

完整ToF激光测距仪方案(电路图+BOM表+PCB布线图)
今日头条
描述
激光测距仪(Laser rangefinder)是利用激光的飞行时间(ToF)实现对目标距离测量的仪器,可以满足日常生活和工业自动化等基本测量要求,例如距离测量、面积测量、体积测量、高度追踪等。
激光测距有一维、二维、三维3种。通过无线通讯功能,可以直接在上位机(PC端或者手机)的应用得到二维或者三维模型,同时只需合适的反射物,室内测量操作,或者室外地形勘探都能获取高精度的测量值。如果硬件电路设计良好,再搭配激光测距算法,就能测得误差在毫米级别的距离值。
激光测距的方式有许多种,本方案所使用的是飞行时间(ToF)方法中的相位法,优点是精度较高,精度可到达毫米等级。但相位法需要较复杂的计算,测量过程中使用到异步采集同步化、差频测相、傅利叶转换、距离合成等。本文将以上复杂的操作原理整理成此方案,提供客户直接参考使用,以有效减少客户的産品开发的周期。
方案特点
激光测量比超声波测量更加精准,且较不易受到外界干扰,但需要复杂且快速的计算,因此需搭配32位Arm Cortex-M0+核心的HT32F52352 MCU。
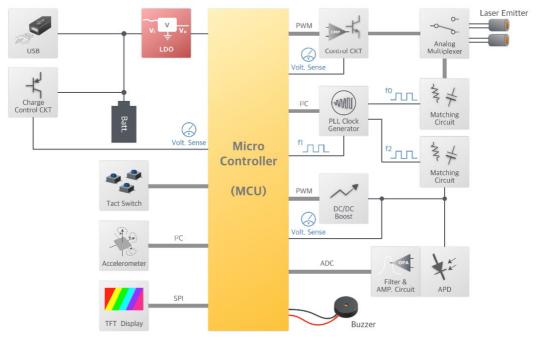 图1. ToF激光测距原理
图1. ToF激光测距原理
方案采用ToF相位法,测量激光往返所産生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离,即用间接方法测定出光往返测线所需的时间,理论测量精度可达到mm量级。
本方案采用3.3V~4.2V(或USB供电),屏幕采用2.0吋176×220 TFT彩屏,工作温度0℃~40℃,待机耗电3.0μA,开机耗电157mA,产品量程0.2m~60m,实现了±(1.5mm + 2.3×10-4D)精度(D为测量距离)。
硬件设计
激光测距仪由主控板、激光接收板和按键板组成,主控板MCU爲HT32F52352,负责控制激光发射与接收,并计算出测距仪与物体之间的距离,激光接收板主要负责激光回波信号的接收与放大,将放大后的信号送回主控MCU。
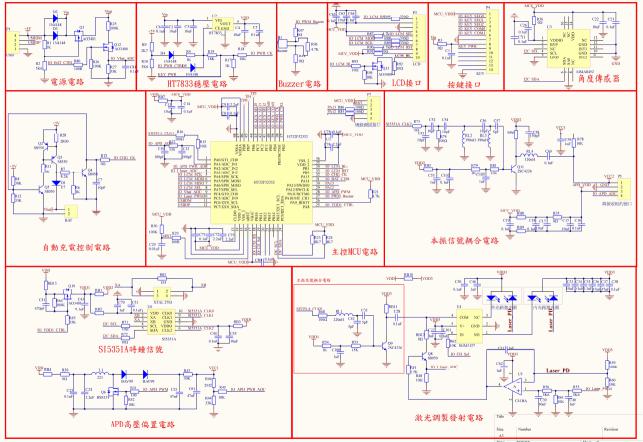 图2. ToF激光测距仪方案电路功能图
图2. ToF激光测距仪方案电路功能图
激光测距仪主控板依功能可区分爲主控MCU电路、电源控制电路、加速度传感器电路、APD高压偏置电路、振荡信号耦合电路、激光调制发射电路;主控MCU电路包含上述所说的HT32F52352与周边基本电路;电源控制电路包含USB供电、电池充电管理、芯片电源稳压等,电源相关控制;通过加速度传感器电路可得到産品目前的姿态,计算出角度可以再进行更多不同模式的计算,例如一次勾股、二次勾股、垂直测量、水平测量等等;APD高压偏置电路负责提供激光接收所需的电压,通过控制电压可调整激光回波接收的灵敏度;振荡信号耦合电路爲激光发射时,迭加上一高频信号,并在激光接收回波时,使用一频率与回波信号进行耦合,通过差频测相取得回波信号相位;激光调制电路爲调整激光发射时的功率控制。
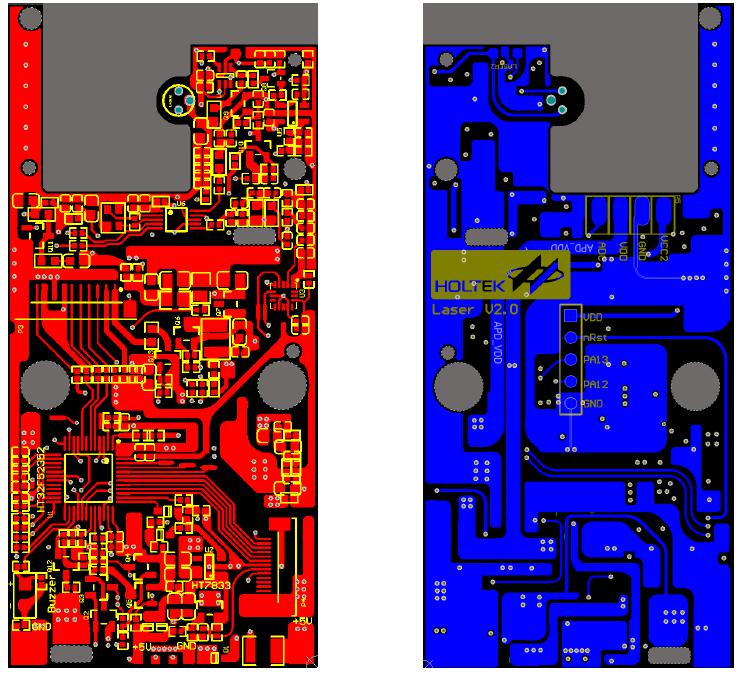 图3. PCB Layout正面及反面
图3. PCB Layout正面及反面
本激光测距仪采用相位测量法,因此使用两颗激光发射头(内、外光路),并由同一接收头接收激光的回波信号,通过内、外两路不同的激光信号相位差可推算出测距仪与物体之间的距离,当测距仪与物体之间距离较短时,内、外光路的相位差值较小,反之若物体较远时,内、外光路的相位差值会增加。相位计算需使用到快速傅里叶变换(FFT),并使用多个不同频率对同一距离的待测物进行测量,才可取得准确的距离。
标准化BOM
本方案以HT32F52352主控MCU,结合Holtek自行开发的算法完成激光测距,具有距离测量、角度计算 (可延伸其他功能),可满足激光信号的信号捕捉,测量时间<400ms/次,并有效缩小相位计算时的误差;48MHz核心速度、26.5KB闪存、4.3KB SRAM,让激光测距仪在500ms可快速计算出物体距离。
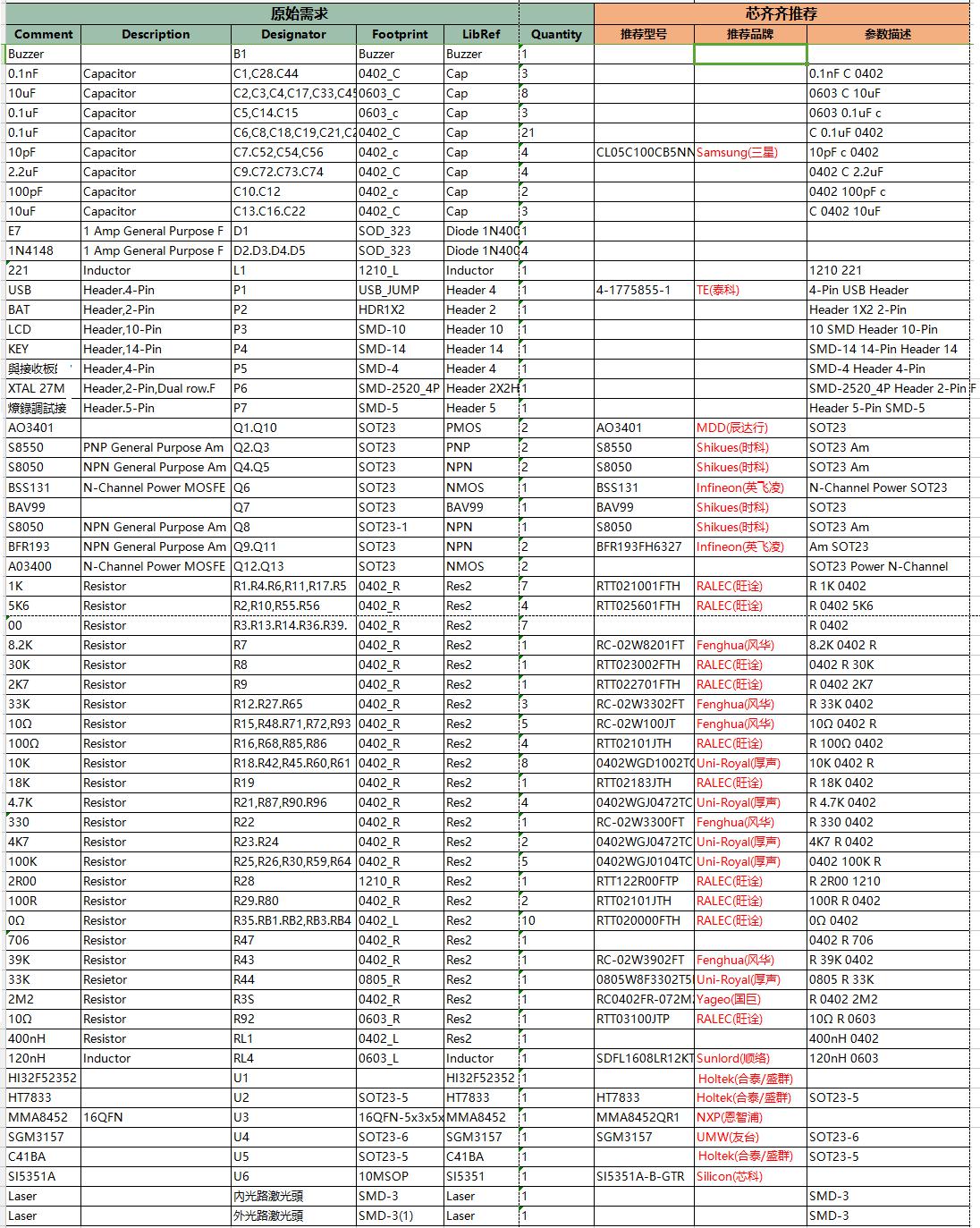 图4. BOM表及选型推荐
图4. BOM表及选型推荐
芯齐齐智能BOM分析工具显示,本方案HT32F52352主控MCU、LDO芯片HT7833及放大器C418A由合泰/盛群原厂提供,用来检测角度的MMA8452Q加速度传感器由NXP提供,时钟芯片SI5351由芯科供应,其他元器件都有多家货源。另外,该方案的原始BOM表中还存在一些错误,我们已通过芯齐齐工具进行了校正。
审核编辑:鄢孟繁
-
 jf_30500371
2024-08-19
0 回复 举报求分享一份高清原理图 收起回复
jf_30500371
2024-08-19
0 回复 举报求分享一份高清原理图 收起回复
-
 jf_72386012
2023-02-28
0 回复 举报可以卖一份方案给我吗13603026558 收起回复
jf_72386012
2023-02-28
0 回复 举报可以卖一份方案给我吗13603026558 收起回复
-
激光测距仪工作原理 晶振在激光测距仪的作用2024-01-25 3479
-
相位式激光测距仪全套方案2022-10-13 12421
-
电动牙刷完整解决方案(电路图+BOM表+PCB布线图)2022-01-17 26919
-
高精度激光测距仪原理图.PDF2021-12-13 4030
-
影响激光测距仪价格的原因有哪些2021-05-20 1989
-
红外测距仪和激光测距仪区别2021-03-08 20757
-
红外测距仪原理_红外测距仪的结构2020-02-27 10088
-
激光测距仪的原理_激光测距仪是怎样工作的2019-11-08 14068
-
浅谈激光测距仪的原理及使用方法2018-03-13 10476
-
激光测距仪的原理、使用方法以及日常维护2018-01-31 7804
-
激光测距仪2013-04-14 6946
-
超声波测距仪与激光测距仪的区别2011-12-15 9155
-
激光测距仪的原理和应用2010-03-02 10400
-
激光测距仪基本知识2009-12-25 1837
全部0条评论

快来发表一下你的评论吧 !
