

迈向基于以太网的软件定义车辆的驱动力
描述
未来的自动驾驶汽车将成为世界上有史以来最复杂的“移动”设备之一。它的复杂性源于每天需要自主操作来处理 TB 级的数据——部分来自车辆内部、外部和周围的大量传感器和设备以及云——在运行一个亿行软件代码。这正在改变工程师对车辆的看法,尤其是车辆系统如何相互交流。
自动驾驶汽车——一种新的设计范式
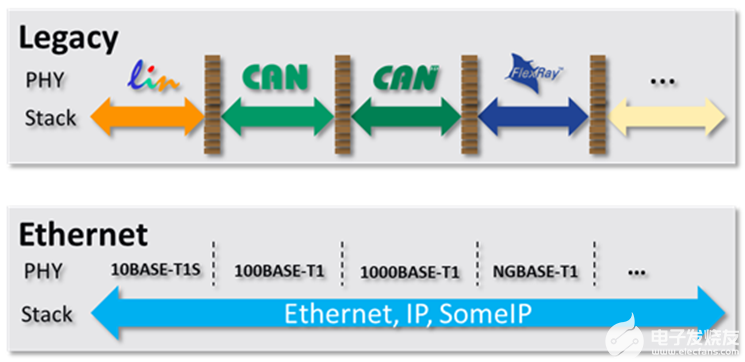
多年来汽车自动化的趋势导致了用于车辆子系统的复杂的独立计算机阵列。这些系统需要多个专用电子控制单元 (ECU)、不同类型的总线和协议,以及在总线之间转换数据和信号的网关,以便系统可以相互通信。这种异构方法成本高昂,难以抵御网络威胁,而且坦率地说,很重。电缆是汽车材料清单中成本第三高的部分,也是其构造中第三重的部件,在某些汽车中达到高达 110 磅的铜。
全自动驾驶汽车是一个更复杂的系统,需要大量实时数据、云连接以及快速、安全和可靠的决策。与今天的汽车相比,在汽车周围移动的数据量将大几个数量级,并且需要巨大的带宽。自动驾驶将需要更多的视频、雷达和 LiDAR 数据处理能力——而这些能力将需要数千兆比特的物理网络吞吐量来支持实时决策。数据记录、安全事务和与云的通信将增加 I/O 需求。
提供计算能力和管理复杂性需要重新思考汽车。车辆周围的多个分布式区域 ECU 将运行数百万行代码来处理来自本地端点和云端的数据,并与一个或多个主 ECU 互连,而不是专用 ECU。当尝试使用当今许多现有的网络协议和电缆连接所有这些设备时,会出现带宽、复杂性和成本等问题。
软件定义车辆
汽车正在演变为在分布式计算上运行的软件定义功能系统——软件定义车辆 (SDV)。计算中值得信赖的标准是建立在以太网上的基于 IP 的网络。以太网提供单一的通信总线并消除了车辆网关和电缆的复杂性,已被证明支持面向软件的架构的灵活性和性能,包括软件定义网络和虚拟化。
SDV 带来了许多好处。与面向硬件的系统相比,软件的更新、更改和改进更容易、更快。使用虚拟化,SDV 成为一个更加动态的计算环境。例如,当一个 ECU 开始出现故障时,软件定义的功能可以快速转移到整个车辆的其他 ECU,从而保持所需的功能安全级别和关键操作。
SDV 为制造商创造了新的机会,使他们的产品与众不同,增强安全性并改进他们的产品、服务和整体制造效率。SDV 要求制造商成为软件强国。制造商已经在“重新设计”他们的研发专业基础设施,以包括以前从未存在的软件开发团队。
SDV 中的安全性
数字安全对于自动驾驶汽车来说至关重要,这是一个从制造商延伸到车主的连续体。机上的许多设备以及与乘客和云的连接极大地扩大了不良行为者的攻击面。SDV 中采用的通用安全功能将基于支持安全启动、身份验证、加密(在需要时)、密钥和密钥管理以及安全飞地的开源解决方案。此外,特定于网络的安全服务可能包括以下功能:
-
虚拟 LAN 将区域 ECU 与物理网络隔离
-
访问控制以仅允许区域网络上的授权交易
-
深度数据包检查以监控交易并检测和阻止不需要的数据
-
入侵检测和预防,以阻止不良行为者获得访问权限
在现场,更新将需要防止黑客入侵,最有可能通过在生产车间建立并以车辆所有者结束的安全信任链。
帮助确保功能安全的工具
为了在 SDV 中实现通信,市场需要用于以太网和其他协议的汽车专用物理设备 (PHY)。这些设备需要提供所需的带宽和成本,并满足行业制定和监管机构设定的功能安全要求。Microchip 是汽车解决方案的主要贡献者。该公司的目录提供了许多用于汽车的“功能安全就绪”设备,包括符合汽车标准的以太网设备。
这些设备经过精心挑选,可帮助制造商获得 ISO 26262 认证,其中包含许多工具,包括故障模式影响和诊断分析 (FMEDA) 报告、功能安全手册、诊断软件和开发工具。
自动驾驶的全以太网视觉
汽车行业的愿景是向全以太网 SDV 迈进,具有联网的区域 ECU、传感器和由中央 ECU 控制的设备。与成熟的公司相比,这种迁移对于新制造商来说更容易。新建环境可以立即全部投入使用,以便轻松采用全以太网方法。对于其他汽车制造商而言,迁移到全以太网车辆可能需要时间,这需要 SDV 包括 CAN、LIN 和其他总线的混合网络架构,以便通过主要以太网骨干网与某些组件进行本地连接。
以太网值得信赖、经过验证的标准、从 Mbps 到 Gbps 的高带宽和简单性支持 SDV 所需的必要性能、安全服务和轻松连接。以太网的串行布线选项降低了多个汽车网络、布线和重量的成本和复杂性。减轻重量可以提高燃油效率——电动和汽油/柴油。而且,虽然以太网是一种成熟的标准化技术,但它会继续发展以支持汽车等具有特定需求的市场,包括确定性和高带宽——自动驾驶汽车的必需品。
- 相关推荐
- 热点推荐
- SDV
-
以太网是什么鬼?以太网基础知识详解电子学习 2023-02-07
-
车载以太网快速入门#车载以太网北汇信息POLELINK 2023-09-01
-
车载以太网基础培训——车载以太网的链路层#车载以太网北汇信息POLELINK 2023-09-19
-
以太网和工业以太网的不同2018-10-23 2841
-
以太网调试软件wizport2010-11-26 1367
-
深入工业以太网—实时以太网2020-12-15 1847
-
基于汽车以太网的车辆基础设施及电气架构2021-07-09 1129
-
如何快速分辨以太网与千兆以太网2022-05-06 6668
-
牵引逆变器—车辆电气化背后的驱动力2022-09-23 1071
-
基于以太网的标准化车辆诊断2022-11-25 2278
-
以太网接口的类型及参数2023-02-14 4787
-
工业以太网的定义2023-04-24 1207
-
车载以太网静态架构介绍2024-01-19 2319
-
科普科普以太网的定义、种类以及晶振在以太网上的应用2024-01-24 2875
-
以太网协议的种类和特点2024-11-08 5670
全部0条评论

快来发表一下你的评论吧 !
