

北斗GPS同步时钟(授时系统)技术原理详解
描述
1. 前言
由计算机网络系统组成的 分布式系统 ,若想协调一致进行: IT 行业的 “ 整点开拍 ” 、 “ 秒杀 ” 、 “Leader 选举 ” ,通信行业的 “ 同步组网 ” 之类业务处理,毫秒级甚至微秒级的 时间同步 是重要基础之一。
2. 术语描述
2.0 世界时
世界时 UT ,可以简单理解为按照地球自转一周来计量 24 小时的时间标准,由于地球自转速率的变化,世界时的秒长会有微小的变化,每天的快慢可以达到千分之几秒。
2.1 TAI 时间
世界时不准,因此国际组织定义了 TAI 时间 , 即国际原子时( International Atomic Time ),其起点是 1958 年的开始(世界时 UT ),以铯原子钟走秒连续计时的时间。
2.2 UTC 时间
计算机网络普遍使用的 UTC 时间(协调世界时) ,由国际计量局 BIPM 综合全世界多个守时实验室的钟组计算得到,为了使 UTC 时间与地球自转 1 天的时间(世界时 UT )协调一致,每隔 1 到 2 年, BIPM 会通告在 UTC 时间 6 月 30 日或 12 月 31 日最后一分钟 “ 加一秒 ” 或 “ 减一秒 ” 等闰秒调整。也就是说, UTC 时间会出现 60 秒或少了 59 秒的情况。
最近一次闰秒是 UTC 时间 2015 年 6 月底:
2015 年 6 月 30 日, 23 时 59 分 59 秒
2015 年 6 月 30 日, 23 时 59 分 60 秒
2015 年 7 月 1 日, 0 时 0 分 0 秒
由于存在闰秒, UTC 时间与 TAI 时间是有差别的, UTC = TAI - n ,这个 n 现在( 2016 年 1 月)是 36 秒,也就是说 UTC 时间比 TAI 时间慢了 36 秒。
2.3 北京时间
北京时间也就是 东八区时间 ,在 UTC 时间基础上加 8 小时,中国的北京标准时间由位于陕西的国家授时中心发播。
2.4 GPS 时间
由 GPS 系统通过卫星信号发播的 原子时间 , GPS 时间用自 1980 年 1 月 6 日零点( UTC 时间)起的星期数和该星期内内的秒数来表示。
工程上, GPS 接收机会根据闰秒数将 GPS 时间换算为我们通常使用的 UTC 时间。 GPS 时间的源头是美国海军天文台的守时原子钟组。
2.5 北斗( BDS )时间
由北斗卫星导航系统通过卫星信号发播的 原子时间 ,同样,北斗接收机会根据闰秒数将北斗时间换算为我们通常使用的 UTC 时间。
北斗时间的时钟源是位于北京的解放军 时频中心 的守时原子钟组,陕西的国家授时中心好尴尬 :( 。
2.6 频率
时间的导数就是 频率 ,机械发条、石英晶体振荡器、原子钟等各种时钟源通过产生频率信号,按照频率均匀打拍计数,模拟时间的等间隔流逝,就有了可见的 “ 时间 ” 。
2.7 频率准确度
手表有准和不准的,反映的就是频率准不准,时钟频率和标准频率的偏差可以用 频率准确度 来衡量。 1E-9 量级表示 1 秒会差 1ns ,我们使用的个人电脑,它的守时时钟是个 32. 768kHz 的石英晶振,准确度大概只有 2E-5 量级( 20ppm ),也就是说 1 秒会差 0.02ms , 1 天会跑偏大概 2 秒。
2.8 时间同步
广义的 “ 时间同步 ” 包括的 时间和频率 的同步。上级时钟将时间频率信号通过各种有线(以太网、 SDH 数字网、同轴电缆、电话等)、无线(卫星、长波、电台、微波、 WIFI 、 Zigbee 等)链路传递给下级时钟,下级时钟接受时间频率信息后,与上级时钟保持相位、频率的一致。
3. 时间同步原理
3.1 单向授时
上级时钟主动发播时间信息,下级用户端被动接受时间信息,并调整本地时钟使时差控制在一定范围内。
要想提高授时精度,用户端必须计算出时间信息在传播链路中的延时, GPS/ 北斗等卫星授时,可以通过用户端定位与卫星之间距离确定电磁传输延时,消除大部分误差,而电缆、网络等如果是单向授时方式就无法准确计算单向链路时延了。
3.2 双向授时
用户端将接受的时间信息原路返回给上级时钟服务端,服务端将往返时间除以二即得到单向链路时延,再把单向时延告诉客户端,在此基础上,客户端得到服务端更准确的时间信息。比如:北斗单向卫星授时精度 100ns ,双向卫星授时精度可做到 20ns 。
3.3 网络时间同步
网络时间同步,特指在计算机网络内的服务器与客户端之间利用 网络报文 交换实现的时间同步。
鉴于计算机网络传输路径的不确定性和中间路由交换设备转发报文时间的不确定性,通过单播或多播实现的单向网络授时是不可靠的。因此,前辈们发明的网络时间同步技术 NTP/PTP 等,基本原理都是通过对网络报文打时间戳(标记),往返交换报文计算传输时延和同步误差。
3.4 频率同步
频率同步 指的是主从时钟的频率误差保持在一定范围内,频率同步有 2 种类型 :
第 1 种是直接传递模拟频率信号,比如用电缆或光缆传递 10MHz 、 5Mhz 、 2.048MHz 等标准频率,或者传递 bit 位宽脉冲;
第 2 种是通过测量得到的主从时钟时差,通过锁定主从相差实现频率锁定( PLL ),或者间接计算频率偏差,完成频率修正。
4. 计算机网络时间同步
计算机网络时间同步只是时间同步的一种应用场景,其时间传递的链路可能是 SDH 网、以太网、 WIFI 无线网络等。
4.1 NTP
( Network Time Protocol )从 1985 年诞生来,目前仍在在大部分的计算机网络中起着同步系统时间的作用。
- 基本原理
服务器和客户端之间通过二次报文交换,确定主从时间误差,客户端校准本地计算机时间,完成时间同步,有条件的话进一步校准本地时钟频率。
- 时间同步过程
服务器在 UDP 的 132 端口提供授时服务,客户端发送附带 T1 时间戳( Timestamp )的查询报文给服务器,服务器在该报文上添加到达时刻 T2 和响应报文发送时刻 T3 ,客户端记录响应报到达时刻 T4 。
改个维基的图:
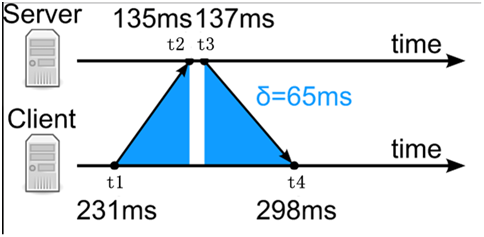
- 时差计算
维基这个图中用蓝色标注了主从直接来回链路的 时延 Sigma :
Sigma = (t4-t1)-(t3-t2)
因此,假设来回网络链路是对称的,即传输时延相等,那么可以计算客户端与服务器之间的 时间误差 Delta 为:
Delta = t2-t1-Sigma/2=((t2-t1)+(t3-t4))/2
客户端调整自身的时间 Delta ,即可完成一次时间同步。
- 计时方式
NTP 采用 UTC 时间计时, NTP 时间戳 包括自 1900-01-01 00:00:00 开始的 UTC 总秒数,当前秒的亚秒数。
当正闰秒时, 60 秒和下一分钟的 0 秒的 NTP 总秒数一致的,因此 NTP 报文专门定义了闰秒指示域来提示。
- 误差分析
局域网内计算机利用 NTP 协议进行时间同步,时间同步精度在 5ms 左右,主要误差包括:
1 )计算机打时间戳的位置在应用层,受协议栈缓存、任务调度等影响,不能在网络报文到来时马上打戳;
2 )各种中间网络传输设备带来的传输时延不确定性以及链路的不对称性,将进一步降低 NTP 时间同步精度。
4.2 PTP
为克服 NTP 的各种缺点, PTP(Precision Time Protocol ,精确时间同步协议 ) 应运而生,最新协议是 ,可实现亚微秒量级的时间同步精度。
- 基本原理
主从节点在网络链路层打时间戳,利用支持 IEEE1588 协议的 PHY 片,精准记录时间同步网络报文接受或发送的时刻。交换机、路由器等网络中间节点准确记录时间同步报文在其中停留的时间,实现对链路时延的准确计算。
- 时间同步过程
PTP 默认使用 组播 协议,二层或四层 UDP 组播都可以,一般我们使用基于 UDP 组播,使用 319 和 320 两个端口。
PTP 定义了三种角色: OC 、 BC 和 TC 。我们一般接触的是 OC :主时钟和从时钟,交换机、路由器一般是 BC 或 TC 。
由于硬件性能有限,网络报文发送时记录的时刻信息,可以在随后的 Follow_Up 跟随报文中发出,这就是 PTP 的双步模式 (Two-step) 。
下图是两 OC 主从时钟之间的同步过程:
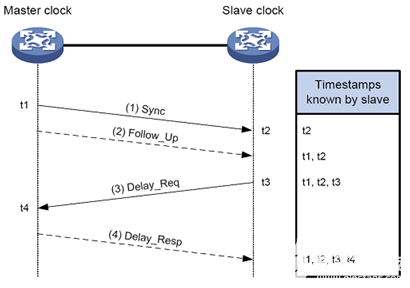
· a. 主时钟向从时钟发送 Sync 报文,并在本地记录发送时间 t1 ;从时钟收到该报文后,记录接收时间 t2 。
· b. 时钟发送 Sync 报文之后,紧接着发送一个携带有 t1 的 Follow_Up 报文。
· c. 从时钟向主时钟发送 Delay_Req 报文,用于发起反向传输延时的计算,并在本地记录发送时间 t3 ;主时钟收到该报文后,记录接收时间 t4 。
· d. 主时钟收到 Delay_Req 报文之后,回复一个携带有 t4 的 Delay_Resp 报文。
- 时差计算
与 NTP 一样的原理,从时钟根据拥有的 t1 ~ t4 这四个时间戳,由此可计算出主、从时钟间的往返总延时为:
Sigma = (t4-t1)-(t3-t2)
假设网络是对称的,从时钟相对于主时钟的时钟偏差为:
Delta = t2-t1-Sigma/2=((t2-t1)+(t3-t4))/2
- 计时方式
与 NTP 不同, PTP 采用 TAI 世界原子时间计时,而且 PTP 计时的起点与 unix 时间一致,即 UTC 时间 1970 年 1 月 1 日 0 点。
PTP 主钟会告知从钟,当前 UTC 相对于 TAI 的累计偏移量,从钟据此计算当前准确的 UTC 时间。
- 误差分析
PTP 能准确记录报文发送和接受的时间,也能计算中间链路的延时,剩下影响最大的就是 网络链路的不对称性 了。
在实际工程中,网络中间链路设备不支持 PTP 协议,大大降低了 PTP 的同步精度。目前, PTP 主要应用在通信同步网、电力同步网等行业网络系统里。
- 同步拓扑
PTP 域中所有的时钟节点都按一定层次组织在一起,可通过 BMC ( Best Master Clock ,最佳主时钟)协议动态选举出最优时钟,最优时钟的时间最终将被同步到整个 PTP 域中。
BMC 算法与 STP ( Spaning Tree Protocl )生成树协议类似,最终形成 无环路 的树形网络拓扑,且都是动态选举,能适应最佳主时钟切换的变化。
- 扩展应用 ——PTP over SDH
充分利用各行业已有的 SDH 通信网络,利用 PTP-E1 信号 转换设备,架设 PTP 同步网络,除了需要考虑链路倒换问题之外, SDH 网络的时延稳定性可大幅提升网络时间同步精度。
4.3 SyncE 同步以太网
以太网最早只能传输数据信号,有另外独立的频率同步网络,随着以太网的快速发展, SyncE ( Synchronized Ethernet ) 同步以太网 技术诞生后,企业们有了新的选择。
- 基本原理
时钟节点利用以太网( 1000M 、 1G 、 10G 等)物理层的空闲间隙,传递 位宽时钟信号 ,实现时钟频率信号( 25M 、 125M 等)的自上而下传递。
- 协议控制
类似于 SDH 网络等时间间隔传递的 SSM 同步状态信息,同步以太网( Sync-E )利用链路层 封装传递 SSM 信息, SSM 信息包含时钟质量信息,接收端据此选择合适的上级网络时钟。
- 应用
一般商业 PHY 片提供 SyncE 功能选项,开启该功能模式,即可利用 PHY 恢复出来的频率信号,校准本地时钟频率或分频后用于本地计时。
审核编辑:符乾江
-
简单阐述GPS北斗同步时钟在电力系统的应用2022-02-16 1498
-
GPS/北斗授时模块是怎样实现授时功能的?2019-07-29 17266
-
GPS北斗同步时钟在电力系统的使用2021-12-17 1180
-
北斗卫星授时系统与GPS授时系统相比优势有哪些?2023-06-14 2253
-
时间同步|GPS授时模块、北斗授时模块的应用场景及选型建议2023-03-09 3985
-
同步时钟:北斗/GPS卫星、电信基站、NTP以太网等多种校时方式的区别2024-03-19 2546
-
NTP电子时钟系统:GPS北斗卫星授时服务下的生活重塑2024-06-03 1611
-
同步时钟:北斗/GPS卫星、电信基站、NTP以太网校时方式的区别2024-06-27 2297
-
GPS北斗双系统:卫星时钟同步 卫星对时装置-安徽京准2024-07-15 2366
-
京准电子:GPS北斗卫星时钟同步系统助力精准教育2024-09-18 1350
-
北斗卫星同步时钟授时天线:实现精确时间同步的关键2025-01-06 3482
-
赛思×三峡集团 | 双北斗时钟同步改造方案,筑牢三峡工程北斗授时安全防线2025-04-18 174
-
GPS同步时钟装置(北斗卫星同步时钟)知识普及2025-06-30 1753
-
双系统授时下 GPS 北斗同步时钟参数介绍2026-05-11 336
-
北斗卫星同步时钟的授时工作原理是什么?2026-07-14 114
全部0条评论

快来发表一下你的评论吧 !
