

高级安全驾驶员辅助系统为自动驾驶发展铺平道路
今日头条
描述
作者:Hannes Estl
要实现汽车自动驾驶,需要消除很多法律、社会和结构障碍。尽管几乎我们所有人都在科幻小说或电影中见识过“自动驾驶”汽车,但真要相信机器或车载电脑能在各种条件下带着我们四处游荡就是另外一回事了。此外,发生碰撞时的责任问题还将需要仔细核实,因为可能不再牵扯到人的问题(我们通常是犯错误或违法的群体)。理想情况下,路上的所有汽车都将具备自动驾驶功能。可惜这可能需要几代汽车发展才能成为现实。最后,也是相当重要的一点,要实现汽车与环境的通信(汽车与基础设施以及汽车与汽车的通信),需要进行大量的投资来安装和维护基础设施,并对通信方式进行标准化(每个人都讲相同的“语言”)。

但就目前而言,我们关注的是自动驾驶汽车的技术可行性。如今,我们对防抱死制动系统 (ABS) 及安全气囊等被动安全系统,或者电动助力转向系统与电子发动机管理都已习以为常了。这些系统能使汽车采取行动(制动、转向、加速),但行动的动力是什么呢?尽管高级驾驶员辅助系统 (ADAS) 尚未在所有汽车中普及,但这些系统将在从驾驶汽车到汽车自动驾驶的演进过程中发挥至关重要的作用,因为它们相当于汽车的眼睛。
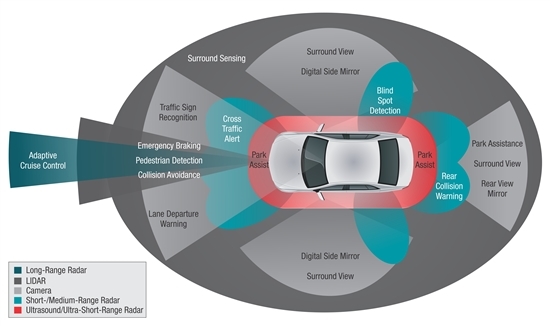
需要部署各种广泛的新型传感器作为 ADAS 的基础设施,尤其是摄像头系统、雷达和 LIDAR 等机器视觉传感器。这些传感器的使用将为汽车提供所需的态势感知功能,但对大量新数据的解读也将对系统处理能力提出挑战。例如,获取和处理摄像头影像的每个像素(低级处理),鉴定和识别图片中感兴趣的目标(中级处理),然后根据这些目标及其相对汽车的位置和移动情况做出决策(高级处理),这些都需要不同的处理功能。典型的微处理和数字处理技术擅长执行其中某项特定任务,但对于其它任务往往存在局限性。对于机器视觉而言,所有这些处理工作都必须按顺序实时执行,这就需要如TI TDA2x 片上系统 (SOC) 产品系列所具备的异构处理功能。
现在,由于汽车能看,能解读要做什么,并能依此采取行动,因此我们已经有了全部所需的基本模块。如欲查阅有关自动驾驶、机器视觉与异构处理的更多内容,敬请阅读白皮书:通过技术创新让汽车更安全。
-
自动驾驶真的会来吗?2016-07-21 14605
-
因为「不够安全」,我们就必须拒绝自动驾驶汽车上路?2017-04-08 3254
-
ADAS的发展给驾驶员驾驶视野的改变2018-08-29 3391
-
高级安全驾驶员辅助系统助力自动驾驶2018-09-14 3474
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 3320
-
高级辅助驾驶ADAS技术2019-04-03 2630
-
如何让自动驾驶更加安全?2019-05-13 3784
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2930
-
全高级驾驶员的感知系统2020-05-13 3014
-
高级驾驶员辅助系统(ADAS)解决方案2022-11-14 1505
-
高级安全驾驶员辅助系统介绍2022-11-22 1045
-
高级驾驶员辅助系统(ADAS)2011-09-13 2112
-
改善汽车安全技术能否为自动驾驶汽车铺平道路?2021-03-01 2407
-
5G技术为自动驾驶汽车铺平道路2022-06-16 1648
-
高级安全驾驶员辅助系统为自动驾驶铺平道路2022-11-04 706
全部0条评论

快来发表一下你的评论吧 !
