

什么是LiDAR?LiDAR的工作原理
MEMS/传感技术
描述
什么是光探测和测距 (LiDAR)?LiDAR 将雷达测距能力与相机的角分辨率相结合,提供准确的深度感知传感以完成图像(图 1)。
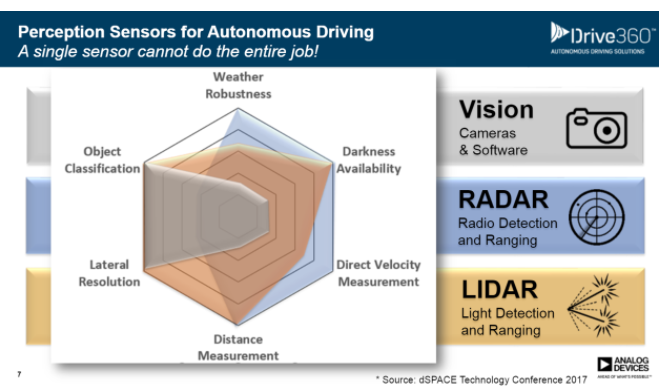
图 1摄像头、雷达和激光雷达是车辆自动驾驶的三种首选技术。资料来源:Analog Devices Inc.
视觉部分代表相机或驾驶员的可见能力、物体分类和横向分辨率。黑暗和天气事件——例如雪、灰尘或雨——会削弱这些能力。雷达部分代表发射的射频信号的返回。该信号可穿透天气和黑暗,同时提供距离测量。LiDAR 部分通过提供进一步的对象分类、横向分辨率、距离测量和黑暗穿透来完成传感图片。
它是如何工作的
LiDAR 系统的基础包括方波发光系统、感兴趣的环境以及解释环境中外部元素距离的光接收器系统。LiDAR 传感方法使用脉冲激光形式的光来测量距离,并分析返回信号的飞行时间 (ToF)(图 2)。
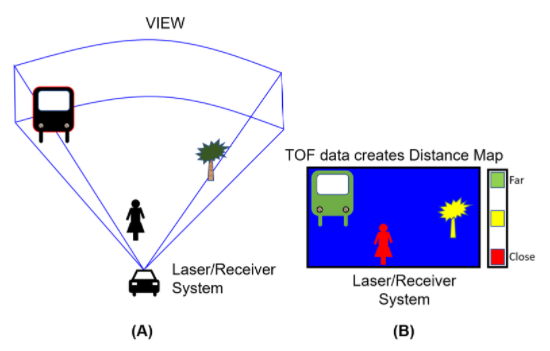
图 2每个 LiDAR 发射单元都有一个三角形“视图”。资料来源:邦妮贝克
距离的绘制取决于光学数字信号。
数字域中的信号
LiDAR 电路解决方案通过汽车跨阻放大器解决了信号接收挑战。输入级接受光电探测器的负输入电流脉冲(图 3)。
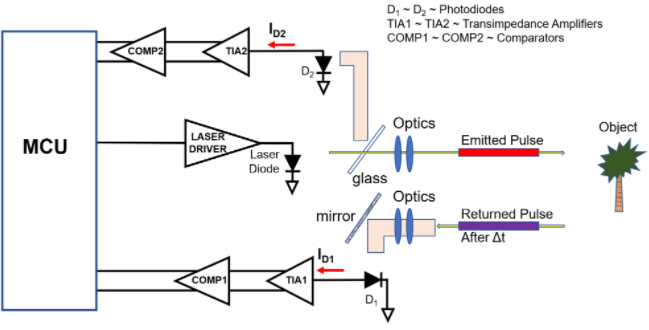
图 3电子设备包括一个激光二极管发射器和两个光电二极管接收器。资料来源:邦妮贝克
激光二极管通过一块玻璃传输数字脉冲串。该信号也反射到 D 2光电二极管。该信号的处理提供了传输时间以及系统中内置的电子延迟。
数字光信号向物体发出脉冲并反射回光学系统。返回的脉冲镜像到第二个光电二极管 D 1。D 1信号路径与 D 2信号路径具有相同的电子设备。两个信号都到达微控制器单元 (MCU) 以计算 ToF。
市场快照
汽车激光雷达系统使用脉冲激光来测量两辆车之间的距离。汽车系统利用激光雷达来控制车速和制动系统,以响应交通状况的突然变化。半自动或全自动车辆辅助功能在碰撞警告和避让系统、车道保持辅助、车道偏离警告、盲点监视器和自适应巡航控制中采用激光雷达。汽车激光雷达正在取代自动化系统中早期的汽车雷达系统。LiDAR 系统的距离范围从几米到 1,000 多米。
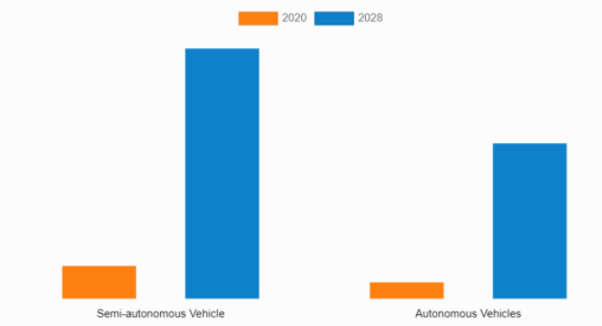
图 4汽车激光雷达市场分为半自动和自动驾驶汽车应用。资料来源:联合市场研究
自动驾驶汽车将继续存在,激光雷达成像系统进一步完善了这幅画。目前半自动驾驶和全自动驾驶的首选技术是雷达、摄像头和激光雷达设备。激光雷达价格正在下降,市场正在加速走向这种变化。
-
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box2017-12-15 6159
-
LIDAR与RADAR在自动驾驶汽车中的比较2018-10-30 6669
-
如何选择汽车LiDAR的激光器和光电探测器2018-11-08 2759
-
实现“三重视野” – LiDAR技术实现安全驾驶2020-08-20 2595
-
如何利用高速ADC设计用于汽车的LIDAR系统?2021-05-17 2692
-
请问LIDAR感知挑战有哪些?2021-06-17 2114
-
固态LiDAR发展前景浅析2018-06-01 3298
-
固态LiDAR与机械LiDAR该如何选择2018-05-16 7616
-
激光雷达LIDAR的工作原理及特点应用分析2019-08-26 19351
-
LiDAR的工作原理2019-12-05 21007
-
LiDAR的作用是什么,iPhone12Pro如何使用LiDAR2020-11-03 14539
-
LiDAR传感器原理 LiDAR在自动驾驶中的应用2022-11-23 2655
-
Valeo为何坚守着LiDAR?2024-02-21 1980
-
激光雷达LIDAR基本工作原理2024-03-05 10009
-
激光雷达(LiDAR)技术方案与工作原理全解析2025-04-25 3090
全部0条评论

快来发表一下你的评论吧 !
