

 电机控制进阶3——PID串级控制
电机控制进阶3——PID串级控制
描述
前两篇文章:
https://www.elecfans.com/d/1796839.html
https://www.elecfans.com/d/1798370.html
分别介绍了PID速度控制和PID位置控制,分别用来控制电机以期望的速度持续转动以及以期望的位置(圈数)转动,这里的期望值都只有一个,但是,如果想要以期望的速度转动到期望的位置(启动与停止的加减速过程不考虑),该怎么控制呢?那就要将两者结合起来了,即PID的串级控制来控制电机。
串级PID结构图
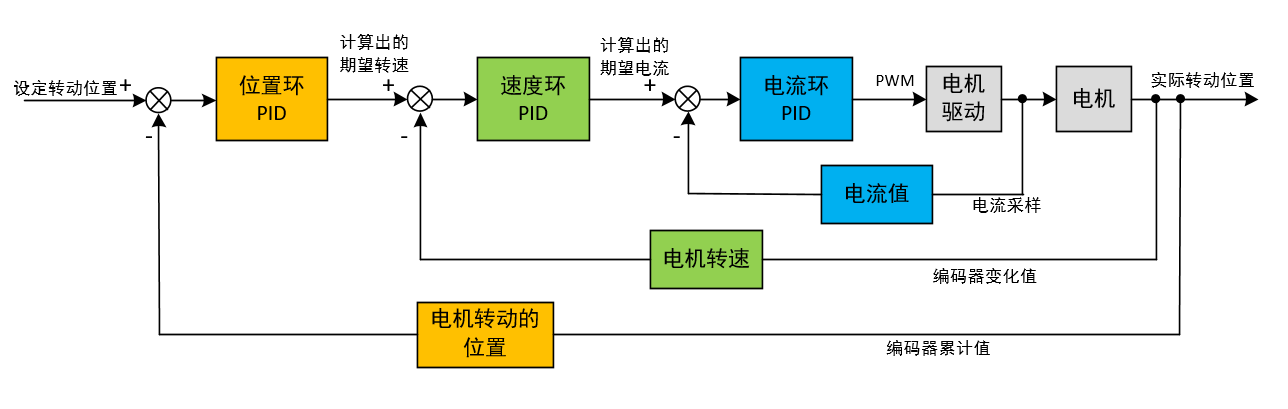
PID串级控制的典型结构为位置环+速度环+电流环,如下图。
PID串级控制中,最外环是输入是整个控制系统的期望值,外环PID的输出值是内环PID的期望值。
能够使用三环控制的前提是要硬件支持,比如位置环和速度环需要实时的电机转动位置和转动速度作为反馈,这就需要电机需要配有编码器用于测速与测量转动的位置;电流环需要有电流采样电路来实时获取电机的电流作为反馈。
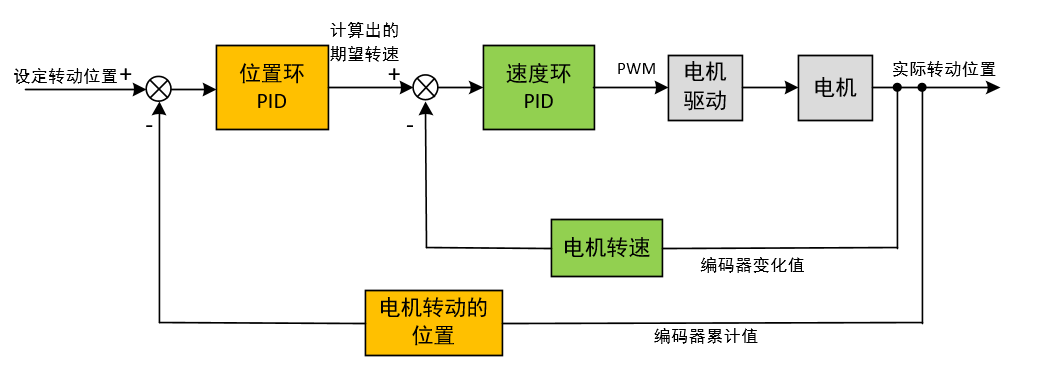
如果没有电流采样电路,可以将电流环去掉,只使用位置环+速度环,系统的期望仍是转动的位置,内环可以调节转动的速度。
另外,如果只是想控制电机转速实现电机调速,可以使用速度环+电流环,系统的期望仍是转动的位置,内环可以调节电机的电流,增强系统转动调节的抗干扰能力。

位置环+速度环实践
由于我的电机没有电流测量电路,所以,本文以位置环+速度环来学习PID串级控制。就是按照下面这个图:
PID参数定义
由于是串级PID控制,每一级的PID都要有自己的参数,本次实验使用位置PID+速度PID,参数定义如下:
/*定义位置PID与速度PID结构体型的全局变量*/
PID pid_location;
PID pid_speed;
/**
* @brief PID参数初始化
* @note 无
* @retval 无
*/
void PID_param_init()
{
/* 位置相关初始化参数 */
pid_location.target_val = TOTAL_RESOLUTION*10;
pid_location.output_val = 0.0;
pid_location.err = 0.0;
pid_location.err_last = 0.0;
pid_location.integral = 0.0;
pid_location.Kp = 0.05;
pid_location.Ki = 0;
pid_location.Kd = 0;
/* 速度相关初始化参数 */
pid_speed.target_val=10.0;
pid_speed.output_val=0.0;
pid_speed.err=0.0;
pid_speed.err_last=0.0;
pid_speed.integral=0.0;
pid_speed.Kp = 80.0;
pid_speed.Ki = 2.0;
pid_speed.Kd = 100.0;
}
位置PID的实现
这里有两点需要注意:
闭环死区的设定
闭环死区是指执行机构的最小控制量,无法再通过调节来满足控制精度,如果仍然持续调节,系统则会在目标值前后频繁动作,不能稳定下来。
比如某个系统的控制精度是1,但目标值需要是1.5,则无论怎么调节,最终的结果只能控制在 1或 2,始终无法达到预设值。这 1.5L小数点后的范围,就是闭环死区,系统是无法控制的,误差会一直存在,容易发生震荡现象。
对应精度要求不高的系统,可以设定闭环死区,比如将允许的误差范围设为0.5,则最终结果在 1或 2都认为是没有误差,这时将目标值 与实际值之差强制设为 0,认为没有误差,即限定了闭环死区。
积分分离的设定
通过积分分离的方式来实现抗积分饱和,积分饱和是指执行机构达到极限输出能力了,仍无法到达目标值,在很长一段时间内无法消除静差造成的。
例如,PWM输出到了100%,仍达不到期望位置,此时若一直进行误差累加,在一段时间后, PID 的积分项累计了很大的数值,如果这时候到达了目标值或者重新设定了目标值,由于积分由于累计的误差很大,系统并不能立即调整到目标值,可能造成超调或失调的现象。
解决积分饱和的一种方法是使用积分分离,该方法是在累计误差小于某个阈值才使用积分项,累计误差过大则不再继续累计误差,相当于只使用了PD控制器。
控制流程图
带有闭环死区与积分分离的PID控制流程如下图:

完整的位置PID代码如下:
/**
* @brief 位置PID算法实现
* @param actual_val:实际值
* @note 无
* @retval 通过PID计算后的输出
*/
#define LOC_DEAD_ZONE 60 /*位置环死区*/
#define LOC_INTEGRAL_START_ERR 200 /*积分分离时对应的误差范围*/
#define LOC_INTEGRAL_MAX_VAL 800 /*积分范围限定,防止积分饱和*/
float location_pid_realize(PID *pid, float actual_val)
{
/*计算目标值与实际值的误差*/
pid->err = pid->target_val - actual_val;
/* 设定闭环死区 */
if((pid->err >= -LOC_DEAD_ZONE) && (pid->err <= LOC_DEAD_ZONE))
{
pid->err = 0;
pid->integral = 0;
pid->err_last = 0;
}
/*积分项,积分分离,偏差较大时去掉积分作用*/
if(pid->err > -LOC_INTEGRAL_START_ERR && pid->err < LOC_INTEGRAL_START_ERR)
{
pid->integral += pid->err;
/*积分范围限定,防止积分饱和*/
if(pid->integral > LOC_INTEGRAL_MAX_VAL)
{
pid->integral = LOC_INTEGRAL_MAX_VAL;
}
else if(pid->integral < -LOC_INTEGRAL_MAX_VAL)
{
pid->integral = -LOC_INTEGRAL_MAX_VAL;
}
}
/*PID算法实现*/
pid->output_val = pid->Kp * pid->err +
pid->Ki * pid->integral +
pid->Kd * (pid->err - pid->err_last);
/*误差传递*/
pid->err_last = pid->err;
/*返回当前实际值*/
return pid->output_val;
}
串级控制代码
//周期定时器的回调函数
void AutoReloadCallback()
{
static uint32_t location_timer = 0; // 位置环周期
static __IO int encoderNow = 0; /*当前时刻总计数值*/
static __IO int encoderLast = 0; /*上一时刻总计数值*/
int encoderDelta = 0; /*当前时刻与上一时刻编码器的变化量*/
float actual_speed = 0; /*实际测得速度*/
int actual_speed_int = 0;
int res_pwm = 0;/*PID计算得到的PWM值*/
static int i=0;
/*【1】读取编码器的值*/
encoderNow = read_encoder() + EncoderOverflowCnt*ENCODER_TIM_PERIOD;/*获取当前的累计值*/
encoderDelta = encoderNow - encoderLast; /*得到变化值*/
encoderLast = encoderNow;/*更新上次的累计值*/
/*【2】位置PID运算,得到PWM控制值*/
if ((location_timer++ % 2) == 0)
{
float control_val = 0; /*当前控制值*/
/*位置PID计算*/
control_val = location_pid_realize(&pid_location, encoderNow);
/*目标速度值限制*/
speed_val_protect(&control_val);
/*设定速度PID的目标值*/
set_pid_target(&pid_speed, control_val);
}
/* 转速(1秒钟转多少圈)=单位时间内的计数值/总分辨率*时间系数, 再乘60变为1分钟转多少圈 */
actual_speed = (float)encoderDelta / TOTAL_RESOLUTION * 10 * 60;
/*【3】速度PID运算,得到PWM控制值*/
actual_speed_int = actual_speed;
res_pwm = pwm_val_protect((int)speed_pid_realize(&pid_speed, actual_speed));
/*【4】PWM控制电机*/
set_motor_rotate(res_pwm);
/*【5】数据上传到上位机显示*/
set_computer_value(SEND_FACT_CMD, CURVES_CH1, &encoderNow, 1); /*给通道1发送实际的电机【位置】值*/
}
PID的计算是通过定时器调用,每10ms一次,从代码中可以看到,内环(速度PID)控制的周期要比外环(位置PID)的周期短,位置PID是每两次循环计算一次,因为内环控制着最终的输出,这个输出对应的就是实际场景中的控制量 (本实验最终控制的是位置),位置是无法突变,是需要时间积累的,所以内环输出尽可能快些。
视频演示
视频中,测试以不同的目标速度到达目标位置,视频后半段测试引入干扰情况下的控制效果:
https://www.bilibili.com/video/BV1QK4y1g7yg?spm_id_from=333.999.0.0
开源代码

-
PID串级控制在同步发电机励磁控制中的应用2025-06-16 305
-
串级控制pid参数怎么调节2024-08-23 7555
-
电机控制进阶2——PID位置控制2023-05-06 1017
-
【创作者之星.No3】电机控制原理与电路设计知识汇总2022-04-08 10277
-
电机控制进阶1——PID速度控制2022-02-24 28721
-
PID的串级控制来控制电机2022-01-10 2727
-
如何用PID的串级控制来控制电机?2021-12-21 1636
-
基于大疆RM3508电机的串级PID相关资料推荐2021-06-30 2019
-
电机控制进阶2之PID位置控制 相关资料推荐2021-06-29 1817
-
什么是串级PID? 简单PID和串级PID的优劣对比2021-02-26 22208
-
一文详解PID串级控制?2020-10-22 3002
-
压控大功率电流源的串级PID控制算法设计2018-02-10 5485
-
串级PID控制原理2010-04-28 16049
-
基于串级PID控制技术的堆垛机控制器的设计2009-08-29 814
全部0条评论

快来发表一下你的评论吧 !
