

如何实现向高级电机控制的转变
控制/MCU
描述
Microchip高级营销工程师-II
Nelson Alexander
基于采用无传感器磁场定向控制(FOC)的永磁同步电机(PMSM)的高级电机控制系统快速普及,这种现象的背后有两个主要驱动因素:提高能效和加强产品的差异化。虽然有证据表明采用无传感器FOC的PMSM可以实现这两个目标,但需要一个可提供整体实现方法的设计生态系统才能取得成功。利用整体的生态系统,设计人员能够克服实现过程中阻碍系统采用的各种挑战。
为什么选择PMSM?
PMSM电机是一种使用电子换向的无刷电机。它经常与无刷直流电机(BLDC)混淆,后者是无刷电机系列的另一个成员,也使用电子换向,但在结构上略有不同。PMSM的结构可针对FOC进行优化,而BLDC电机经过优化后可使用6步换向技术。经过优化后,PMSM可获得正弦波反电动势(Back-EMF),而BLDC电机则获得梯形波反电动势。
这些电机各自使用的转子位置传感器也不同。PMSM通常使用一个位置编码器进行操作,而BLDC电机则使用三个霍尔传感器进行操作。如果考虑到成本,设计人员可以考虑实施无传感器技术,以省去磁体、传感器、连接器和接线的成本。去除传感器还有助于提高可靠性,因为这会减少系统中可能发生故障的元件数量。当比较无传感器PMSM和无传感器BLDC时,使用FOC算法的无传感器PMSM可提供更出色的性能,而使用类似硬件设计的实现成本相当。
转用PMSM的最大受益者是那些目前正在使用有刷直流(BDC)或交流感应电机(ACIM)的应用。切换的主要好处包括具有更低的功耗、更高的速度、更平稳的转矩、更低的可闻噪音、更长的使用寿命和更小巧的尺寸,从而使应用更具竞争力。但是,要想实现使用PMSM的这些好处,开发人员需要实现更复杂的FOC控制技术以及其他应用特定算法,才能满足系统需求。虽然PMSM比BDC或ACIM的成本更加昂贵,但它具有更多优势。
实现中的挑战

图1:使用三相电压源逆变器的三相无传感器PMSM控制系统
但是,要实现使用PMSM的优势,需要了解实现高级FOC电机控制技术时固有的硬件复杂性,同时还需要掌握这一领域的专业知识。图1给出了使用三相电压源逆变器的三相无传感器PMSM控制系统。控制逆变器需要三对相互关联的高分辨率PWM信号,以及大量需要信号调理的模拟反馈信号。此系统还需要硬件保护功能来实现容错,同时利用高速模拟比较器实现了快速响应。实现传感、控制和保护所需的这些额外模拟元件增加了解决方案的成本,而典型的BDC电机设计或简单的ACIM每赫兹电压(V/F)控制并不需要这些元件。
此外,还有为PMSM电机控制应用定义元件规格和进行验证所需的开发时间。 要应对这些挑战,设计人员可以选择一款合适的单片机,以实现与专为PMSM电机控制量身定制的器件规格的高度模拟集成。这将会减少所需的外部元件数量并优化物料清单(BOM)。高度集成的电机控制器件现已具有高分辨率PWM,可简化高级控制算法、用于精密测量和信号调理的高速模拟外设、功能安全所需的硬件外设,以及用于通信和调试的串行接口的实现。
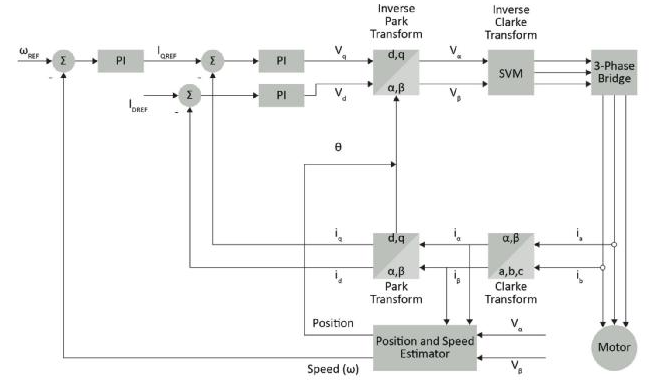
图2:标准无传感器FOC的框图
此外,还有一个较大的挑战,即电机控制软件与电机的电机械行为之间的交互。图2给出了标准的无传感器FOC框图。要将其从概念转变为实际的设计,需要了解控制器架构和数字信号处理器(DSP)指令,以实现数学计算密集的时间关键控制环。
为实现可靠的性能,控制环必须在一个PWM周期内执行。必须对控制环的时间进行优化,具体包括以下三个原因:
1) 限制:使用不低于20 kHz的PWM开关频率(时长为50 μs),以抑制来自逆变器开关的噪声。
2) 为实现带宽更高的控制系统,控制环必须在一个PWM周期内执行。
3) 为支持其他后台任务(如系统监视、应用特定功能和通信),控制环需要以更快的速度运行。因此,FOC算法的目标应该是在10 μs以内执行。
许多制造商提供了利用无传感器估算器来估算转子位置的FOC软件示例。但是,在使电机开始转动之前,FOC算法必须配置各种参数以匹配电机和硬件。必须对控制参数和系数进行进一步优化,以满足所需的速度和效率目标。可以通过结合以下方法实现这一目标:1) 使用电机数据手册获得参数;2) 反复进行试验。电机数据手册并不能始终对电机参数进行准确的表征,或者设计人员无法获得高精度测量设备,在这种情况下,开发人员将不得不借助反复试验的方法。这种手动调整的过程需要时间和经验。
PMSM电机用于许多不同的应用,运行在不同的环境中,或者存在不同的设计限制。例如,在汽车散热器风扇中,当电机即将启动时,由于风的作用,风扇叶片有可能向相反的方向自由旋转。在这种情况下,启动采用无传感器算法的PMSM电机是一个挑战,而且有可能损坏逆变器。一种解决方案是检测旋转方向和转子位置,并利用这些信息在启动电机前通过主动制动将电机减速至静止状态。同样,还可能有必要实施附加算法,如每安培最大转矩(MTPA)、转矩补偿和磁场弱化[1]等。这些类型的应用特定附加算法对于开发实用解决方案必不可少,但它们也会延长开发时间并使软件验证复杂化,进而增加设计复杂程度。
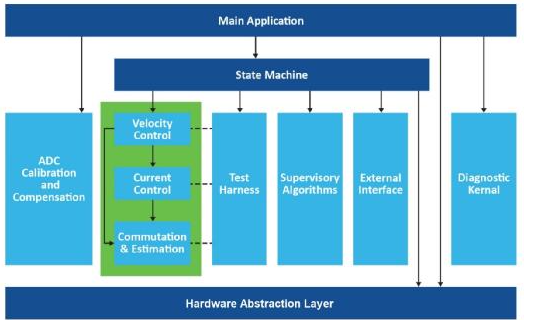
图3:FOC的应用框架
降低复杂程度的一种解决方案是,设计人员创建一个模块化软件架构,这种架构可将应用特定算法添加到FOC算法中,同时不影响时间关键型执行。图3给出了典型的实时电机控制应用程序的软件架构。此框架的核心是FOC函数,该函数提供了硬时序约束和许多应用特定的附加功能。框架内的状态机将这些控制功能与主应用程序连接起来。这种架构需要在软件函数块之间有一个定义明确的接口,以使其实现模块化并简化代码维护工作。模块化框架支持不同应用特定算法与其他系统监视、保护和功能安全程序的集成。
模块化架构的另一个好处是将外设接口层(或硬件抽象层)从电机控制软件中分离出来,这便于设计人员在应用功能和性能需求发生变化时,将其IP从一个电机控制器无缝迁移到另一个电机控制器。
完整生态系统的需求
应对这些挑战需要一个为无传感器FOC量身打造的电机控制生态系统。电机控制器、硬件、软件和开发环境应协同工作,以简化实现高级电机控制算法的过程。 为实现这一目标,此生态系统应具有以下特性:
1.一种用于自动执行电机参数测量、设计控制环和生成源代码的高级工具,可让没有领域专业知识的设计人员能够实现FOC电机控制,并编写和调试非常耗时的复杂时间关键型代码
2.适用于FOC和不同应用特定附加算法的应用框架,用于缩短开发和测试时间
3.具有确定性响应的电机控制器以及可在单芯片中实现信号调理和系统保护的集成模拟外设,用于降低解决方案总成本
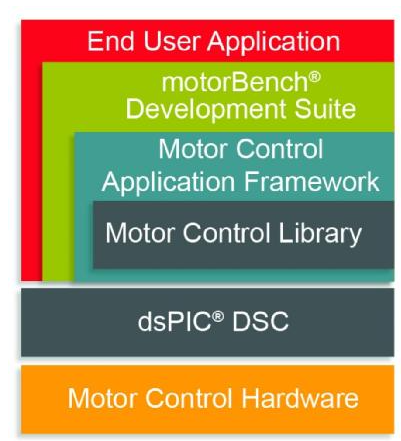
图4:Microchip电机控制生态系统架构
图4给出了一个电机控制生态系统架构的示例,其中包括应用框架和一个用于高性能dsPIC33电机控制数字信号控制器(DSC)的开发套件。此开发套件在基于GUI的FOC软件开发工具的基础上构建,可以测量关键的电机参数并自动调整反馈控制增益。此外,它还可为利用电机控制应用框架(MCAF)在开发环境中创建的项目生成所需的源代码。解决方案协议栈的核心是电机控制库,这种库可以实现应用程序的时间关键型控制环功能,并与dsPIC33 DSC的电机控制外设交互。此GUI可与多个可用的电机控制开发板配合使用,支持电机参数提取并为各种低压和高压电机生成FOC代码。
对高能效和产品差异化的需求推动了向无刷电机的转变。全面的电机控制生态系统可提供一种整体方法来简化基于PMSM的无传感器FOC的实现,这种方法应包含专用的电机控制器、快速原型开发板和可自动生成代码的易用FOC开发软件。
参考资料
[1] TB3220-利用角度跟踪锁相环估算器实现面向家用电器的永磁同步电机(表面贴装和内置)的无传感器磁场定向控制:http://www.microchip.com.cn/newcommunity//Uploads/202003/5e65d169337d8.pdf
[2] motorBench®开发套件:https://www.microchip.com/design-centers/motor-control-and-drive/motorbench-development-auto-tuning
[3] 电机控制设计资源:https://www.microchip.com/design-centers/motor-control-and-drive
[4] 电机控制库:https://www.microchip.com/design-centers/motor-control-and-drive/motor-control-library
-
瑞萨旋转变压器电机控制解决方案2025-02-14 3261
-
瑞萨高精度旋转变压器电机控制方案2024-03-15 2908
-
工业自动化逐步向工业无线的转变发展2014-04-25 4092
-
电机控制有什么高级的算法?2016-01-25 4395
-
基于创新MCU的高效节能电机控制2019-07-04 2650
-
电视监控的方式向数字方式转变2019-07-09 2361
-
PBGA向FBGA转变过程中的挑战是什么2021-04-30 1642
-
如何实现步进电机中的速度调节控制设计2018-10-26 19992
-
如何实现中国制造向中国创造转变2019-07-22 7270
-
中国制造如何才能实现制造大国向制造强国转变2020-01-14 7786
-
了解电机控制器的工作原理2021-03-11 12886
-
使用旋转变压器的电机控制方案2022-12-09 975
-
电机上的旋转变压器有什么用处?它是如何调整的?2023-03-10 13613
-
什么是驱动电机旋转变压器?驱动电机旋转变压器的优势2023-10-17 2838
-
基于模型的高级电机控制系统设计2023-11-29 518
全部0条评论

快来发表一下你的评论吧 !
