输出处理结果。
(2)CameraLink相机参数:分辨率2560 x 2048,帧率107,灰度输出,每个像素8bit,数据量为2560 x 2048 x 107 x 8 ≈ 4.5Gbps。
(3)C6678与Zynq-7045通过SRIO接口的两个Lanes进行高速数据传输,每个Lane传输速率为5Gbps,总数据有效带宽为5Gbps x 2 x 80% = 8Gbps。
2.3演示案例模块推荐
创龙科技基于TL6678ZH-EVM评估板提供CameraLink、SDI、HDMI、PAL的测试案例,客户仅需要专注上层应用开发。
*方案模块:CameraLink模块、SDI模块、PAL模块
责任编辑:haq
-
[XILINX] 正点原子ZYNQ7035/7045/7100开发板发布、ZYNQ 7000系列、双核ARM、PCIe2.0、SFPX2!2024-09-02 10460
-
别错过!ZYNQ+C6678目标追踪、软件无线电方案分享!源码免费下载!2022-09-20 2015
-
源码公开!基于C6678+Zynq-7045的目标追踪视觉方案分享2021-11-09 2606
-
C6678+Zynq-7045的DSP多核IPC通信案例开发2021-09-14 2005
-
目标追踪视觉方案推荐,基于C6678+Zynq-70452021-09-07 2854
-
基于C6678+Zynq-7045目标追踪视觉方案推荐2021-05-25 4221
-
【方案分享】基于C6678+Zynq-7045 的目标追踪视觉技术2021-05-19 4223
-
AD9361+ZYNQ/K7软件无线电案例|适配Zynq-7045/7100、Kintex-7评估板2021-02-26 4536
-
【地表最强,宇宙首发】C6678+Zynq-7045评估板!2020-12-03 3312
-
免费供应TMS320C6678/TMS320C665x+Kintex-7/Artix-7、TMS320C6748+Spartan-6开发板试用2019-07-16 1644
-
Zynq-7045的功能介绍2018-11-21 23042
-
1G Hz的Zynq 7045 AP SoC能给我们带来什么?2018-06-04 6610
-
采用Xilinx_Zynq_SoC实现眼动追踪技术2016-10-26 1017
全部0条评论

快来发表一下你的评论吧 !
