

功率放大器在压电振动驱动旋转机器人制作中的应用
今日头条
描述
实验名称:基于振动驱动的旋转及攀爬软体机器人的研究
研究方向:利用振动驱动原理,设计了能够实现快速旋转运动和攀爬运动的两种软体驱动结构。
实验内容:
旋转软体机器人具有可实现大变形、柔性接触、人体友好等特性,在移动机器人、生物医学器件等领域具有重要的应用价值。本文主要设计并制作了压电振动驱动的旋转软体机器人,并通过有限元仿真对其运动进行分析,然后研究了施加的激励力的幅值和角频率对该机器人旋转速度影响,最后通过实验验证有限元仿真结果。
旋转软体机械人的制作实验设备:
硅胶、PLA、振动电机、锂电池、亚克力玻璃管、可调直流稳压电源、高速摄像机、3D打印机、精密电子天平、恒温鼓风干燥箱、电子秒表、信号发生器、功率放大器、数码摄像机。
实验过程:
旋转软体机器人的实验研究:
在旋转软件机器人的转速测量实验中,功率放大器将信号发生器发出的激励信号进行放大,然后激励信号施加在机器人上。为了测量机器人的旋转角度,在机器人上标明箭头,并将其置于坐标纸上,该坐标纸的每小格夹角为30°。使用数码相机同步拍摄机器人的运动过程,然后根据机器人转过一周所需时间计算机器人的旋转速度。
实验结果:
下图为电压和频率对旋转软体机器人转速的影响,其中横坐标为频率,纵坐标为机器人的转速,当施加频率超过700Hz后,该旋转软体机器人旋转速度存在明显的规律,其呈现旋转速度先增大后减小得趋势,造成这种现象原因可能是当外加电压接近机器人的共振频率时,旋转软体机器人的转速越大。当在电压400Vpp时,频率1400Hz,该机器人最大转速可达118.3r/min,与模拟得到的机器人转速113.5r/min相近,验证了理论与数据分析结果。
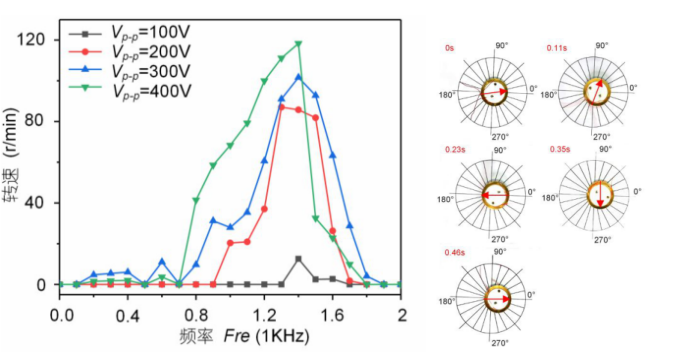
功率放大器在实验过程中提供了高电压,施加在机器人上,通过数值模拟和实验的结果对旋转软体机器人进行了运动机理分析,并通过实验对其旋转性能进行了研究对其旋转性能进行了研究。该机器人通过压电双晶片产生振动驱动旋转软体结构的触角周期性下弯和上弹运动,在触角向下弯运动过程产生的静摩檫力大于触角向上弹起运动过程中产生滑动摩檫力,从而产生净动力,进而在高频激励力作用下可以实现快速旋转。
功率放大器选择的是ATA-2042,最大可输出400Vpp的电压,频率范围DC-500KHz,输出功率最大20W,可以驱动高压型负载。电压增益数控可调,一键保存常用设置,提供了方便简洁的操作选择,可与主流的信号发生器配套使用,实现信号的完美放大。
本文实验素材由西安安泰电子整理发布,如想了解更多实验方案,请持续关注安泰官网。Aigtek是国内专业从事测量仪器研发、生产和销售的高科技企业,一直专注于功率放大器、线束测试仪、计量校准源等测试仪器产品的研发与制造。
审核编辑:符乾江
-
安泰功率放大器应用:振动测振仪压电陶瓷振动幅度频率监测2024-12-04 1639
-
功率放大器在合成射流激励器中的应用2024-03-08 4954
-
功率放大器模块在水下机器人中的应用有哪些2023-12-18 1156
-
高压功率放大器在压电换能器中的作用2023-10-25 1507
-
功率放大器在压电驱动器中的作用及应用2023-05-23 1767
-
功率放大器在驱动介电弹性体机器人的应用2023-02-24 1249
-
功率放大器在压电振动驱动旋转机器人制作中的应用2021-08-12 1311
-
功率放大器基于振动驱动的旋转及攀爬软体机器人的研究2021-04-09 3320
-
功率放大器在压电样品超声谐振谱测试中应用2020-02-18 3350
-
基于压电陶瓷的声光模式转换实验中功率放大器的应用2020-02-17 1894
-
压电陶瓷功率放大器在物镜驱动测试中的研究2019-11-19 3168
-
功率放大器,超声功率放大器定义分类和应用2017-12-15 5895
-
波形功率放大器的原理与应用2017-06-21 4909
全部0条评论

快来发表一下你的评论吧 !
