

四旋翼无人机是如何实现飞行的,它的原理是什么
描述
四旋翼无人机曾被《时代》杂志评为2014年度十大科技产品之一,具有造型小巧,可自由悬停、垂直起降,机身易操控以及适用于多种环境等优点,被广泛运用于日常生活中。
在人工智能教育高速发展的环境下,可编程的四旋翼无人机更是受到许多中小学生的追捧。下面,我们一起来了解一下四旋翼无人机是如何实现飞行的吧!
四旋翼无人机飞行原理及控制方法
一般情况下,四旋翼无人机由检测模块、控制模块、驱动模块以及电源模块四个部分组成。
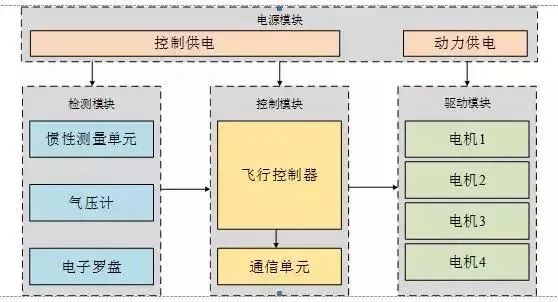
检测模块:负责对无人机当前姿态进行量测,并对控制模块提供数据;
控制模块:负责对无人机当前姿态进行解算,优化控制,并对驱动模块产生相对应的控制量;
驱动模块:负责驱动无人机进行飞行;
电源模块:负责对整个系统进行供电。
四旋翼无人机机身主要是由对称的十字形刚体结构构成,材料多采用碳纤维、玻璃纤维以及树脂等复合材料。而Drone:bit编程无人机机身则是采用了金属材料,具有结实耐用的特点。
 Drone:bit
Drone:bit如下图所示,现将位于四旋翼机身同一对角线上的两个旋翼归为一组。
前后端(4、2号)的旋翼沿顺时针方向旋转,从而可以产生顺时针方向的扭矩;而左右端(1、3号)的旋翼则沿逆时针方向旋转,从而产生逆时针方向的扭矩。
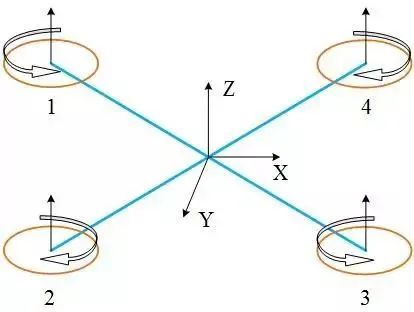
如此,四个旋翼旋转所产生的扭矩便可相互抵消。
由此可知,四旋翼无人机的所有姿态和位置的控制都是通过调节四个驱动电机的速度实现的。
一般来说,四旋翼无人机的运动状态主要分为悬停、垂直运动、翻滚运动、俯仰运动以及偏航运动五种状态。
悬停
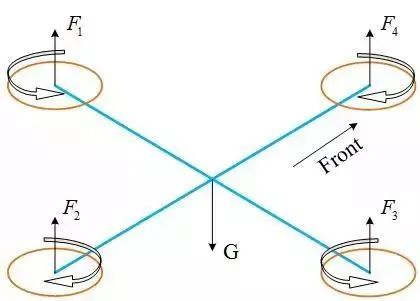
在悬停状态下,由于无人机的四个旋翼具有相同的转速,产生的上升合力正好与自身重力相等;并且因为旋翼转速大小相同、前后端和左右端转速方向相反,从而使得无人机总扭矩为零,得以静止在空中,实现悬停状态。
- 旋翼总升力=无人机重力,悬停
垂直运动
在保证四旋翼无人机每个旋翼转速大小相同、前后端和左右端转速方向相反的情况下,同时对每个旋翼增加/减小大小相同的转速,便可实现无人机的垂直运动。
- 旋翼总升力>无人机重力,垂直上升;
- 旋翼总升力<无人机重力,垂直下降。
翻滚运动
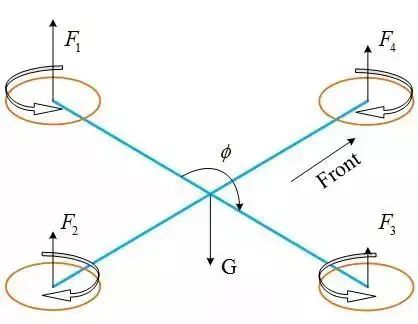
翻滚运动是在保持四旋翼无人机前后端旋翼转速不变的情况下,通过改变左右端的旋翼转速,使得左右旋翼之间形成一定的升力差,从而使得沿无人机机体左右对称轴上产生一定力矩,导致在方向上产生角加速度实现控制。
如图所示,增加旋翼1的转速,减小旋翼3的转速,则无人机倾斜于右侧飞行;反之,则向左倾斜。
俯仰运动
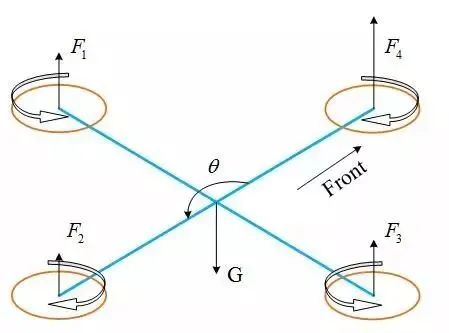
与翻滚运动相似,在保持四旋翼无人机左右端旋翼转速不变的情况下,通过改变前后端的旋翼转速,形成前后旋翼升力差,从而在机体前后对称轴上形成一定力矩,引起角方向上的角加速度实现控制。
如图所示,增加旋翼2的转速,减小旋翼4的转速,则无人机向前倾斜飞行;反之,则向后倾斜。
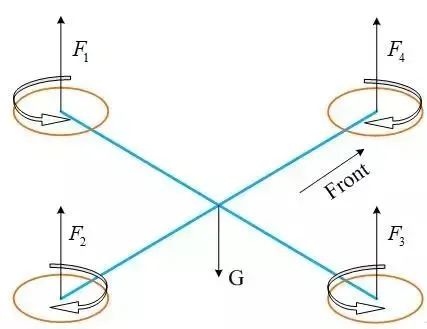
偏航运动
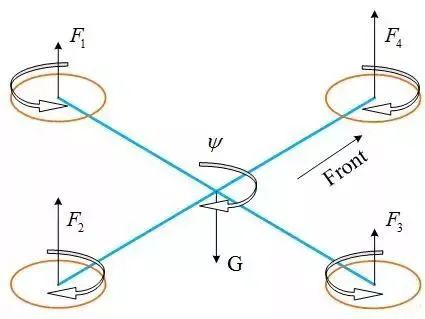
四旋翼无人机的偏航运动是通过同时两两控制四个旋翼转速实现控制的。
保持前后端或左右端旋翼转速相同时,其便不会发生俯仰或翻滚运动;而当每组内的两个旋翼与另一组旋翼转速不同时,由于两组旋翼旋转方向不同,就会导致反扭矩力的不平衡,此时便会产生绕机身中心轴的反作用力,引起沿角角加速度。
如图所示,当前后端旋翼的转速相同并大于左右端旋翼转速时,因为前者沿顺时针方向旋转,后者相反,总的反扭矩沿逆时针方向,反作用力作用在机身中心轴上沿逆时针方向,引起逆时针偏航运动;反之,则会引起顺时针偏航运动。
综上所述,四旋翼无人机各个飞行状态的控制是通过控制对称的四个旋翼的转速,形成相应不同的运动组合实现的。
更多无人机STEAM教育资讯,可关注公众号“创客火无人机”。
编辑:fqj
-
【OK210申请】四旋翼无人机导航与控制2015-07-24 1655
-
【AWorks280试用申请】通用多旋翼无人机安全保护系统2015-10-23 1897
-
四旋翼无人机的代码2016-06-26 7733
-
为什么无人机都是四个旋转翼2016-07-12 3886
-
电子大赛四旋翼无人机尺寸2019-07-08 3255
-
四旋翼无人机的使用指南2019-09-16 2122
-
怎样去设计四旋翼无人机飞控系统2021-07-19 1832
-
四旋翼无人机运动原理2021-08-09 2072
-
手把手教你如何去制作无刷四旋翼无人机2021-08-19 2758
-
小白带你入坑四旋翼无人机——物料篇 精选资料推荐2021-09-02 1206
-
关于固定翼航模及四旋翼无人机基础总结的太棒了2021-09-23 8458
-
小型四旋翼无人机组机方案2017-06-20 2990
-
采用PID控制器实现四旋翼无人机的四元数控制律设计2020-04-19 9696
-
笔记:四旋翼无人机从0到1的实现,目录链接2021-12-09 1398
-
四旋翼无人机飞行原理【其利天下无人机方案开发】2024-01-26 4192
全部0条评论

快来发表一下你的评论吧 !
