

基础知识:通过DFF控制改善功率因数与THD
今日头条
描述
作者:Bosheng Sun
几十年来,平均电流模式控制一直用于功率因数校正 (PFC),而且在商业市场也有各种采用这种控制算法的 PFC 控制芯片。
图 1 是这种平均电流模式控制的形象介绍。
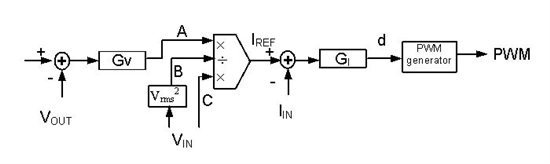
图 1. PFC 的平均电流模式控制
通常认为,平均电流模式控制的性能可充分满足大部分 50/60Hz AC 线路输入的商用电源应用需求。但是,传统平均电流模式控制会使电感器电流领先于输入电压,导致不统一的基本位移功率因数与过零失真。在 PFC 工作在高频率 AC 环境下时,这种情况会变得更糟糕,例如工作在 400Hz 下的机载系统。这些系统所需的高质量输入电流很难通过传统控制方法实现。一种名为占空比前馈 (DFF) 控制的最新控制方法可有效降低高线路频率下的输入电流失真1/2/3。
DFF 控制的基本构想是预先计算占空比,以减轻反馈控制器的任务。对于工作在连续传导模式下的升压拓扑来说,占空比 dFF 的计算公式为:
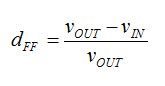
公式 1
该占空比模式在开关两端产成一个电压,其在整个开关周期内的平均值等于整流输入电压。常规电流环路补偿器会围绕这个计算出的占空比模式改变占空比。
由于升压电感器在线路频率下的阻抗非常低,因此很小的占空比变化就会在整个电感器上产生足够的电压,以生成所需的正弦电流波形。
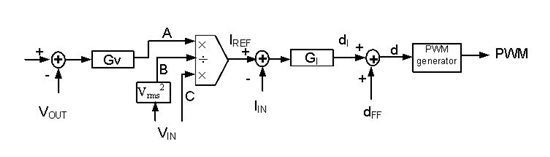
图 2. PFC 的占空比前馈控制
图 2 是获得的控制方案。公式 1 可计算前馈占空比 dFF。然后它可添加至传统平均电流模式控制输出 dI。最终的占空比 d 可用来生成控制 PFC 的脉宽调制 (PWM) 波形。
使用 DFF 控制时,需要很多数学计算。CPU 的速度可决定控制环路的速度,进而影响环路带宽。更快的 CPU 就意味着可实现更高的带宽。然而,这也意味着更高的成本与功耗。
当我使用德州仪器 (TI) 数字控制器 UCD3138 实施这一控制算法时,我利用 UCD3138 的硬件数字补偿器以相对较低的 CPU 速度实现了高带宽。
UCD3138 中的数字补偿器是一个增加了一个 α 的传统 PID 结构,可提供双极双零补偿(图 3)。P、I 和 D 是三个独立分支,合并输出后可生成最终的控制信号。数字补偿器运行速率高达 2MHz。由于 PFC 电流环路是一阶系统,因此通常情况下 PI 控制器已足够进行补偿。这可腾出 D 分支,用来提高 DFF 控制速度。
仔细观察图 2。尽管 IREF 和 dFF 由速度有限的 CPU 计算,但数字补偿器和 PWM 生成器是 UCD3138 的硬件,因此它们的运行速度更快。这就意味着 dI 能以高速进行计算。因而其实 dFF + dI = d,其可降低控制环路速度。如果 dFF + dI = d 也能通过硬件完成,那么不仅整个环路速度会比以前快,而且带宽也会提高。
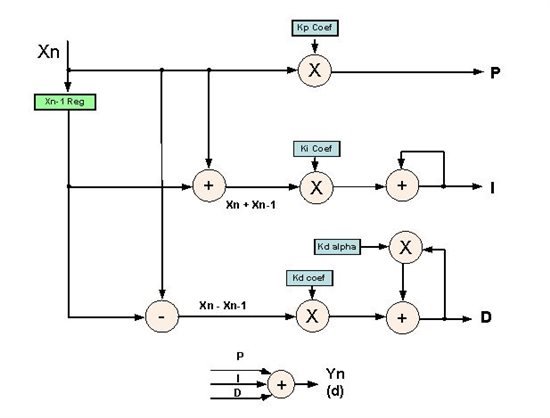
图 3. UCD3138 的 PID 结构
D 分支有两个高级特性:
- 输出可设置为预定义值
- 它可能会中止(冻结),使其输出维持当前值
我们可利用这两个特性增强 DFF 控制。
例如,电流控制环路必须是 100KHz,但由于 CPU 速度的限制,dFF 最多只能在 50KHz 速率下进行计算。完成计算后,将 D 分支输出预设为 dFF,然后中止。尽管 dFF 在 50kHz 下计算,但是 P、I 和 d = P + I + dFF 都在更快的 100KHz 速率下运行,因此 PWM 可在 100kHz 下更新。有效的控制环路将在 100kHz 下运行。该过程请参见图 4。
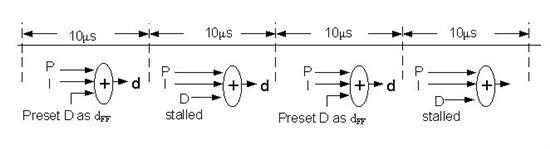
图 4. 将 DFF 与 UCD3138 PID 结构结合
有了更快的控制环路速度,就可提高带宽,从而改善 THD 和 PF。UCD3138 的独特结构可提供改进的 DFF 实施方案。
审核编辑:符乾江
-
功率因数的定义、特性及应用2025-04-09 9059
-
高功率因数线性恒流LED控制芯片2024-03-26 2114
-
什么是功率因数 功率因数校正基础知识2023-10-05 5795
-
如何测量总谐波失真以及所使用的功率因数计算2023-02-21 11190
-
如何通过DFF控制改善功率因数与THD2022-11-22 777
-
功率因数基础知识与功率因数变送器测试应用2021-09-28 4544
-
功率因数的校正2018-09-19 3339
-
通过DFF控制改善功率因数与THD的技巧2018-09-14 2404
-
使用谐波注入法降低PFC谐波并改善THD的方法2018-09-12 5926
-
功率因数改善电源的原理及相关IC2017-09-12 948
-
基础知识:通过 DFF 控制改善功率因数与 THD2017-04-18 4001
-
Intersil推出具THD和PF校正功能的有源功率因数控制器ISL6730A2013-04-12 1791
-
交流参数的测定及功率因数改善2009-10-24 2506
-
功率因数的改善2008-09-24 7011
全部0条评论

快来发表一下你的评论吧 !
