

 STM32设计的儿童老人GPS防丢定位手环
STM32设计的儿童老人GPS防丢定位手环
描述
一、环境介绍
MCU: STM32F103C8T6
GSM模块: GA6--果云
开发软件: Keil5
二、GA6-GSM模块介绍与调试
说明: GA6-B模块供电必须5V,采用电脑USB供电可能不稳定(没有5V,只有4.8V左右),导致模块使用不稳定,发送AT指令没有反应,调试阶段,可将开发板的USB线连接充电宝或者手机充电插头取电。
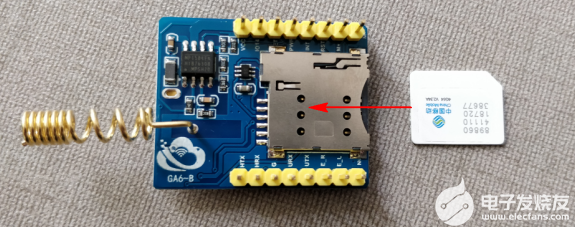
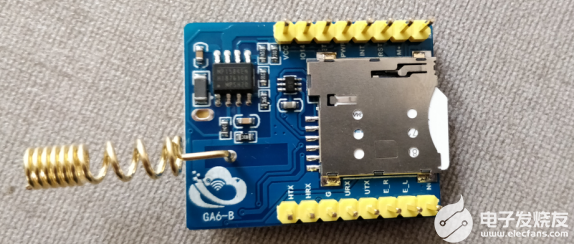
2.1 GA6-B模块概述
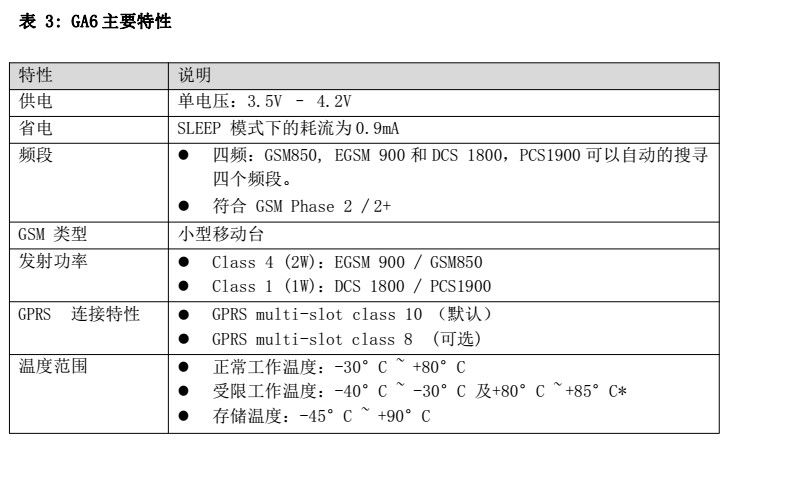
GA6-B 模组:
1. GA6 尺寸 22.8mm x 16.8mm x 2.2 mm;
2. 正常工作温度:-30°C ~ +80°C,
3. 受限工作温度:-40°C ~ -30°C 及+80°C ~+85°C*
4. 工作电压 3.5V-4.2V;
5. 开机电压>3.5V;
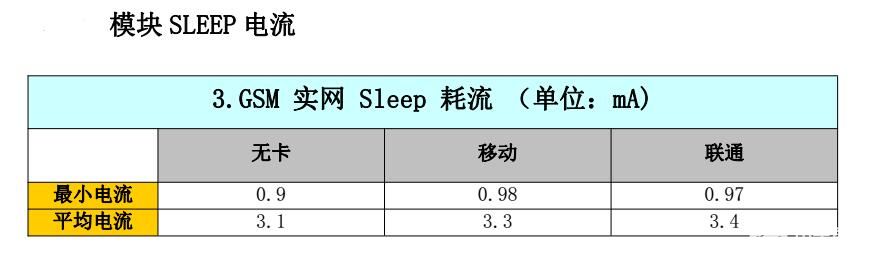
6. SLEEP 模式下的耗流为 0.9mA;
7. 四频:GSM850, EGSM 900 和 DCS 1800,PCS1900 可以自动的搜寻 四个频段。 l 符合 GSM Phase 2 / 2+ l GPRS Class 10;
8. 灵敏度<-107;
9. 支持语音通话;
10. 支持 SMS 短信;
11. 支持移动和联通2G,以及全球的GSM网络
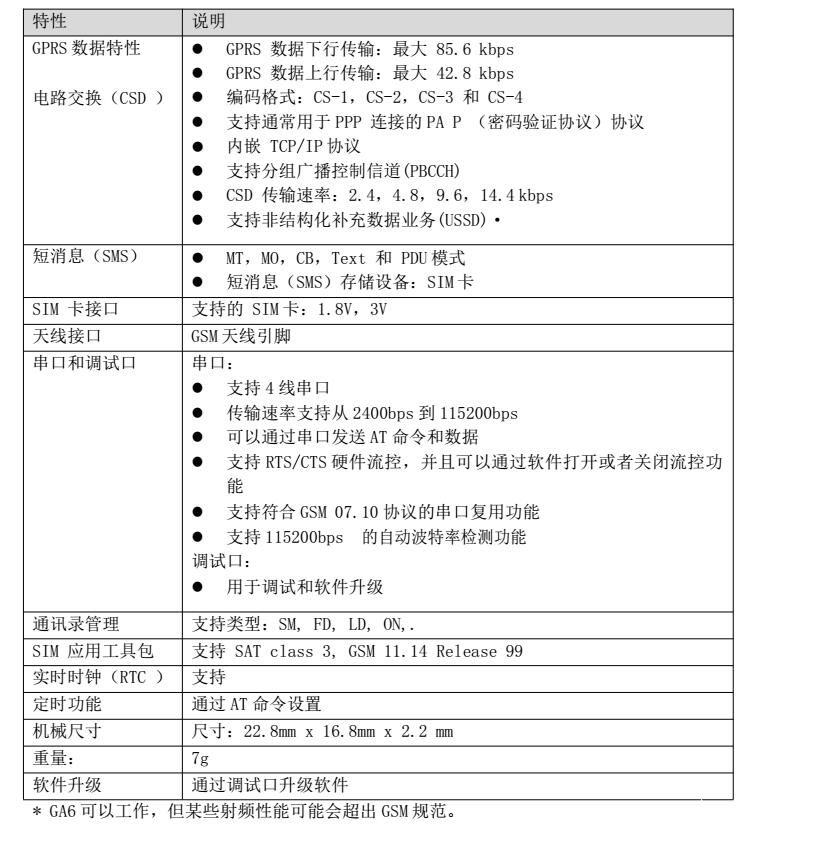
12. GPRS 数据特性,最大数据速率,下载 85.6Kbps,上传 42.8Kbps;
13. 支持符合 GSM 07.10 协议的串口复用功能
14. 支持 2 个串口,一个下载串口,一个 AT 命令口;
15. AT 命令支持标准 AT 和 TCP/IP 命令接口;
16. 支持数字音频和模拟音频,支持 HR,FR,EFR,AMR 语音编码;
17. 支持FCC,CE认证;
18. SMT 42PIN 封装;
GA6模块的优势
广域覆盖:GPRS在全国34个省均有良好覆盖,更是全球通行的2G通讯标准。基本上在手机可以打电话的地方都可以通过GPRS无线上网;
永远在线:只要激活GPRS应用后,将一直保持在线,类似于无线专线网络服务。
按量计费:GPRS服务虽然保持一直在线,但您不必担心费用问题;因为只有产生通信流量时才计费。
高速传输:目前GPRS可支持85.6Kbps的峰值传输速率,理论峰值传输可达100余Kbps。
价格便宜 :相对于 SIM 系列的模块 价格只有其的一半。大大降低了物联网设备的入门门槛凭借超小的尺寸,超低功耗和宽工作温度范围,GA6是M2M应用的理想解决方案,适用于车载、工业及PDA、个人跟踪、电力环境检测、无线POS、智能计量以及其它M2M的应用,为其提供完善的GSM/GPRS短信、数据传输及语音服务。






物联网卡:


2.2 GA6模块调试
模块默认波特率: 115200
电压: 5V
TX---URX(GA6模块)
RX---UTX(GA6模块)

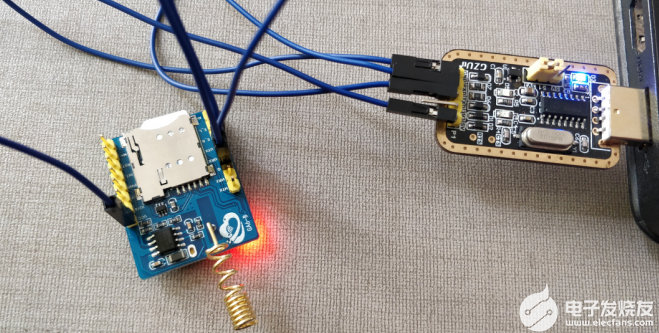
- 模块上电串口助手收到的消息:

注意: 电压必须5V否则,给模块发送AT指令没有用。
- 正常情况下,模块插上SIM电话卡,供电达到5V时,模块上电会返回以下提示信息。

当模块出现 “SMS Ready”字符串提示时,说明模块已经可以正常的接收“AT”指令了。
2.3 基础常用的指令介绍使用
(指令结尾发送都需要加\r\n)
1. 检测模块是否正常
|
给模块发送指令: AT
模块正常返回,这个指令可以检测模块是否正常: OK |
2. 查询SIM卡是否在卡槽内
|
给模块发送指令: AT+CPIN?
如果卡在卡槽内,模块正常返回值: +CPIN:READY
OK |
3. 查询模块是否注册到网络
|
给模块发送指令: AT+CREG?
如果模块已经正常注册到网络的返回值: AT+CREG?
+CREG: 1,1
OK |
4. 关闭指令回显
|
给模块发送指令: ATE0
指令执行成功返回值: (关闭AT指令回显,方便调试,提高程序效率) OK |
2.4 GPRS网络通信相关指令介绍
1. 查询网络连接状态
|
给模块发送指令: AT+CIPSTATUS
指令执行成功返回值如下(多种): "IP INITIAL" 初始化 "IP START" 启动任务 "IP CONFIG" 配置场景 "IP IND" 激活 GPRS/CSD 场景中 "IP GPRSACT" 接收场景配置 "IP STATUS" 获得本地 IP 地址(参考 AT+CIFSR 命令) "TCP CONNECTING" TCP 连接中 "UDP CONNECTING" UDP 连接中 "IP CLOSE" TCP/UDP 连接关闭 "CONNECT OK" TCP/UDP 连接成功 ,连接成功之后才可进行网络数据通信 |
2. 附着GPRS网络 (进行网络通信前,需要先附着GPRS网络才可进行正常通信)
|
给模块发送指令: AT+CGATT=1
模块正常附着了GPRS网络,返回值: (注意该指令第一次附着网络需要点时间,需等待一段时间) OK |
3. 激活GPRS网络
|
给模块发送指令: AT+CGACT=1,1
模块正常激活了GPRS网络返回值: OK |
4. 建立TCP连接: 连接TCP服务器
|
模块发送指令: AT+CIPSTART="TCP","183.230.40.33",80
如果服务器正常连接成功的返回值: OK
CONNECT OK |
说明: 上面的指令是采用TCP协议连接,183.230.40.33服务器,端口号是80。
5. 发送数据
|
给模块发送指令: AT+CIPSEND
如果收到指令后会返回 > 符号。,接下来就可以发送 实际要发送的数据,在发送实际数据时,不需要加回车符(\r\n)。
实际数据发送之后,紧接着发送一个0x1A,即可启动数据发送。 注意: 0x1A是十六进制格式数据,不是字符串。
如果数据发送成功,会返回 “SEND OK” 字符串。 |
发送数据示例:
|
POST /devices/517704007/datapoints HTTP/1.1 api-key:vvQAUiBG=HwKzqGicH=RxBvFCDw= Host:api.heclouds.com Connection:close Content-Length:65
{"datastreams":[{"id":"ds18b20","datapoints":[{"value":66.66}]}]} |

三、STM32代码调试GA6模块
3.1 通过STM32串口代码测试GA6模块
直接接在STM32F103C8T6最小系统板上面:

注意: 如果是使用USB给开发板供电,为了防止电压不够,USB线不要接分线器,直接接电脑的USB口。
因为GA6模块的电压必须5V才可驱动,4.8V都不行。

STM32F103C8T6最小系统板使用串口3与GA6-B模块连接:
|
5V-----5V GND---G PB10—URX PB11---UTX |

出现以上提示之后,发送AT能返回OK就说明模块已经正常工作了。

模块上电会返回以下信息: (注意: 电压一定要保证是5V)
|
AT Ready
AST_POWERON
+NITZ:19/03/20,01:57:46,32
Call Ready
+CREG: 1
SMS Ready |
3.2 通过STM32封装标准函数(使用HTTP协议连接OneNet服务器)
GA6_GPRS.c文件代码:
#include "ga6_gprs.h"
#define GS6_GSM_CHECK_CNT 10
/*
函数功能:向GA6_GPRS发送指令
函数参数:
char *cmd :发送的指令
char *check :检查返回的字符串
u32 wait_time :等待的时间(100ms)为单位
说明:该函数只是适用于成功后返回OK的指令
返回值: 0表示成功 1表示失败
*/
u8 GA6_GSM_SendCmd(char *cmd,char *check,u32 wait_time)
{
u32 i,j;
for(i=0;i",50))return 1;
/*2.2 发送实际要发送的数据*/
USART_X_SendData(USART3,data,len);
/*2.3 结束数据发送*/
if(GA6_GSM_SendCmd(end_char,"SEND OK",100))return 2;
return 0;
}
;i++)>
GA6_GPRS.h文件代码:
#ifndef GA6_GPRS
#define GA6_GPRS
#include "stm32f10x.h"
#include "usart.h"
#include "delay.h"
u8 GA6_GSM_StateCheck(void);
u8 GA6_GSM_SendDataToServer(u8 *data,u32 len);
u8 GA6_GSM_ConnectServer(char *server_ip,u32 port);
u8 GA6_GSM_SendCmd(char *cmd,char *check,u32 wait_time);
#endif
Main.c代码
#include "stm32f10x.h"
#include
#include
#include "ga6_gprs.h"
#include "usart.h"
#include "timer.h"
#include "led.h"
#include "key.h"
//u8 onenet_http_cmd[]=
//{
// "POST /devices/517704007/datapoints HTTP/1.1\r\n"\
// "api-key:vvQAUiBG=HwKzqGicH=RxBvFCDw=\r\n"\
// "Host:api.heclouds.com\r\n"\
// "Connection:close\r\n"\
// "Content-Length:65\r\n"\
// "\r\n"\
// "{\"datastreams\":[{\"id\":\"ds18b20\",\"datapoints\":[{\"value\":88.88}]}]}"
//};
u8 onenet_http_cmd[]=
{
"POST /devices/517620924/datapoints HTTP/1.1\r\n"\
"api-key:OCZ6ghYPdky3=FJQCOEVZbByHRM=\r\n"\
"Host:api.heclouds.com\r\n"\
"Connection:close\r\n"\
"Content-Length:62\r\n"\
"\r\n"\
"{\"datastreams\":[{\"id\":\"temp\",\"datapoints\":[{\"value\":88.88}]}]}"
};
//应用发布地址: https://open.iot.10086.cn/iotbox/appsquare/appview?openid=905ef1b56ba526fdeee0c69a0787f176
/*
以下程序正确运行返回的数据:
+NITZ:19/03/20,14:45:27,32
Call Ready
+CREG: 1
SMS Ready
发送一次数据!
GA6_GSM_StateCheck=0
GA6_GSM_ConnectServer=0
GA6_GSM_SendDataToServer=0
SEND OK
HTTP/1.1 200 OK
Date: Wed, 20 Mar 2019 14:45:40 GMT
Content-Type: application/json
Content-Length: 26
Connection: close
Server: Apache-Coyote/1.1
Pragma: no-cache
{"errno":0,"error":"succ"}
CLOSED
*/
int main()
{
u8 key,state;
LED_Init();
KEY_Init();
BEEP_Init();
TIM1_Init(72,20000); //辅助串口1接收,超时时间为20ms
USART_X_Init(USART1,72,115200);
TIM2_Init(72,20000);//辅助串口2接收,超时时间为20ms
USART_X_Init(USART2,36,9600);
TIM3_Init(72,20000);//辅助串口3接收,超时时间为20ms
USART_X_Init(USART3,36,115200);
printf("UART1 OK.....\n");
while(1)
{
if(USART3_RX_FLAG)
{
USART3_RX_BUFF[USART3_RX_CNT]='\0';
//printf("buff=%s,cnt=%d\n\n",USART3_RX_BUFF,USART3_RX_CNT);
printf("%s",USART3_RX_BUFF);
USART3_RX_CNT=0;
USART3_RX_FLAG=0;
memset(USART3_RX_BUFF,0,sizeof(USART3_RX_BUFF));
}
key=KEY_Scanf();
if(key)
{
LED0=!LED0;
LED1=!LED1;
printf("发送一次数据!\n");
/*1. 检查GSM工作状态*/
state=GA6_GSM_StateCheck();
printf("GA6_GSM_StateCheck=%d\n",state);
if(!state)
{
/*2. 连接服务器*/
state=GA6_GSM_ConnectServer("183.230.40.33",80);
printf("GA6_GSM_ConnectServer=%d\n",state);
if(!state)
{
/*3. 向服务器发送数据*/
state=GA6_GSM_SendDataToServer(onenet_http_cmd,strlen((char*)onenet_http_cmd));
printf("GA6_GSM_SendDataToServer=%d\n",state);
}
else
{
//手动断开服务器连接
printf("断开服务器连接:%d\r\n",GA6_GSM_SendCmd("AT+CIPCLOSE\r\n","OK",5000));
}
}
}
}
}
3.3 GA6-B模块使用HTTP协议连接OneNet服务器上传GPS经纬度
为了提高效率,通过GPS配置软件,可以将GPS模块配置成功以下选项:

主要修改的地方:
- GPS模块默认波特率为9600,配置成115200
- 输出的语句,只是输出RMC(推荐定位信息),因为现在只需要经纬度信息即可。
- 系统设置热启动状态,提高定位速度
|
经纬度格式分为三种: 度: ( ddd.ddddd °) 十进制小数部分(5位) 度 . 分 : (ddd°mm.mmm’ ) 十进制小数部分(3位) 度 . 分 . 秒 :(ddd°mm’ss’’)
关系: 一度(°)等于60分钟(’)等于3600秒(“): 整度(d)等于十进制的度的整数部分(dd): 分钟(m)等于十进制的度的整数部分(dd)减去整数度(d)的60倍: 秒(s)等于十进制的度(dd)减去整数度(d)减分(M)除以60乘以3600: |
GPS.c文件代码示例:
#include "gps.h"
/*
函数功能:从buf里面得到第cnt个逗号所在的位置
返 回 值:0~254,代表逗号所在位置的偏移.
255,代表不存在第cnt个逗号
*/
u8 GPS_GetCommaOffset(char *buf,u8 cnt)
{
char *p=buf;
while(cnt)
{
if(*buf=='*'||*buf<' '||*buf>'z')return 255;//遇到'*'或者非法字符,则不存在第cx个逗号
if(*buf==',')cnt--;
buf++;
}
return buf-p; //计算偏移量
}
/*
函数功能: 获取GPS经纬度数据值
函数参数:
double *Longitude :经度
double *latitude :纬度
返回值: 0表示定位成功,1表示定位失败
说明: 解析$GNRMC命令,得到经纬度
$GNRMC,023705.000,A,2842.4164,N,11549.5713,E,1.73,91.65,150319,,,A*41
转换公式示例:
经度: dddmm.mmmm 东经 11408.4790 114+(08.4790/60)=114.141317
纬度: ddmm.mmmm 北纬 2236.9453 22+(36.9453/60)= 22.615755
*/
u8 GPS_GNRMC_Decoding(char *gps_buffer,double *Longitude,double *latitude)
{
u8 Offset;
u32 int_data;
double s_Longitude,s_latitude;
char *p;
/*1. 确定下定位是否成功*/
p=strstr(gps_buffer,"$GNRMC");
if(!p)return 1;
Offset=GPS_GetCommaOffset(p,2);
if(Offset==255)return 2;
if(*(p+Offset)!='A')return 3; //定位不准确
/*2. 得到纬度*/
Offset=GPS_GetCommaOffset(p,3);
if(Offset==255)return 4;
sscanf(p+Offset,"%lf",&s_latitude);
// printf("转换前的纬度:%lf\r\n",s_latitude);
s_latitude=s_latitude/100;
int_data=s_latitude;//得到纬度整数部分
s_latitude=s_latitude-int_data;//得到纬度小数部分
s_latitude=(s_latitude)*100;
*latitude=int_data+(s_latitude/60.0); //得到转换后的值
// printf("转换后的纬度: %lf\r\n",*latitude);
/*3. 得到经度*/
Offset=GPS_GetCommaOffset(p,5);
if(Offset==255)return 5;
sscanf(p+Offset,"%lf",&s_Longitude);
// printf("转换前的经度:%lf\r\n",s_Longitude);
s_Longitude=s_Longitude/100;
int_data=s_Longitude;//得到经度整数部分
s_Longitude=s_Longitude-int_data; //得到经度小数部分
s_Longitude=s_Longitude*100;
*Longitude=int_data+(s_Longitude/60.0);
// printf("转换后的经度:%lf\r\n",*Longitude);
return 0;
}
GPS.h代码示例
#ifndef GPS_H
#define GPS_H
#include "stm32f10x.h"
#include
#include "usart.h"
u8 GPS_GNRMC_Decoding(char *gps_buffer,double *Longitude,double *latitude);
#endif
Main.c代码示例
#include "stm32f10x.h"
#include
#include
#include "ga6_gprs.h"
#include "usart.h"
#include "timer.h"
#include "led.h"
#include "key.h"
#include "gps.h"
char onenet_http_cmd[1024];
//应用发布地址: https://open.iot.10086.cn/iotbox/appsquare/appview?openid=fd1307a02210acbef4b34de89d6cfe21
/*
GPS 接线方式: 将 GPS 模块的 TX 脚与 PA3 相连接。 (串口 2 的接收脚)
GPS 模块波特率默认为 9600 (为了提高速度,可以将GPS的波特率设置成115200---可直接通过上位机软件设置)
GPS 模块型号: ATGM336H-5N
电 源: 3V
*/
/*
GA6-GSM 接线方式: 将 GA6-GSM 模块的 UTX 脚与 PB11 相连接,URX 脚与 PB10 相连接。 (串口 3 的接收脚)
GA6-GSM 模块波特率默认为 115200
GA6-GSM 模块型号: 果云GA6-B
电 源: 5V
*/
int main()
{
double Longitude,latitude;
u8 state;
u32 time_cnt=0;
u16 data_tx_len=0;
char temp_buff[50];
LED_Init();
KEY_Init();
BEEP_Init();
TIM1_Init(72,20000); //辅助串口1接收,超时时间为20ms
USART_X_Init(USART1,72,115200);
TIM2_Init(72,20000);//辅助串口2接收,超时时间为20ms
USART_X_Init(USART2,36,115200); //接GPS模块
TIM3_Init(72,20000);//辅助串口3接收,超时时间为20ms
USART_X_Init(USART3,36,115200); //接GSM模块
printf("UART1 OK.....\n");
while(1)
{
//接收GPRS模块的返回值
if(USART3_RX_FLAG)
{
USART3_RX_BUFF[USART3_RX_CNT]='\0';
//printf("buff=%s,cnt=%d\n\n",USART3_RX_BUFF,USART3_RX_CNT);
printf("%s",USART3_RX_BUFF);
USART3_RX_CNT=0;
USART3_RX_FLAG=0;
memset(USART3_RX_BUFF,0,sizeof(USART3_RX_BUFF));
}
//接收GPS模块的返回值
if(USART2_RX_FLAG)
{
USART2_RX_BUFF[USART2_RX_CNT]='\0';
//printf("USART2_RX_BUFF=%s",USART2_RX_BUFF);
//解析GPS数据,得到经纬度
if(GPS_GNRMC_Decoding((char*)USART2_RX_BUFF,&Longitude,&latitude))
{
printf("GPS定位失败! 请到空旷地方定位\r\n");
}
else //定位成功
{
if(time_cnt>=8000) //8秒一次
{
data_tx_len=71;
sprintf(temp_buff,"%lf",Longitude);
data_tx_len+=strlen(temp_buff);
sprintf(temp_buff,"%lf",latitude);
data_tx_len+=strlen(temp_buff); //得到发送的数据长度
snprintf(onenet_http_cmd,sizeof(onenet_http_cmd),
"POST /devices/517704007/datapoints HTTP/1.1\r\n"\
"api-key:vvQAUiBG=HwKzqGicH=RxBvFCDw=\r\n"\
"Host:api.heclouds.com\r\n"\
"Connection:close\r\n"\
"Content-Length:%d\r\n"\
"\r\n"\
"{\"datastreams\":[{\"id\":\"gps\",\"datapoints\":[{\"value\":{\"lon\":%lf,\"lat\":%lf}}]}]}",
data_tx_len,Longitude,latitude
);
printf("data_tx_len=%d\r\n",data_tx_len);
printf("经度:%lf,纬度:%lf\r\n",Longitude,latitude);
time_cnt=0;
LED0=!LED0;
LED1=!LED1;
/*1. 检查GSM工作状态*/
state=GA6_GSM_StateCheck();
printf("GA6_GSM_StateCheck=%d\n",state);
if(!state)
{
/*2. 连接服务器*/
state=GA6_GSM_ConnectServer("183.230.40.33",80);
printf("GA6_GSM_ConnectServer=%d\n",state);
if(!state)
{
/*3. 向服务器发送数据*/
state=GA6_GSM_SendDataToServer((u8*)onenet_http_cmd,strlen((char*)onenet_http_cmd));
printf("GA6_GSM_SendDataToServer=%d\n",state);
}
else
{
//手动断开服务器连接
printf("断开服务器连接:%d\r\n",GA6_GSM_SendCmd("AT+CIPCLOSE\r\n","OK",5000));
}
}
}
}
USART2_RX_CNT=0;
USART2_RX_FLAG=0;
memset(USART2_RX_BUFF,0,sizeof(USART2_RX_BUFF));
}
time_cnt++;
delay_ms(1);
}
}
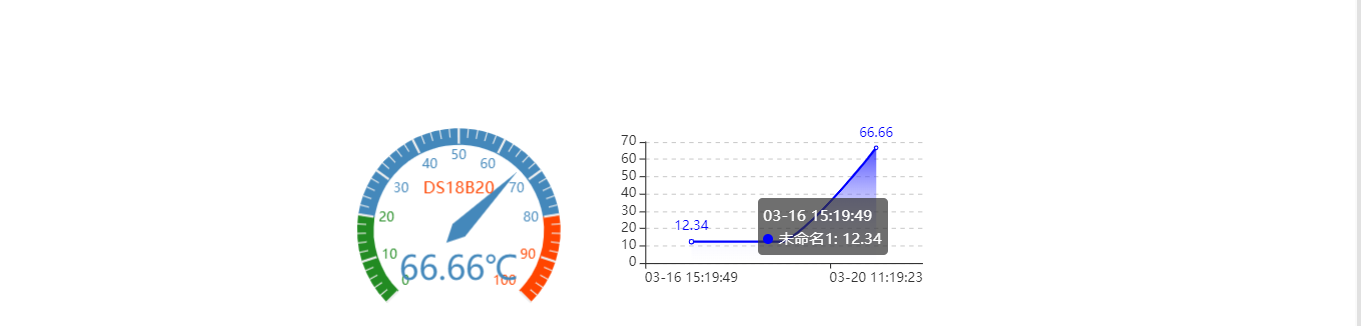
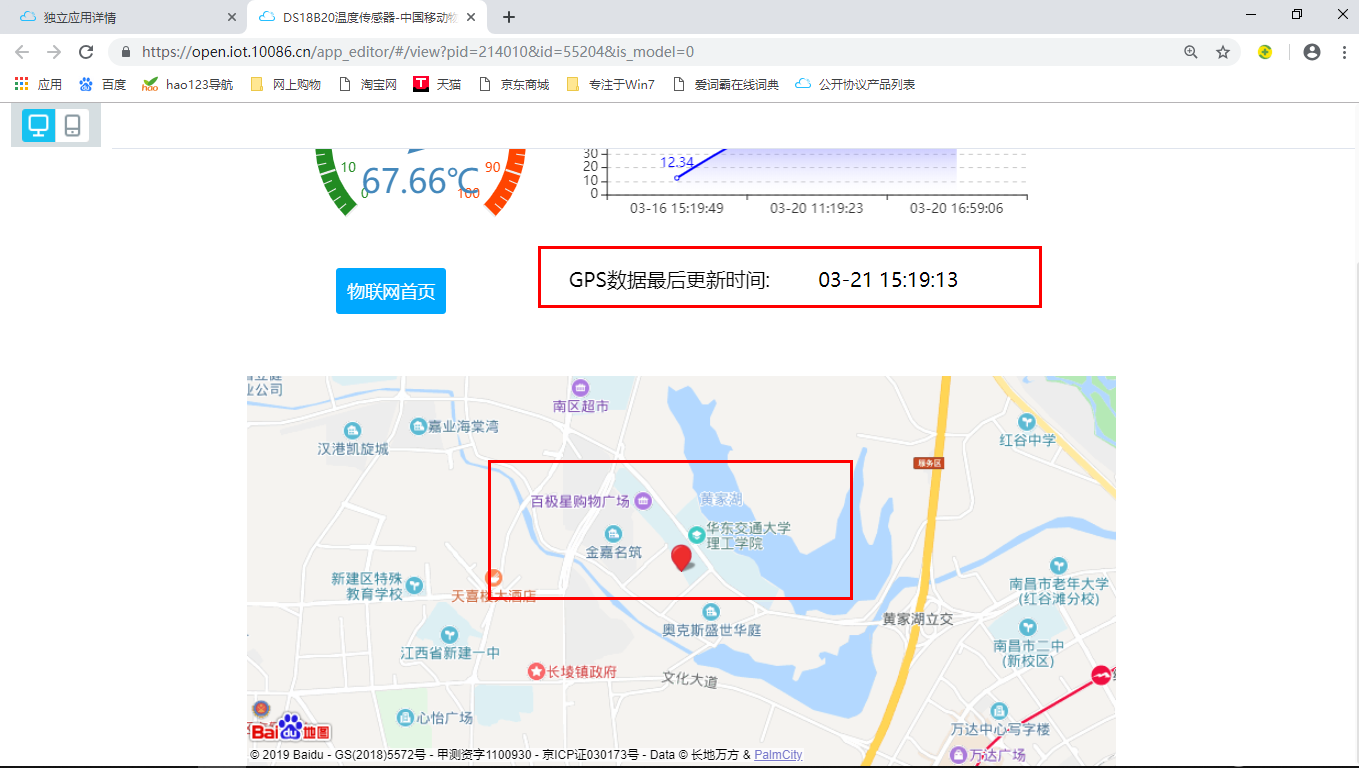
- 网页上显示的效果:


完整源码下载: https://download.csdn.net/download/xiaolong1126626497/18245590
审核编辑:符乾江
-
GPS卫星定位儿童手机 随时随地找到孩子2012-07-21 4290
-
【FireBLE申请】基于BLE的儿童防丢器设计2015-07-08 2451
-
为什么目前智能手环市场几乎都是针对年轻或中年人群体?2016-11-11 6317
-
使用GPS定位器,再也不用担心老人、小孩会走丢2017-11-01 4012
-
儿童智能防丢器设计方案2018-11-12 1790
-
GPS模块在智能定位鞋产品中的应用是什么2020-08-20 1443
-
防丢车新利器GPS Snitch个人跟踪设备2009-12-01 1292
-
采用GPS/GSM技术的防丢失个人定位系统设计2010-07-03 1531
-
老人GPS定位监护系统相关技术与功能介绍2017-10-18 1404
-
如何使用GPS和GSM进行儿童防走失的单片机定位系统设计2019-03-25 1760
-
GPS定位器、智能手环…总有一款神器能帮老人回家2020-12-25 2534
-
车载GPS定位跟踪器选型技巧2023-03-21 2514
-
基于STM32的GPS定位仪2024-05-07 2158
全部0条评论

快来发表一下你的评论吧 !
