

TI eSMO库Fsmopos和Gsmopos参数解析
描述
作者:Hardy Zhou
在电机无感控制算法方面,TI提供了eSMO滑模观测器来计算电机转子角度。 在应用方面,TI提供了eSMO lib文件和相关文档说明eSMO的使用,但是在使用过程中,可能没法从相关文档上理解Fsmopos和Gsmopos的含义,不方便调试。 因此本篇主要推导 TI eSMO电流计算公式,并导出Fsmopos和Gsmopos(分别简称F和G)公式,同时我们可以从推导出的公式看到TI 的计算和其他F和G的计算方式的差别,加深理解和熟练应用。
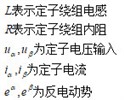
PMSM在静止α、β坐标系下的数学模型如下:
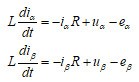 (1)
(1)
TI eSMO滑模观测器结构数学模型如下
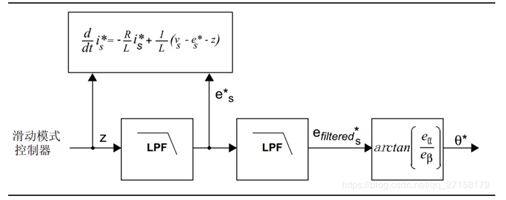
从结构上看,比较清晰明了,使用开关切换函数估算反电动势,从而求得电机转子角度。
从而我们可以得到以下的观测器表达式
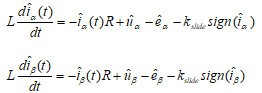
其中
基于以上公式,我们在α轴上求解eSMO电流,类似地可以求得β轴电流公式。

电流在时域下的解为:
对应离散时间Ts的电流解为
 (1)
(1)
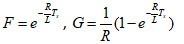
从而得到:
 (2)
(2)
(2) – (1)得到
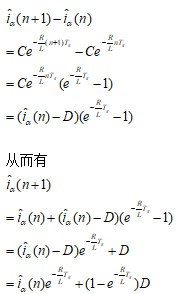
从而可以得到
注意: 如果离散时间Ts足够小,可以使用 近似。
近似。
那么就有
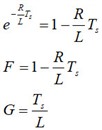
这样就跟其他非指数形式的表达式一样。
审核编辑:金巧
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
有没高手有TI DMC库的解析?2018-01-19 5231
-
请问TI哪个例程里有SMO后面的锁相环部分的例程?2018-09-11 3193
-
自定义硬件参数不起作用?2020-04-10 1690
-
关于smo参数的问题如何解答2020-07-18 4018
-
用cjson的库去解析数据2022-01-12 909
-
eSMO库Fsmopos和Gsmopos参数介绍2022-11-07 835
-
TI 的Protel原理图封装库和PCB封装库2016-06-22 1160
-
STM32的USB库深入解析2017-10-15 3324
-
TI StellarisWare图形库使用指南2017-10-29 1131
-
python解析库的使用--PyQuery2022-03-22 3075
-
TI eSMO 库Fsmopos和Gsmopos参数解析2022-10-28 729
-
TI eSMO库Fsmopos和Gsmopos参数解析2023-03-22 2806
-
Altium_Designer TI元件库2023-04-10 1488
-
使用TI的DLMS COSEM库2024-10-10 406
全部0条评论

快来发表一下你的评论吧 !
