

 STM32:SPI总线、W25Q64(FLASH)的详细介绍
STM32:SPI总线、W25Q64(FLASH)的详细介绍
电子说
描述
一、环境介绍
编程软件: keil5
操作系统: win10
MCU型号: STM32F103ZET6
STM32编程方式: 寄存器开发 (方便程序移植到其他单片机)
SPI总线: STM32本身支持SPI硬件时序,本文示例代码里同时采用模拟时序和硬件时序两种方式读写W25Q64。
模拟时序更加方便移植到其他单片机,更加方便学习理解SPI时序,通用性更高,不分MCU;
硬件时序效率更高,每个MCU配置方法不同,依赖MCU硬件本身支持。
存储器件: 采用华邦W25Q64 flash存储芯片。
W25Q64这类似的Flash存储芯片在单片机里、嵌入式系统里还是比较常见,可以用来存储图片数据、字库数据、音频数据、保存设备运行日志文件等。
二、华邦W25Q64介绍(FLASH存储类型)
2.1 W25Q64芯片功能介绍

W25Q64是为系统提供一个最小空间、最少引脚,最低功耗的串行Flash存储器,25Q系列比普通的串行Flash存储器更灵活,性能更优越。
W25Q64支持双倍/四倍的SPI,可以储存包括声音、文本、图片和其他数据;芯片支持的工作电压 2.7V 到 3.6V,正常工作时电流小于5mA,掉电时低于1uA,所有芯片提供标准的封装。
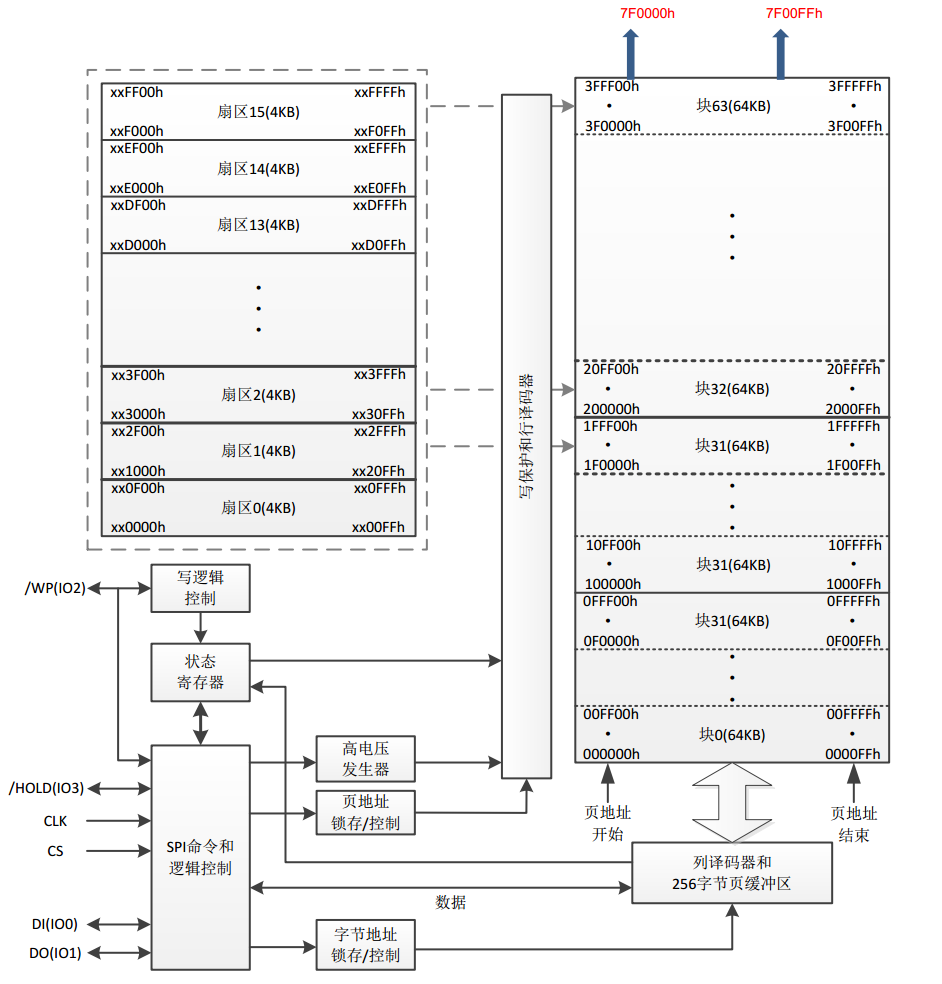
W25Q64的内存空间结构: 一页256字节,4K(4096 字节)为一个扇区,16个扇区为1块,容量为8M字节,共有128个块,2048 个扇区。
W25Q64每页大小由256字节组成,每页的256字节用一次页编程指令即可完成。
擦除指令分别支持: 16页(1个扇区)、128页、256页、全片擦除。
W25Q64支持标准串行外围接口(SPI),和高速的双倍/四倍输出,双倍/四倍用的引脚:串行时钟、片选端、串行数据 I/O0(DI)、I/O1(DO)、I/O2(WP)和 I/O3(HOLD)。
SPI 最高支持 80MHz,当用快读双倍/四倍指令时,相当于双倍输出时最高速率160MHz,四倍输出时最高速率 320MHz。这个传输速率比得上8位和16位的并行Flash存储器。
W25Q64支持 JEDEC 标准,具有唯一的 64 位识别序列号,方便区别芯片型号。
2.2 W25Q64芯片特性详细介绍
●SPI串行存储器系列
-W25Q64:64M 位/8M 字节
-W25Q16:16M 位/2M 字节
-W25Q32:32M 位/4M 字节
-每 256 字节可编程页
●灵活的4KB扇区结构
-统一的扇区擦除(4K 字节)
-块擦除(32K 和 64K 字节)
-一次编程 256 字节
-至少 100,000 写/擦除周期
-数据保存 20 年
●标准、双倍和四倍SPI
-标准 SPI:CLK、CS、DI、DO、WP、HOLD
-双倍 SPI:CLK、CS、IO0、IO1、WP、HOLD
-四倍 SPI:CLK、CS、IO0、IO1、IO2、IO3
●高级的安全特点
-软件和硬件写保护
-选择扇区和块保护
-一次性编程保护(1)
-每个设备具有唯一的64位ID(1)
●高性能串行Flash存储器
-比普通串行Flash性能高6倍
-80MHz时钟频率
-双倍SPI相当于160MHz
-四倍SPI相当于320MHz
-40MB/S连续传输数据
-30MB/S随机存取(每32字节)
-比得上16位并行存储器
●低功耗、宽温度范围
-单电源 2.7V-3.6V
-工作电流 4mA,掉电<1μA(典型值)
-40℃~+85℃工作
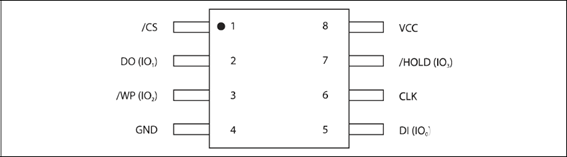
2.3 引脚介绍
下面只介绍W25Q64标准SPI接口,因为目前开发板上的封装使用的就是标准SPI接口。
|
引脚编号 |
引脚名称 |
I/O |
功能 |
|
1 |
/CS |
I |
片选端输入 |
|
2 |
DO(IO1) |
I/O |
数据输出(数据输入输出 1)*1 |
|
3 |
/WP(IO2) |
I/O |
写保护输入(数据输入输出 2)*2 |
|
4 |
GND |
|
地 |
|
5 |
DI(IO0) |
I/O |
数据输入(数据输入输出 0)*1 |
|
6 |
CLK |
I |
串行时钟输入 |
|
7 |
/HOLD(IO3) |
I/O |
保持端输入(数据输入输出 3)*2 |
|
8 |
VCC |
|
电源 |
2.2.1 SPI片选(/CS)引脚用于使能和禁止芯片操作
CS引脚是W25Q64的片选引脚,用于选中芯片;当CS为高电平时,芯片未被选择,串行数据输出(DO、IO0、IO1、IO2 和 IO3)引脚为高阻态。未被选择时,芯片处于待机状态下的低功耗,除非芯片内部在擦除、编程。当/CS 变成低电平,芯片功耗将增长到正常工作,能够从芯片读写数据。上电后, 在接收新的指令前,/CS 必须由高变为低电平。上电后,/CS 必须上升到 VCC,在/CS 接上拉电阻可以完成这个操作。
2.2.2 串行数据输入、输出和 IOs(DI、DO 和 IO0、IO1、IO2、IO3)
W25Q64、W25Q16 和 W25Q32 支持标准 SPI、双倍 SPI 和四倍 SPI。
标准的 SPI 传输用单向的 DI(输入)引脚连续的写命令、地址或者数据在串行时钟(CLK)的上升沿时写入到芯片内。
标准的SPI 用单向的 DO(输出)在 CLK 的下降沿从芯片内读出数据或状态。
2.2.3 写保护(/WP)
写保护引脚(/WP)用来保护状态寄存器。和状态寄存器的块保护位(SEC、TB、BP2、BP1 和BP0)和状态寄存器保护位(SRP)对存储器进行一部分或者全部的硬件保护。/WP 引脚低电平有效。当状态寄存器 2 的 QE 位被置位了,/WP 引脚(硬件写保护)的功能不可用。
2.2.4 保持端(/HOLD)
当/HOLD 引脚是有效时,允许芯片暂停工作。在/CS 为低电平时,当/HOLD 变为低电平,DO 引脚将变为高阻态,在 DI 和 CLK 引脚上的信号将无效。当/HOLD 变为高电平,芯片恢复工作。/HOLD 功能用在当有多个设备共享同一 SPI 总线时。/HOLD 引脚低电平有效。当状态寄存器 2 的 QE 位被置位了,/ HOLD 引脚的功能不可用。
2.2.5 串行时钟(CLK)
串行时钟输入引脚为串行输入和输出操作提供时序。(见 SPI 操作)。
设备数据传输是从高位开始,数据传输的格式为 8bit,数据采样从第二个时间边沿开始,空闲状态时,时钟线 clk 为高电平。
2.3 内部结构框架图
2.4 W25Q64的标准SPI操作流程
W25Q64标准SPI总线接口包含四个信号: 串行时钟(CLK)、片选端(/CS)、串行数据输入(DI)和串行数据输出(DO)。
DI输入引脚在CLK的上升沿连续写命令、地址或数据到芯片内。
DO输出引脚在CLK的下降沿从芯片内读出数据或状态。
W25Q64分别支持SPI总线工作模式0和工作模式3。模式0和模式3的主要区别在于常态时的CLK信号不同;对于模式0来说,当SPI主机已准备好数据还没传输到串行Flash中时,CLK信号常态为低;
设备数据传输是从高位开始,数据传输的格式为8bit,数据采样从第二个时间边沿开始,空闲状态时,时钟线clk为高电平。
2.5 部分控制和状态寄存器介绍
2.5.1 W25Q64的指令表
|
指令名称 |
字节 1 (代码) |
字节 2 |
字节 3 |
字节 4 |
字节 5 |
字节 6 |
|
写使能 |
06h |
write_enabled |
||||
|
禁止写 |
04h |
|
||||
|
读状态寄存器 1 |
05h |
(S7-S0)(2) |
|
|||
|
读状态寄存器 2 |
35h |
(S15-S8)(2) |
|
|||
|
写状态寄存器 |
01h |
(S7-S0) |
(S15-S8) |
|
||
|
页编程 |
02h |
A23-A16 |
A15-A8 |
A7-A0 |
(D7-D0) |
|
|
四倍页编程 |
32h |
A23-A16 |
A15-A8 |
A7-A0 |
(D7-D0,…)(3) |
|
|
块擦除(64KB) |
D8h |
A23-A16 |
A15-A8 |
A7-A0 |
|
|
|
块擦除(32KB) |
52h |
A23-A16 |
A15-A8 |
A7-A0 |
|
|
|
扇区擦除(4KB) |
20h |
A23-A16 |
A15-A8 |
A7-A0 |
|
|
|
全片擦除 |
C7h/60h |
|
||||
|
暂停擦除 |
75h |
|
||||
|
恢复擦除 |
7Ah |
|
||||
|
掉电模式 |
B9h |
|
||||
|
高性能模式 |
A3h |
|
|
|
|
|
2.5.2 读状态寄存器1
状态寄存器1的内部结构如下:
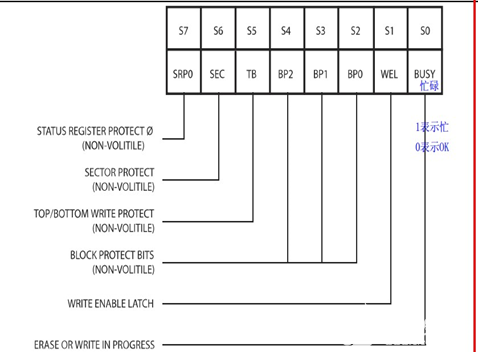
状态寄存器1的S0位是当前W25Q64的忙状态;为1的时候表示设备正在执行程序(可能是在擦除芯片)或写状态寄存器指令,这个时候设备将忽略传来的指令, 除了读状态寄存器和擦除暂停指令外,其他写指令或写状态指令都无效, 当 S0 为 0 状态时指示设备已经执行完毕,可以进行下一步操作。
读状态寄存器1的时序如下:
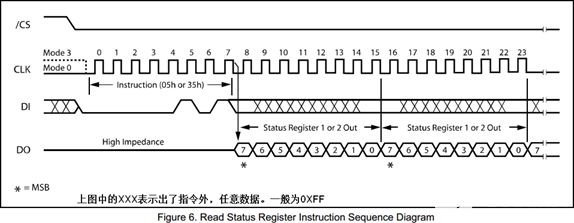
读取状态寄存器的指令是 8 位的指令。发送指令之前,先将/CS 拉低,再发送指令码“05 h” 或者“35h”。设备收到读取状态寄存器的指令后,将状态信息(高位)依次移位发送出去,读出的状态信息,最低位为 1 代表忙,最低位为 0 代表可以操作,状态信息读取完毕,将片选线拉高。
读状态寄存器指令可以使用在任何时候,即使程序在擦除的过程中或者写状态寄存器周期正在进行中。这可以检测忙碌状态来确定周期是否完成,以确定设备是否可以接受另一个指令。
2.5.3 读制造商ID和芯片ID
时序图如下:
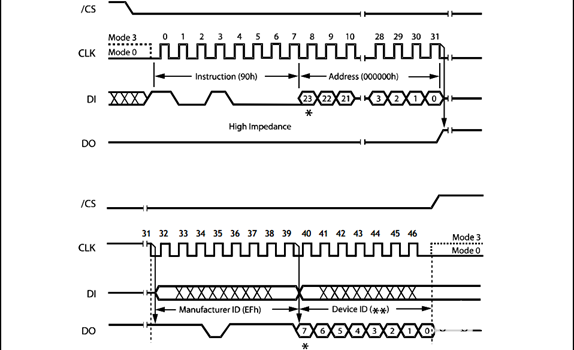
读取制造商/设备 ID 指令可以读取制造商 ID 和特定的设备 ID。读取之前,拉低 CS 片选信号,接着发送指令代码“90h” ,紧随其后的是一个 24 位地址(A23-A0)000000h。 设备收到指令之后,会发出华邦电子制造商 ID(EFh) 和设备ID(w25q64 为 16h)。如果 24 位地址设置为 000001h ,设备 ID 会先发出,然后跟着制造商 ID。制造商和设备ID可以连续读取。完成指令后,片选信号/ CS 拉高。
2.5.4 全片擦除(C7h/60h)
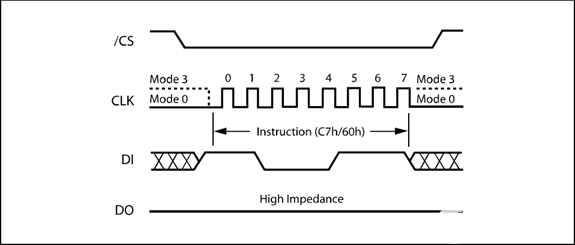
全芯片擦除指令,可以将整个芯片的所有内存数据擦除,恢复到 0XFF 状态。写入全芯片擦除指令之前必须执行设备写使能(发送设备写使能指令 0x06),并判断状态寄存器(状态寄存器位最低位必须等于 0 才能操作)。发送全芯片擦除指令前,先拉低/ CS,接着发送擦除指令码”C7h”或者是”60h”, 指令码发送完毕后,拉高片选线 CS/,,并判断状态位,等待擦除结束。全片擦除指令尽量少用,擦除会缩短设备的寿命。
2.5.5 读数据(03h)
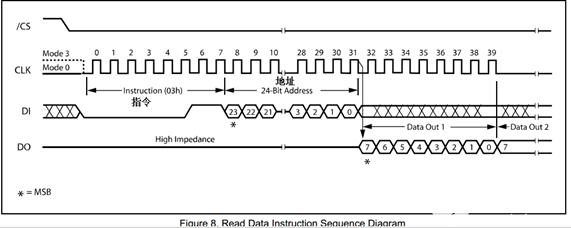
读取数据指令允许按顺序读取一个字节的内存数据。当片选 CS/拉低之后,紧随其后是一个 24 位的地址(A23-A0)(需要发送 3 次,每次 8 个字节,先发高位)。芯片收到地址后,将要读的数据按字节大小转移出去,数据是先转移高位,对于单片机,时钟下降沿发送数据,上升沿接收数据。读数据时,地址会自动增加,允许连续的读取数据。这意味着读取整个内存的数据,只要用一个指令就可以读完。数据读取完成之后,片选信号/ CS 拉高。
读取数据的指令序列,如上图所示。如果一个读数据指令而发出的时候,设备正在擦除扇区,或者(忙= 1),该读指令将被忽略,也不会对当前周期有什么影响。
三、SPI时序介绍
SPI是串行外设接口(Serial Peripheral Interface)的缩写,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间。
SPI是一种高速、高效率的串行接口技术,一共有4根线。通常由一个主模块和一个或多个从模块组成,主模块选择一个从模块进行同步通信,从而完成数据的交换。SPI是一个环形结构,通信时需要至少4根线(在单向传输时3根线也可以)。分别是MISO(主设备数据输入)、MOSI(主设备数据输出)、SCLK(时钟)、CS(片选)。
(1)MISO– Master Input Slave Output,主设备数据输入,从设备数据输出;
(2)MOSI– Master Output Slave Input,主设备数据输出,从设备数据输入;
(3)SCLK – Serial Clock,时钟信号,由主设备产生;
(4)CS – Chip Select,从设备使能信号,由主设备控制。
其中,CS是从芯片是否被主芯片选中的控制信号,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),主芯片对此从芯片的操作才有效。这就使在同一条总线上连接多个SPI设备成为可能。接下来就负责通讯的3根线了。通讯是通过数据交换完成的,这里先要知道SPI是串行通讯协议,也就是说数据是一位一位的传输的。这就是SCLK时钟线存在的原因,由SCLK提供时钟脉冲,SDI,SDO则基于此脉冲完成数据传输。数据输出通过 SDO线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。完成一位数据传输,输入也使用同样原理。因此,至少需要8次时钟信号的改变(上沿和下沿为一次),才能完成8位数据的传输。
时钟信号线SCLK只能由主设备控制,从设备不能控制。这样的传输方式有一个优点,在数据位的传输过程中可以暂停,也就是时钟的周期可以为不等宽,因为时钟线由主设备控制,当没有时钟跳变时,从设备不采集或传送数据。SPI还是一个数据交换协议:因为SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出。芯片集成的SPI串行同步时钟极性和相位可以通过寄存器配置,IO模拟的SPI串行同步时钟需要根据从设备支持的时钟极性和相位来通讯。SPI通信原理比I2C要简单,IIC有应答机制,可以确保数据都全部发送成。SPI接口没有指定的流控制,没有应答机制确认是否接收到数据,速度上更加快。
SPI总线通过时钟极性和相位可以配置成4种时序:
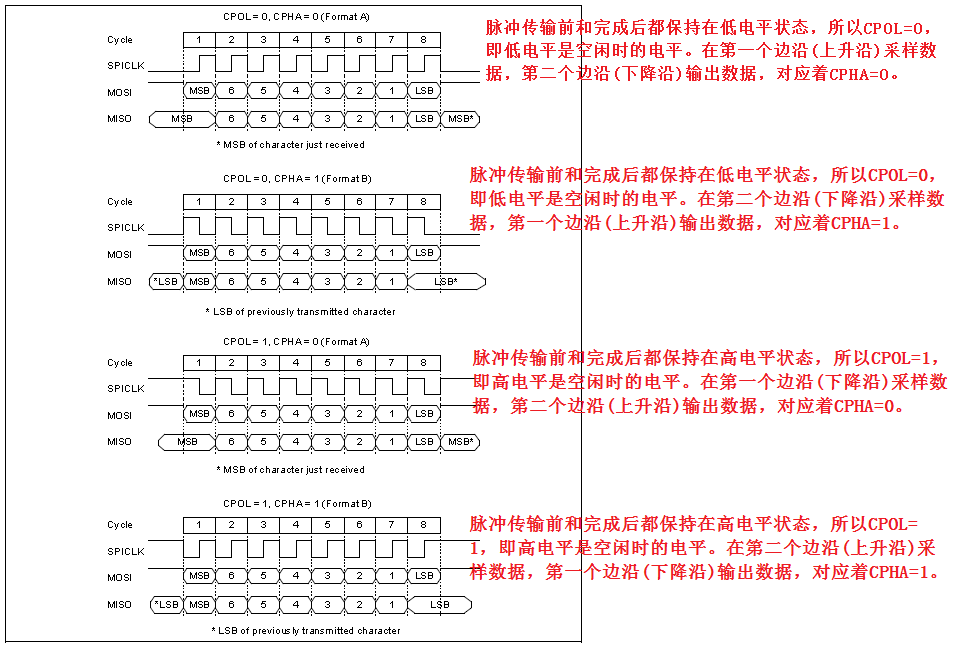
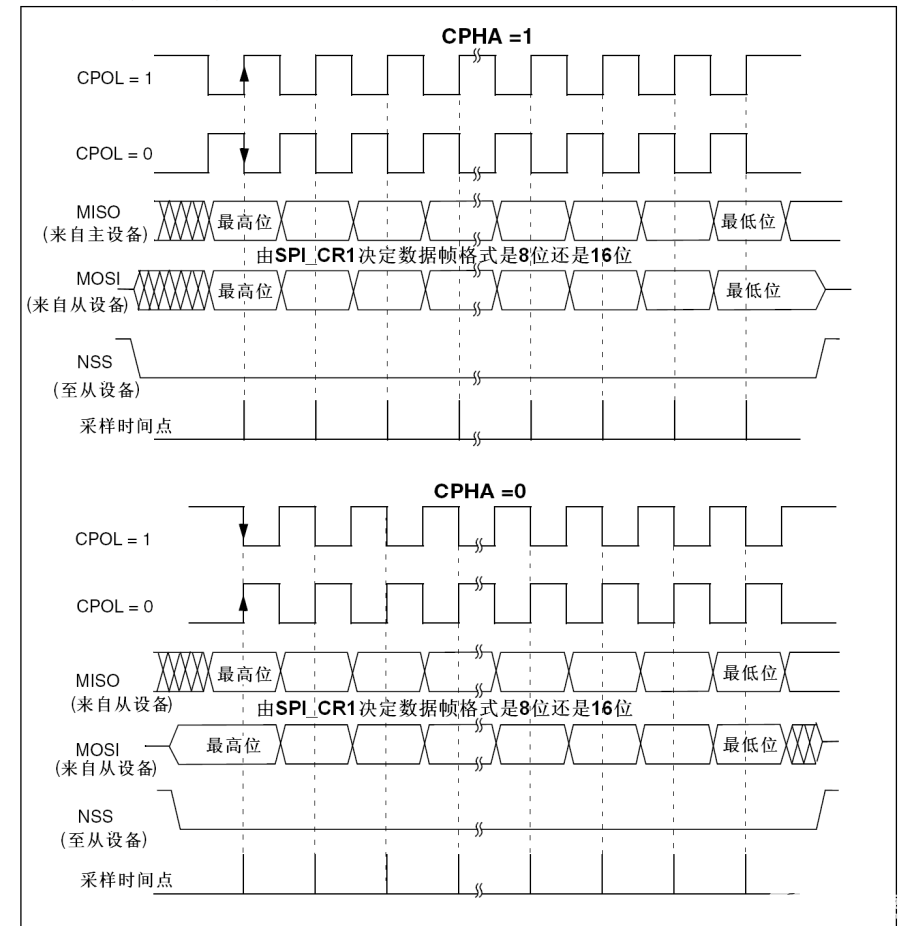
STM32F103参考手册,SPI章节介绍的时序图:
SPI时序比较简单,CPU如果没有硬件支持,可以直接写代码采用IO口模拟,下面是模拟时序的示例的代码:
完整工程代码下载:https://download.csdn.net/download/xiaolong1126626497/19425042
SPI的模式1:
u8 SPI_ReadWriteOneByte(u8 tx_data)
{
u8 i,rx_data=0;
SCK=0; //空闲电平(默认初始化情况)
for(i=0;i<8;i++)
{
/*1. 主机发送一位数据*/
SCK=0;//告诉从机,主机将要发送数据
if(tx_data&0x80)MOSI=1; //发送数据
else MOSI=0;
SCK=1; //告诉从机,主机数据发送完毕
tx_data<<=1; //继续发送下一位
/*2. 主机接收一位数据*/
rx_data<<=1; //默认认为接收到0
if(MISO)rx_data|=0x01;
}
SCK=0; //恢复空闲电平
return rx_data;
}
SPI的模式2:
u8 SPI_ReadWriteOneByte(u8 tx_data)
{
u8 i,rx_data=0;
SCK=0; //空闲电平(默认初始化情况)
for(i=0;i<8;i++)
{
/*1. 主机发送一位数据*/
SCK=1;//告诉从机,主机将要发送数据
if(tx_data&0x80)MOSI=1; //发送数据
else MOSI=0;
SCK=0; //告诉从机,主机数据发送完毕
tx_data<<=1; //继续发送下一位
/*2. 主机接收一位数据*/
rx_data<<=1; //默认认为接收到0
if(MISO)rx_data|=0x01;
}
SCK=0; //恢复空闲电平
return rx_data;
}
SPI的模式3:
u8 SPI_ReadWriteOneByte(u8 tx_data)
{
u8 i,rx_data=0;
SCK=1; //空闲电平(默认初始化情况)
for(i=0;i<8;i++)
{
/*1. 主机发送一位数据*/
SCK=1;//告诉从机,主机将要发送数据
if(tx_data&0x80)MOSI=1; //发送数据
else MOSI=0;
SCK=0; //告诉从机,主机数据发送完毕
tx_data<<=1; //继续发送下一位
/*2. 主机接收一位数据*/
rx_data<<=1; //默认认为接收到0
if(MISO)rx_data|=0x01;
}
SCK=1; //恢复空闲电平
return rx_data;
}
SPI的模式4:
u8 SPI_ReadWriteOneByte(u8 tx_data)
{
u8 i,rx_data=0;
SCK=1; //空闲电平(默认初始化情况)
for(i=0;i<8;i++)
{
/*1. 主机发送一位数据*/
SCK=0;//告诉从机,主机将要发送数据
if(tx_data&0x80)MOSI=1; //发送数据
else MOSI=0;
SCK=1; //告诉从机,主机数据发送完毕
tx_data<<=1; //继续发送下一位
/*2. 主机接收一位数据*/
rx_data<<=1; //默认认为接收到0
if(MISO)rx_data|=0x01;
}
SCK=1; //恢复空闲电平
return rx_data;
}
四、W25Q64的示例代码
4.1 STM32采用硬件SPI读写W25Q64示例代码
/*
函数功能:SPI初始化(模拟SPI)
硬件连接:
MISO--->PB14
MOSI--->PB15
SCLK--->PB13
*/
void SPI_Init(void)
{
/*开启时钟*/
RCC->APB1ENR|=1<<14; //开启SPI2时钟
RCC->APB2ENR|=1<<3; //PB
GPIOB->CRH&=0X000FFFFF; //清除寄存器
GPIOB->CRH|=0XB8B00000;
GPIOB->ODR|=0X7<<13; //PB13/14/15上拉--输出高电平
/*SPI2基本配置*/
SPI2->CR1=0X0; //清空寄存器
SPI2->CR1|=0<<15; //选择“双线双向”模式
SPI2->CR1|=0<<11; //使用8位数据帧格式进行发送/接收;
SPI2->CR1|=0<<10; //全双工(发送和接收);
SPI2->CR1|=1<<9; //启用软件从设备管理
SPI2->CR1|=1<<8; //NSS
SPI2->CR1|=0<<7; //帧格式,先发送高位
SPI2->CR1|=0x0<<3;//当总线频率为36MHZ时,SPI速度为18MHZ,高速。
SPI2->CR1|=1<<2; //配置为主设备
SPI2->CR1|=1<<1; //空闲状态时, SCK保持高电平。
SPI2->CR1|=1<<0; //数据采样从第二个时钟边沿开始。
SPI2->CR1|=1<<6; //开启SPI设备。
}
/*
函数功能:SPI读写一个字节
*/
u8 SPI_ReadWriteOneByte(u8 data_tx)
{
u16 cnt=0;
while((SPI2->SR&1<<1)==0) //等待发送区空--等待发送缓冲为空
{
cnt++;
if(cnt>=65530)return 0; //超时退出 u16=2个字节
}
SPI2->DR=data_tx; //发送一个byte
cnt=0;
while((SPI2->SR&1<<0)==0) //等待接收完一个byte
{
cnt++;
if(cnt>=65530)return 0; //超时退出
}
return SPI2->DR; //返回收到的数据
}
/*
函数功能:W25Q64初始化
硬件连接:
MOSI--->PB15
MISO--->PB14
SCLK--->PB13
CS----->PB12
*/
void W25Q64_Init(void)
{
/*1. 开时钟*/
RCC->APB2ENR|=1<<3; //PB
/*2. 配置GPIO口模式*/
GPIOB->CRH&=0xFFF0FFFF;
GPIOB->CRH|=0x00030000;
W25Q64_CS=1; //未选中芯片
SPI_Init(); //SPI初始化
}
/*
函数功能:读取芯片的ID号
*/
u16 W25Q64_ReadID(void)
{
u16 id;
/*1. 拉低片选*/
W25Q64_CS=0;
/*2. 发送读取ID的指令*/
SPI_ReadWriteOneByte(0x90);
/*3. 发送24位的地址-0*/
SPI_ReadWriteOneByte(0);
SPI_ReadWriteOneByte(0);
SPI_ReadWriteOneByte(0);
/*4. 读取芯片的ID*/
id=SPI_ReadWriteOneByte(0xFF)<<8;
id|=SPI_ReadWriteOneByte(0xFF);
/*5. 拉高片选*/
W25Q64_CS=1;
return id;
}
/*
函数功能:检测W25Q64状态
*/
void W25Q64_CheckStat(void)
{
u8 stat=1;
while(stat&1<<0)
{
W25Q64_CS=0; //选中芯片
SPI_ReadWriteOneByte(0x05); //发送读状态寄存器1指令
stat=SPI_ReadWriteOneByte(0xFF); //读取状态
W25Q64_CS=1; //取消选中芯片
}
}
/*
函数功能:页编程
说 明:一页最多写256个字节。 写数据之前,必须保证空间是0xFF
函数参数:
u32 addr:页编程起始地址
u8 *buff:写入的数据缓冲区
u16 len :写入的字节长度
*/
void W25Q64_PageWrite(u32 addr,u8 *buff,u16 len)
{
u16 i;
W25Q64_Enabled(); //写使能
W25Q64_CS=0; //选中芯片
SPI_ReadWriteOneByte(0x02); //页编程指令
SPI_ReadWriteOneByte(addr>>16); //24~16地址
SPI_ReadWriteOneByte(addr>>8); //16~8地址
SPI_ReadWriteOneByte(addr); //8~0地址
for(i=0;i>16); //24~16地址
SPI_ReadWriteOneByte(addr>>8); //16~8地址
SPI_ReadWriteOneByte(addr); //8~0地址
for(i=0;i>16); //24~16地址
SPI_ReadWriteOneByte(addr>>8); //16~8地址
SPI_ReadWriteOneByte(addr); //8~0地址
W25Q64_CS=1; //取消选中芯片
W25Q64_CheckStat(); //检测芯片忙状态
}
/*
函数功能:写使能
*/
void W25Q64_Enabled(void)
{
W25Q64_CS=0; //选中芯片
SPI_ReadWriteOneByte(0x06); //写使能
W25Q64_CS=1; //取消选中芯片
}
/*
函数功能:指定位置写入指定个数的数据,不考虑擦除问题
注意事项:W25Q64只能将1写为,不能将0写为1。
函数参数:
u32 addr---写入数据的起始地址
u8 *buff---写入的数据
u32 len---长度
*/
void W25Q64_WriteByteDataNoCheck(u32 addr,u8 *buff,u32 len)
{
u32 page_remain=256-addr%256; //计算当前页还可以写下多少数据
if(len<=page_remain) //如果当前写入的字节长度小于剩余的长度
{
page_remain=len;
}
while(1)
{
W25Q64_PageWrite(addr,buff,page_remain);
if(page_remain==len)break; //表明数据已经写入完毕
buff+=page_remain; //buff向后偏移地址
addr+=page_remain; //起始地址向后偏移
len-=page_remain; //减去已经写入的字节数
if(len>256)page_remain=256; //如果大于一页,每次就直接写256字节
else page_remain=len;
}
}
/*
函数功能:指定位置写入指定个数的数据,考虑擦除问题,完善代码
函数参数:
u32 addr---写入数据的起始地址
u8 *buff---写入的数据
u32 len---长度
说明:擦除的最小单位扇区,4096字节
*/
static u8 W25Q64_READ_WRITE_CHECK_BUFF[4096];
void W25Q64_WriteByteData(u32 addr,u8 *buff,u32 len)
{
u32 i;
u32 len_w;
u32 sector_addr; //存放扇区的地址
u32 sector_move; //扇区向后偏移的地址
u32 sector_size; //扇区大小。(剩余的空间大小)
u8 *p=W25Q64_READ_WRITE_CHECK_BUFF;//存放指针
sector_addr=addr/4096; //传入的地址是处于第几个扇区
sector_move=addr%4096; //计算传入的地址存于当前的扇区的偏移量位置
sector_size=4096-sector_move; //得到当前扇区剩余的空间
if(len<=sector_size)
{
sector_size=len; //判断第一种可能性、一次可以写完
}
while(1)
{
W25Q64_ReadByteData(addr,p,sector_size); //读取剩余扇区里的数据
for(i=0;i4096) //表明还可以写一个扇区
{
sector_size=4096;//继续写一个扇区
}
else
{
sector_size=len; //剩余的空间可以写完
}
}
}
;i++)>;i++)buff[i]=spi_readwriteonebyte(0xff);>;i++)>
4.2 STM32采用硬件SPI读写W25Q64示例代码
#include "spi.h"
/*
函数功能:SPI初始化(模拟SPI)
硬件连接:
MISO--->PB14
MOSI--->PB15
SCLK--->PB13
*/
void SPI_Init(void)
{
/*1. 开时钟*/
RCC->APB2ENR|=1<<3; //PB
/*2. 配置GPIO口模式*/
GPIOB->CRH&=0x000FFFFF;
GPIOB->CRH|=0x38300000;
/*3. 上拉*/
SPI_MOSI=1;
SPI_MISO=1;
SPI_SCLK=1;
}
/*
函数功能:SPI读写一个字节
*/
u8 SPI_ReadWriteOneByte(u8 data_tx)
{
u8 data_rx=0; //存放读取的数据
u8 i;
for(i=0;i<8;i++)
{
SPI_SCLK=0; //准备发送数据
if(data_tx&0x80)SPI_MOSI=1;
else SPI_MOSI=0;
data_tx<<=1; //依次发送最高位
SPI_SCLK=1; //表示主机数据发送完成,表示从机发送完毕
data_rx<<=1; //表示默认接收的是0
if(SPI_MISO)data_rx|=0x01;
}
return data_rx;
}
#include "W25Q64.h"
/*
函数功能:W25Q64初始化
硬件连接:
MOSI--->PB15
MISO--->PB14
SCLK--->PB13
CS----->PB12
*/
void W25Q64_Init(void)
{
/*1. 开时钟*/
RCC->APB2ENR|=1<<3; //PB
/*2. 配置GPIO口模式*/
GPIOB->CRH&=0xFFF0FFFF;
GPIOB->CRH|=0x00030000;
W25Q64_CS=1; //未选中芯片
SPI_Init(); //SPI初始化
}
/*
函数功能:读取芯片的ID号
*/
u16 W25Q64_ReadID(void)
{
u16 id;
/*1. 拉低片选*/
W25Q64_CS=0;
/*2. 发送读取ID的指令*/
SPI_ReadWriteOneByte(0x90);
/*3. 发送24位的地址-0*/
SPI_ReadWriteOneByte(0);
SPI_ReadWriteOneByte(0);
SPI_ReadWriteOneByte(0);
/*4. 读取芯片的ID*/
id=SPI_ReadWriteOneByte(0xFF)<<8;
id|=SPI_ReadWriteOneByte(0xFF);
/*5. 拉高片选*/
W25Q64_CS=1;
return id;
}
/*
函数功能:检测W25Q64状态
*/
void W25Q64_CheckStat(void)
{
u8 stat=1;
while(stat&1<<0)
{
W25Q64_CS=0; //选中芯片
SPI_ReadWriteOneByte(0x05); //发送读状态寄存器1指令
stat=SPI_ReadWriteOneByte(0xFF); //读取状态
W25Q64_CS=1; //取消选中芯片
}
}
/*
函数功能:页编程
说 明:一页最多写256个字节。 写数据之前,必须保证空间是0xFF
函数参数:
u32 addr:页编程起始地址
u8 *buff:写入的数据缓冲区
u16 len :写入的字节长度
*/
void W25Q64_PageWrite(u32 addr,u8 *buff,u16 len)
{
u16 i;
W25Q64_Enabled(); //写使能
W25Q64_CS=0; //选中芯片
SPI_ReadWriteOneByte(0x02); //页编程指令
SPI_ReadWriteOneByte(addr>>16); //24~16地址
SPI_ReadWriteOneByte(addr>>8); //16~8地址
SPI_ReadWriteOneByte(addr); //8~0地址
for(i=0;i>16); //24~16地址
SPI_ReadWriteOneByte(addr>>8); //16~8地址
SPI_ReadWriteOneByte(addr); //8~0地址
for(i=0;i>16); //24~16地址
SPI_ReadWriteOneByte(addr>>8); //16~8地址
SPI_ReadWriteOneByte(addr); //8~0地址
W25Q64_CS=1; //取消选中芯片
W25Q64_CheckStat(); //检测芯片忙状态
}
/*
函数功能:写使能
*/
void W25Q64_Enabled(void)
{
W25Q64_CS=0; //选中芯片
SPI_ReadWriteOneByte(0x06); //写使能
W25Q64_CS=1; //取消选中芯片
}
/*
函数功能:指定位置写入指定个数的数据,不考虑擦除问题
注意事项:W25Q64只能将1写为,不能将0写为1。
函数参数:
u32 addr---写入数据的起始地址
u8 *buff---写入的数据
u32 len---长度
*/
void W25Q64_WriteByteDataNoCheck(u32 addr,u8 *buff,u32 len)
{
u32 page_remain=256-addr%256; //计算当前页还可以写下多少数据
if(len<=page_remain) //如果当前写入的字节长度小于剩余的长度
{
page_remain=len;
}
while(1)
{
W25Q64_PageWrite(addr,buff,page_remain);
if(page_remain==len)break; //表明数据已经写入完毕
buff+=page_remain; //buff向后偏移地址
addr+=page_remain; //起始地址向后偏移
len-=page_remain; //减去已经写入的字节数
if(len>256)page_remain=256; //如果大于一页,每次就直接写256字节
else page_remain=len;
}
}
/*
函数功能:指定位置写入指定个数的数据,考虑擦除问题,完善代码
函数参数:
u32 addr---写入数据的起始地址
u8 *buff---写入的数据
u32 len---长度
说明:擦除的最小单位扇区,4096字节
*/
static u8 W25Q64_READ_WRITE_CHECK_BUFF[4096];
void W25Q64_WriteByteData(u32 addr,u8 *buff,u32 len)
{
u32 i;
u32 sector_addr; //存放扇区的地址
u32 sector_move; //扇区向后偏移的地址
u32 sector_size; //扇区大小。(剩余的空间大小)
u8 *p=W25Q64_READ_WRITE_CHECK_BUFF;//存放指针
sector_addr=addr/4096; //传入的地址是处于第几个扇区
sector_move=addr%4096; //计算传入的地址存于当前的扇区的偏移量位置
sector_size=4096-sector_move; //得到当前扇区剩余的空间
if(len<=sector_size)
{
sector_size=len; //判断第一种可能性、一次可以写完
}
while(1)
{
W25Q64_ReadByteData(addr,p,sector_size); //读取剩余扇区里的数据
for(i=0;i4096) //表明还可以写一个扇区
{
sector_size=4096;//继续写一个扇区
}
else
{
sector_size=len; //剩余的空间可以写完
}
}
}
;i++)>;i++)buff[i]=spi_readwriteonebyte(0xff);>;i++)>
审核编辑:符乾江
-
STM32驱动FLASH(W25Q64)2023-10-24 3803
-
STM32 SPI读写W25Q64(二)2023-07-22 10778
-
STM32驱动W25Q64读写数据资料2023-04-12 1168
-
Linux驱动开发-编写W25Q64(Flash)驱动2022-09-17 5260
-
【技术精选】嵌入式STM32原创征文活动精选文章2022-07-27 11200
-
介绍W25Q64和驱动函数2022-01-26 1860
-
W25Q64是什么?怎样去使用W25Q64呢2021-12-20 4336
-
STM32入门开发: 介绍SPI总线、读写W25Q64(FLASH)(硬件+模拟时序)2021-12-02 1731
-
【STM32Cube-18】使用硬件QSPI读写SPI Flash(W25Q64)2021-12-01 2712
-
W25Q64串行FLASH基础知识大小2021-07-22 1769
-
w25Q64的中文手册2017-10-19 4417
-
w25Q64中文手册2017-10-16 9450
全部0条评论

快来发表一下你的评论吧 !
