

如何进行大规模车辆仿真以及场景测试
描述
实现篇:
在理论篇,我们介绍了理论上车辆模拟仿真的情况,那么为了实现车载拥塞场景的仿真,我们需要一些相应的测试仪表、仿真平台和测试用例来实现拥塞场景的模拟工作,整个平台的逻辑示意图如图1所示,有如下几个部分组成和相应的功能模块。
V2X仿真平台CMW500
1. 多车环境接入层模拟
2. PC5 ITS消息的收发,并且控制不同车辆的功率以及物理层资源调度
3. 物理层基带信号衰落模拟
实时卫星模拟器SMBV100B
1. PC5时序同步
2. 产生并实现OBU的路点信息
Canoe.Car2x仿真平台
1. 交通场景编辑以及场景运行,测试结果分析统计
2. V2X传输层以及应用层协议实现
3. 通过CAN/Ethernet实现DUT的HIL测试
车载待测件OBU
1. 测试结果状态分析以及统计
2. ECU HIL监控- Optional
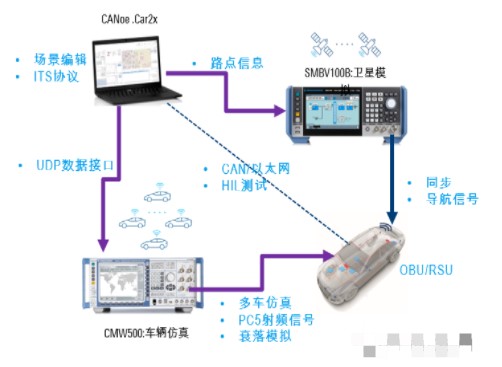
图1. 拥塞测试逻辑框架
基于上述的仿真方案,我们以一个150辆车的仿真实例来看一下如何进行大规模车辆仿真实测。首先我们需要配置Canoe.Car2x跟CMW500的接口进行配置。Canoe.Car2x将通过R&S公司和Vector公司定义的KAA550接口发送UDP数据将上层协议数据通过CMW500发送出去。下图即KAA550的适配接口。
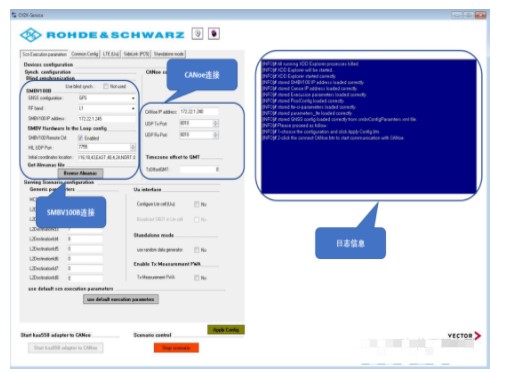
图2. 仪表接口以及连接配置
在Sidelink PC5界面,我们可以对物理层参数以及Fading进行配置。
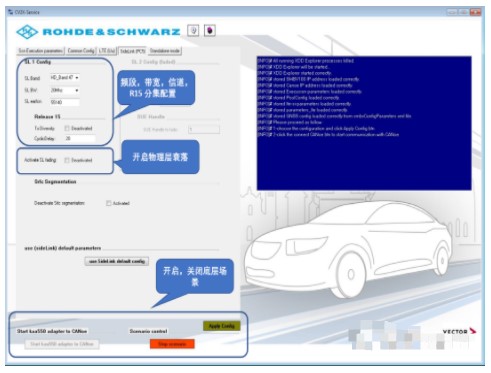
图3. 仪表接口部分物理层配置
Canoe.Car2x测试平台
在完成了Canoe.Car2x,CMW500,SMBV100B的配置之后,就可以在Canoe中进行软件相关配置,场景编辑,场景开发以及测试运行了。如下窗口显示了相关配置信息:
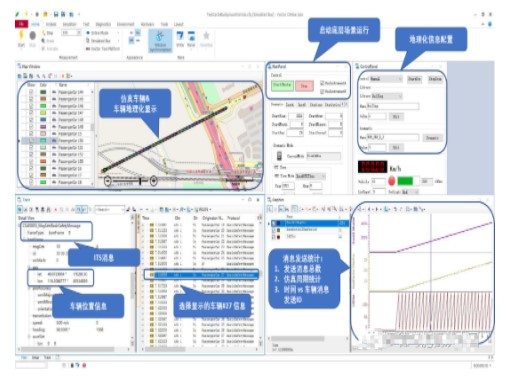
图4. Canoe.Car2x运行界面
消息发送统计:
消息发送分析,这里我们可以在图五中看到消息发送是以100ms为周期进行的,即每100ms会完成150辆车的消息发送。在图六中我们可以看到 8.523时刻时,发送150辆车到21次,第21次中,发送到id的值为34。
由此计算8.523时刻时共发送了:20 × 150 + (34 + 1) = 3035次BSM消息。
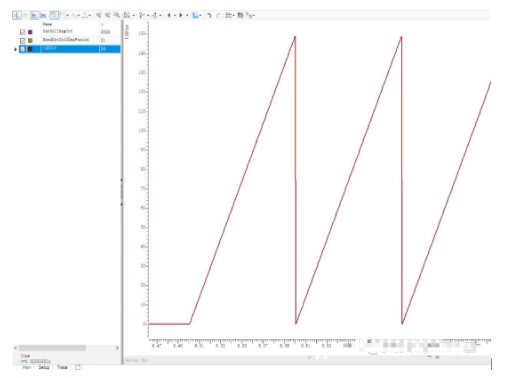
图5. Graphics窗口 时间 vs 车辆ID发送
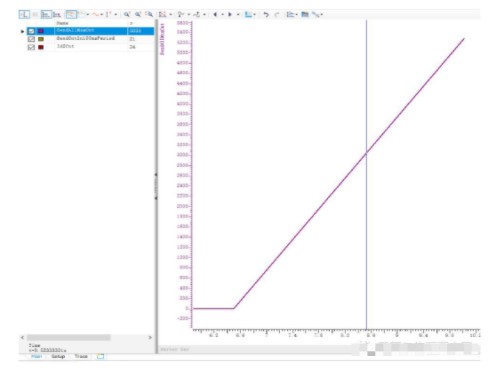
图6. Graphics窗口记录BSM消息发送的个数
DUT端的HIL分析
我们可以同时在OBU的操作软件中同步分析OBU收到的ITS消息的情况,这里记录了在同样的状态下,待测OBU收到了150辆车发送的消息。
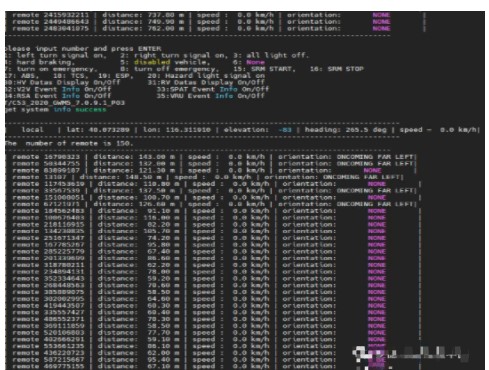
图7. OBU打印log数据
总结
本文介绍的仿真方案和平台可以提供多种功能,例如针对V2X不仅可以实现共计30个基本的DAY1,DAY2的交通模拟场景,也可以支持自定义的场景来进行算法验证,同样也可以稳定支持我们在未来面临拥塞场景的测试挑战。
关于罗德与施瓦茨
罗德与施瓦茨是测试与测量、系统与方案、网络与网络安全领域的领先供应商。公司成立已超过85年,总部设在德国慕尼黑,在全球70多个国家设有子公司。作为一家独立的科技集团,罗德与施瓦茨创新性的产品和解决方案为全球工业及政府客户提供了一个更安全与互联的世界。截至2021年6月30日,罗德与施瓦茨公司在全球拥有约13000名员工。
原文标题:聊聊C-V2X拥塞测试的那些事儿之:从理论到现实
文章出处:【微信公众号:罗德与施瓦茨中国】欢迎添加关注!文章转载请注明出处。
审核编辑:汤梓红
-
如何选择适合的智驾仿真工具进行场景生成和测试?2025-11-25 671
-
电源如何进行效率测试2022-12-01 2919
-
如何进行一个proteus仿真STM32的测试呢2021-11-25 2083
-
基于Simulink的数据链系统如何进行仿真测试?2021-04-29 2082
-
怎么实现大规模电动汽车的生产2021-01-27 1561
-
什么是EMC测试_如何进行EMC测试2020-05-12 19797
-
大规模MIMO的性能2019-07-17 2598
-
大规模天线技术商用测试2019-06-13 1772
-
5G大规模MIMO天线阵列3D OTA测试2019-06-10 4233
-
如何进行安全的自动驾驶大规模部署2019-04-29 4248
-
大规模多节点柔性直流控制保护仿真测试方法研究2017-12-15 1050
-
探讨采用C6000系列多核DSP的并行计算(OpenCL、OpenMP)实现大规模电磁系统的暂态仿真及其控制系统2016-12-03 8497
-
5G大规模多入多出(MIMO)测试台:从理论到现实2014-12-24 12651
-
Veloce平台在大规模SOC仿真验证中的应用2010-05-28 2402
全部0条评论

快来发表一下你的评论吧 !
