

 STM32 启动流程的详细讲解
STM32 启动流程的详细讲解
电子说
描述
开发环境:
处理器:STM32F103
MDK:5.30
STM32CubeMX:6.0.1
对于我们常用的桌面操作系统而言,我们在开发应用时,并不关心系统的初始化,绝大多数应用程序是在操作系统运行后才开始运行的,操作系统已经提供了一个合适的运行环境,然而对于嵌入式设备而言,在设备上电后,所有的一切都需要由开发者来设置,这里处理器是没有堆栈,没有中断,更没有外围设备,这些工作是需要软件来指定的,而且不同的CPU类型、不同大小的内存和不同种类的外设,其初始化工作都是不同的。本文将以STMF103(基于Cortex-M3)为例进行讲解。
在开始正式讲解之前,你需要了解ARM寄存器、汇编以及反编译相关的知识,这些可以参考笔者博文。
深入理解ARM寄存器:https://bruceou.blog.csdn.net/article/details/117866186
ARM汇编入门:https://bruceou.blog.csdn.net/article/details/117897496
Keil反编译入门(一):https://bruceou.blog.csdn.net/article/details/118314875
Keil反编译入门(二):https://bruceou.blog.csdn.net/article/details/118400368
下面我们就来具体看一下用户从Flash启动STM32的过程,主要讲解从上电复位到main函数的过程。主要有以下步骤:
1.初始化堆栈指针 SP=_initial_sp,初始化 PC 指针=Reset_Handler
2.初始化中断向量表
3.配置系统时钟
4.调用 C 库函数_main 初始化用户堆栈,然后进入 main 函数。
在开始讲解之前,我们需要了解STM32的启动模式。
1 STM32的启动模式
首先要讲一下STM32的启动模式,因为启动模式决定了向量表的位置,STM32有三种启动模式:
1)主闪存存储器(Main Flash)启动:从STM32内置的Flash启动(0x0800 0000-0x0807 FFFF),一般我们使用JTAG或者SWD模式下载程序时,就是下载到这个里面,重启后也直接从这启动程序。以0x08000000 对应的内存为例,则该块内存既可以通过0x00000000 操作也可以通过0x08000000 操作,且都是操作的同一块内存。
2)系统存储器(System Memory)启动:从系统存储器启动(0x1FFFF000 - 0x1FFF F7FF),这种模式启动的程序功能是由厂家设置的。一般来说,我们选用这种启动模式时,是为了从串口下载程序,因为在厂家提供的ISP程序中,提供了串口下载程序的固件,可以通过这个ISP程序将用户程序下载到系统的Flash中。以0x1FFFFFF0对应的内存为例,则该块内存既可以通过0x00000000 操作也可以通过0x1FFFFFF0操作,且都是操作的同一块内存。
3)片上SRAM启动:从内置SRAM启动(0x2000 0000-0x3FFFFFFF),既然是SRAM,自然也就没有程序存储的能力了,这个模式一般用于程序调试。SRAM 只能通过0x20000000进行操作,与上述两者不同。从SRAM 启动时,需要在应用程序初始化代码中重新设置向量表的位置。
用户可以通过设置BOOT0和BOOT1的引脚电平状态,来选择复位后的启动模式。如下图所示:

启动模式只决定程序烧录的位置,加载完程序之后会有一个重映射(映射到0x00000000地址位置);真正产生复位信号的时候,CPU还是从开始位置执行。
值得注意的是STM32上电复位以后,代码区都是从0x00000000开始的,三种启动模式只是将各自存储空间的地址映射到0x00000000中。
2 STM32的启动文件分析
因为启动过程主要是由汇编完成的,因此STM32的启动的大部分内容都是在启动文件里。笔者的启动文件是startup_stm32f103xe.s,不管使用标准库还是使用HAL库,启动文件都是差不多的。
2.1堆栈定义
1. Stack栈
栈的作用是用于局部变量,函数调用,函数形参等的开销,栈的大小不能超过内部SRAM 的大小。当程序较大时,需要修改栈的大小,不然可能会出现的HardFault的错误。

第33行:表示开辟栈的大小为 0X00000400(1KB),EQU是伪指令,相当于C 中的 define。
第35行:开辟一段可读可写数据空间,ARER 伪指令表示下面将开始定义一个代码段或者数据段。此处是定义数据段。ARER 后面的关键字表示这个段的属性。段名为STACK,可以任意命名;NOINIT 表示不初始化;READWRITE 表示可读可写,ALIGN=3,表示按照 8 字节对齐。
第36行:SPACE 用于分配大小等于 Stack_Size连续内存空间,单位为字节。
第37行: __initial_sp表示栈顶地址。栈是由高向低生长的。
2.Heap堆
堆主要用来动态内存的分配,像 malloc()函数申请的内存就在堆中。
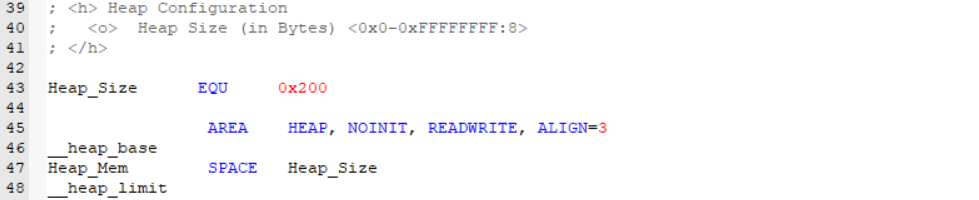
开辟堆的大小为 0X00000200(512 字节),名字为 HEAP,NOINIT 即不初始化,可读可写,8字节对齐。__heap_base 表示对的起始地址,__heap_limit 表示堆的结束地址。
2.2向量表
向量表是一个WORD( 32 位整数)数组,每个下标对应一种异常,该下标元素的值则是该 ESR 的入口地址。向量表在地址空间中的位置是可以设置的,通过 NVIC 中的一个重定位寄存器来指出向量表的地址。在复位后,该寄存器的值为 0。因此,在地址 0 (即 FLASH 地址 0)处必须包含一张向量表,用于初始时的异常分配。
值得注意的是这里有个另类: 0 号类型并不是什么入口地址,而是给出了复位后 MSP 的初值,后面会具体讲解。
……

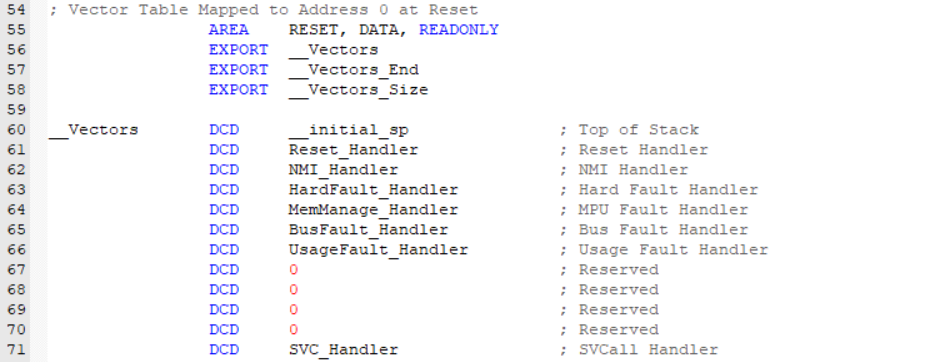
第55行:定义一块代码段,段名字是RESET,READONLY 表示只读。
第56-58行:使用EXPORT将3个标识符申明为可被外部引用,声明 __Vectors、__Vectors_End 和__Vectors_Size 具有全局属性。
第60行:__Vectors 表示向量表起始地址,DCD 表示分配 1 个 4 字节的空间。每行 DCD 都会生成一个 4 字节的二进制代码,中断向量表 存放的实际上是中断服务程序的入口地址。当异常(也即是中断事件)发生时,CPU 的中断系统会将相应的入口地址赋值给 PC 程序计数器,之后就开始执行中断服务程序。在60行之后,依次定义了中断服务程序的入口地址。
第138行:__Vectors_End 为向量表结束地址。
第139行:__Vectors_Size则是向量表的大小,向量表的大小是通过__Vectors 和__Vectors_End 相减得到的。
上述向量表可以在《Reference manual》中找到的,笔者这里只截取了部分。

2.3复位程序
复位程序是系统上电后执行的第一个程序,复位程序也是中断程序,只是这个程序比较特殊,因此单独提出来讲解。

第145行:定义了一个服务程序,PROC表示程序的开始。
第146行:使用EXPORT将Reset_Handler申明为可被外部引用,后面WEAK表示弱定义,如果外部文件定义了该标号则首先引用该标号,如果外部文件没有声明也不会出错。这里表示复位程序可以由用户在其他文件重新实现,这种写法在HAL库中是很常见的。
第147-148行:表示该标号来自外部文件,SystemInit()是一个库函数,在system_stm32f1xx.c中定义的,__main 是一个标准的 C 库函数,主要作用是初始化用户堆栈,这个是由编译器完成的,该函数最终会调用我们自己写的main函数,从而进入C世界中。
第149行:这是一条汇编指令,表示从存储器中加载SystemInit到一个寄存器R0的地址中。
第150行:汇编指令,表示跳转到寄存器R0的地址,并根据寄存器的 LSE 确定处理器的状态,还要把跳转前的下条指令地址保存到 LR。
第151行:和149行是一个意思,表示从存储器中加载__main到一个寄存器R0的地址中。
第152行:和150稍微不同,这里跳转到至指定寄存器的地址后,不会返回。
第153行:和PROC是对应的,表示程序的结束。
2.4中断服务程序
我们平时要使用哪个中断,就需要编写相应的中断服务程序,只是启动文件把这些函数留出来了,但是内容都是空的,真正的中断复服务程序需要我们在外部的 C 文件里面重新实现,这里只是提前占了一个位置罢了。
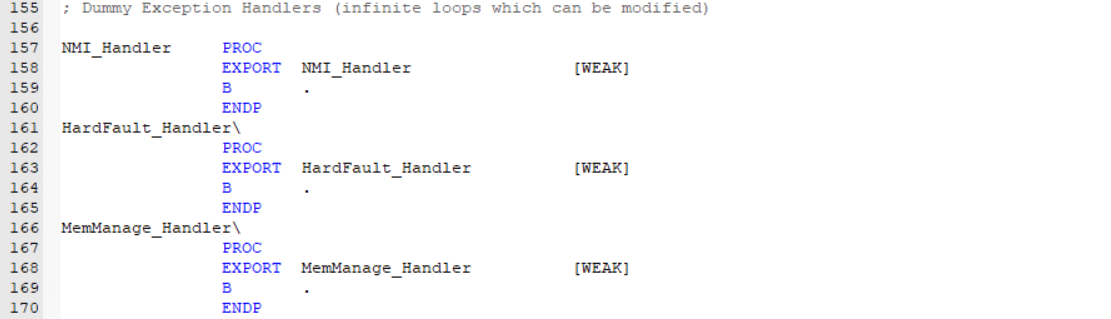
这部分没啥好说的,和服务程序类似的,只需要注意‘B .’语句,B表示跳转,这里跳转到一个‘.’,即表示无线循环。
2.5堆栈初始化
堆栈初始化是由一个IF条件来实现的,MICROLIB的定义与否决定了堆栈的初始化方式。
这个定义是在Options->Target中设置的。
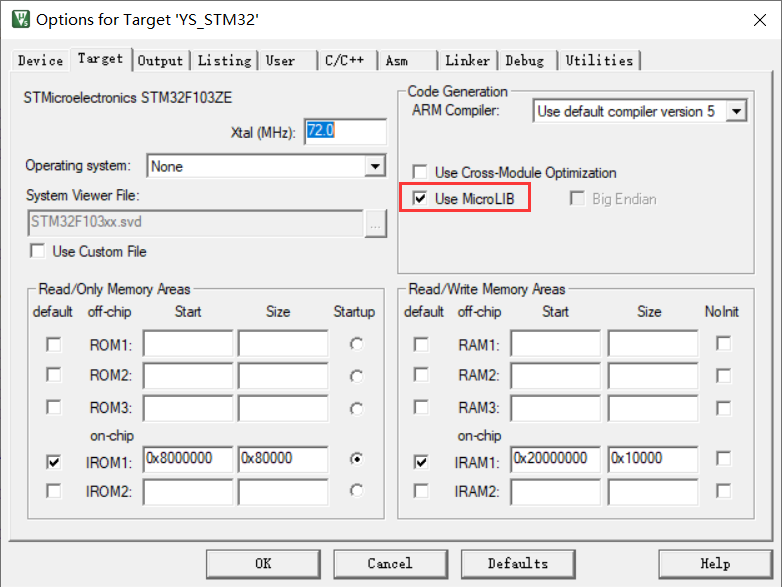
如果没有定义__MICROLIB , 则会使用双段存储器模式,且声明了__user_initial_stackheap 具有全局属性,这需要开发者自己来初始化堆栈。
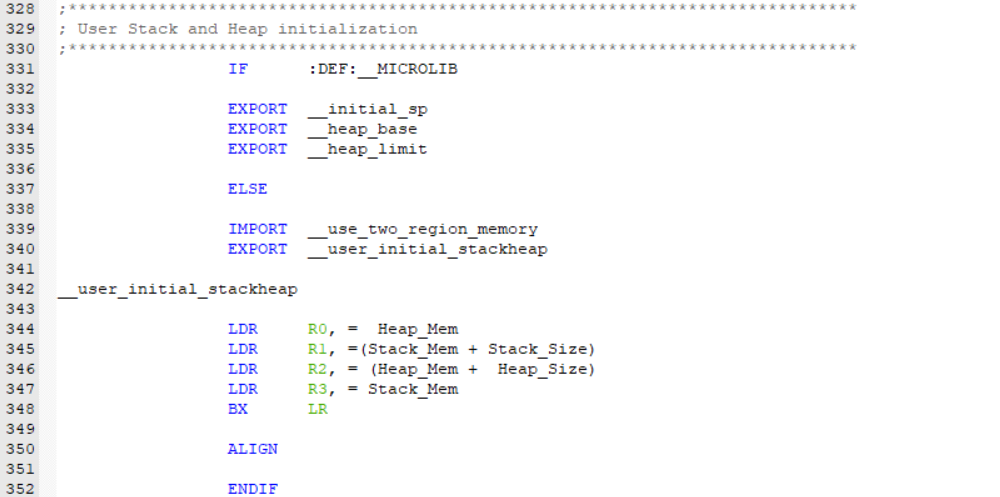
这部分也没啥讲的,需要注意的是,ALIGN表示对指令或者数据存放的地址进行对齐,缺省表示4字节对齐。
2.6其他

第50行:PRESERVE8 用于指定当前文件的堆栈按照 8 字节对齐。
第51行:THUMB 表示后面指令兼容 THUMB 指令。现在 Cortex-M 系列的都使用 THUMB-2 指令集,THUMB-2 是 32 位的,兼容 16 位和 32 位的指令,是 THUMB 的超集。
3 STM32的启动流程实例分析
有了前面的分析,接下来就来具体看看STM32启动流程的具体内容。
3.1初始化SP、PC、向量表
当系统复位后,处理器首先读取向量表中的前两个字(8 个字节),第一个字存入 MSP,第二个字为复位向量,也就是程序执行的起始地址。

这里通过J-Flash打开hex文件。
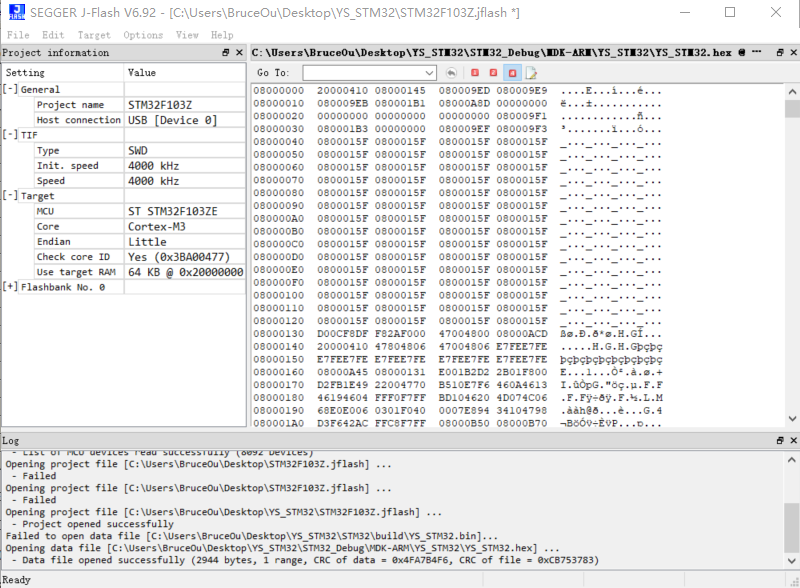
硬件这时自动从0x0800 0000位置处读取数据赋给栈指针SP,然后自动从0x0800 0004位置处读取数据赋给PC,完成了复位操作,SP= 0x0200 0410,PC = 0x0800 0145。
初始化SP、PC紧接着就初始化向量表,如果感觉看HEX文件抽象,我们看看反汇编文件吧。
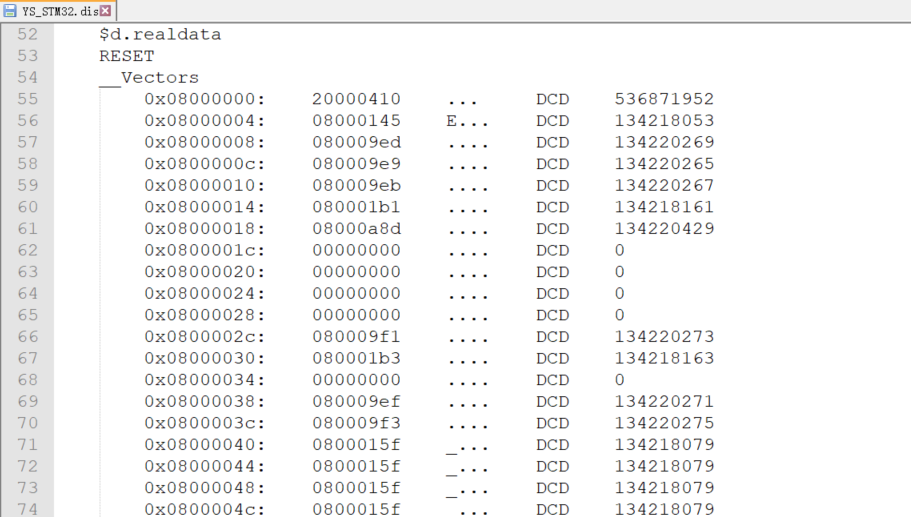
是不是更容易些,是不是和《Reference manual》中的向量表对应起来了。其实看反汇编文件更好理解STM32的启动流程,只是有些抽象。
3.2设置系统时钟
细心的朋友可能发现,PC=0x08000145的地址是没有对齐的。然后在反汇编文件中却是这样的:
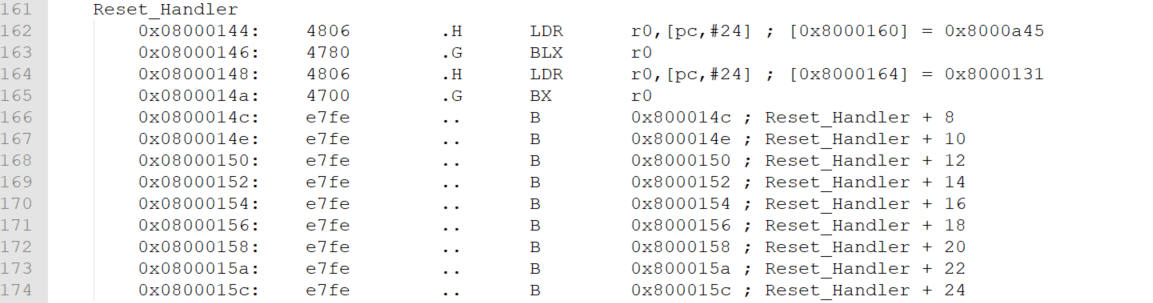
这里是硬件自动对齐到 0x08000144,并执行SystemInit函数初始化系统时钟。
当然也可通过硬件调试来确认上面的分析:
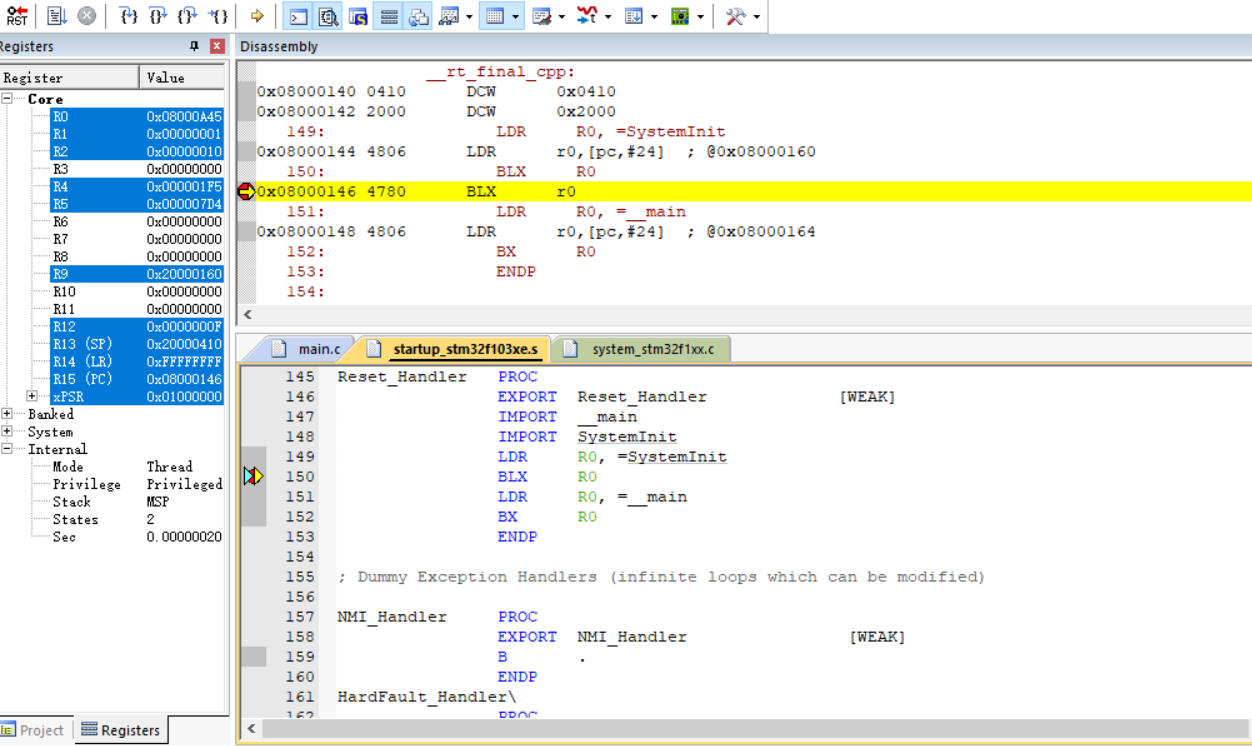
接下来就会进入SystemInit函数中。

SystemInit函数内容如下:
/**
* @brief Setup the microcontroller system
* Initialize the Embedded Flash Interface, the PLL and update the
* SystemCoreClock variable.
* @note This function should be used only after reset.
* @param None
* @retval None
*/
void SystemInit (void)
{
/* Reset the RCC clock configuration to the default reset state(for debug purpose) */
/* Set HSION bit */
RCC->CR |= 0x00000001U;
/* Reset SW, HPRE, PPRE1, PPRE2, ADCPRE and MCO bits */
#if !defined(STM32F105xC) && !defined(STM32F107xC)
RCC->CFGR &= 0xF8FF0000U;
#else
RCC->CFGR &= 0xF0FF0000U;
#endif /* STM32F105xC */
/* Reset HSEON, CSSON and PLLON bits */
RCC->CR &= 0xFEF6FFFFU;
/* Reset HSEBYP bit */
RCC->CR &= 0xFFFBFFFFU;
/* Reset PLLSRC, PLLXTPRE, PLLMUL and USBPRE/OTGFSPRE bits */
RCC->CFGR &= 0xFF80FFFFU;
#if defined(STM32F105xC) || defined(STM32F107xC)
/* Reset PLL2ON and PLL3ON bits */
RCC->CR &= 0xEBFFFFFFU;
/* Disable all interrupts and clear pending bits */
RCC->CIR = 0x00FF0000U;
/* Reset CFGR2 register */
RCC->CFGR2 = 0x00000000U;
#elif defined(STM32F100xB) || defined(STM32F100xE)
/* Disable all interrupts and clear pending bits */
RCC->CIR = 0x009F0000U;
/* Reset CFGR2 register */
RCC->CFGR2 = 0x00000000U;
#else
/* Disable all interrupts and clear pending bits */
RCC->CIR = 0x009F0000U;
#endif /* STM32F105xC */
#if defined(STM32F100xE) || defined(STM32F101xE) || defined(STM32F101xG) || defined(STM32F103xE) || defined(STM32F103xG)
#ifdef DATA_IN_ExtSRAM
SystemInit_ExtMemCtl();
#endif /* DATA_IN_ExtSRAM */
#endif
#ifdef VECT_TAB_SRAM
SCB->VTOR = SRAM_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal SRAM. */
#else
SCB->VTOR = FLASH_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal FLASH. */
#endif
}
前面部分是配置时钟的,具体参考手册吧,这里需要注意以下代码:
#ifdef VECT_TAB_SRAM
SCB->VTOR = SRAM_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal SRAM. */
#else
SCB->VTOR = FLASH_BASE | VECT_TAB_OFFSET; /* Vector Table Relocation in Internal FLASH. */
#endif
默认是没有开启VECT_TAB_SRAM,则从FLASH中启动,VTOR 寄存器存放的是中断向量表的起始地址,在IAP升级会修改这里的偏移量,后面讲解IAP升级在细讲吧。
3.3初始化堆栈并进入main
执行指令LDR R0, =__main,然后就跳转到__main程序段运行,当然这里指标准库的__main函数。
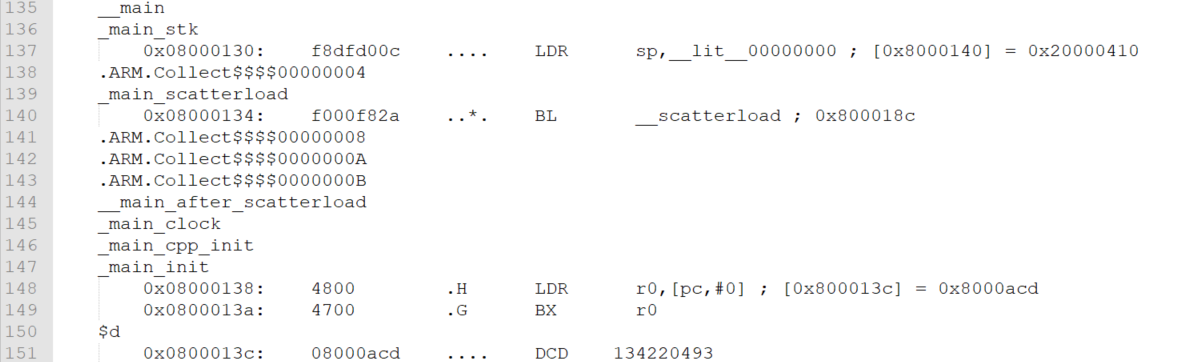
这中间初始化了栈区。
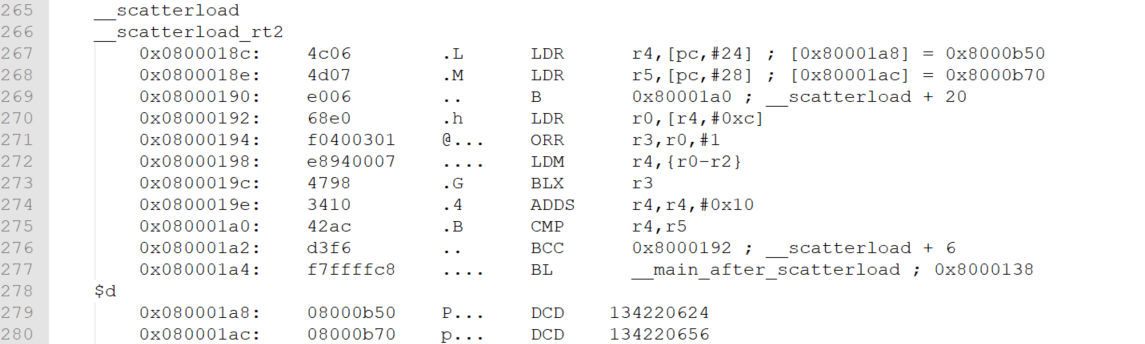
这段代码是个循环(BCC 0x08000192),实际运行时候循环了两次。第一次运行的时候,读取“加载数据段的函数”的地址并跳转到该函数处运行(注意加载已初始化数据段和未初始化数据段用的是同一个函数);第二次运行的时候,读取“初始化栈的函数”的地址并跳转到该函数处运行。
最后就进入C文件的main函数中,至此,启动过程到此结束。
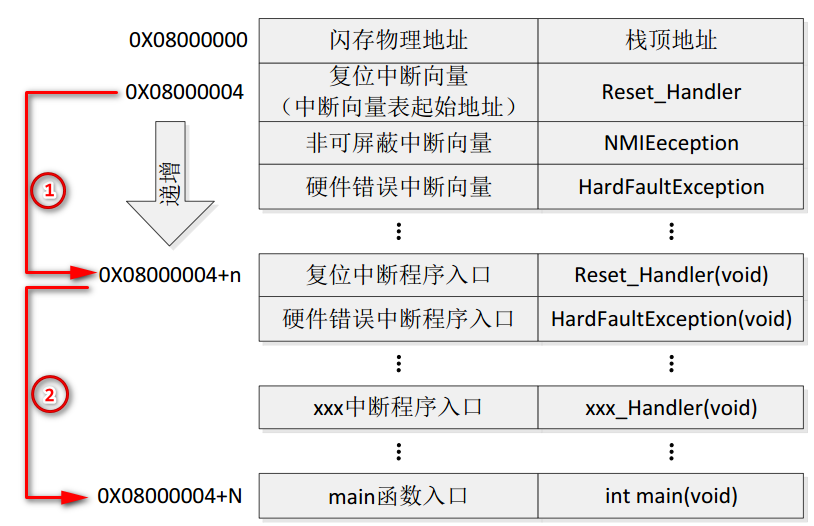
最后,总结下STM32 从flash的启动流程。
MCU上电后从0x0800 0000处读取栈顶地址并保存,然后从0x0800 0004读取中断向量表的起始地址,这就是复位程序的入口地址,接着跳转到复位程序入口处,初始向量表,然后设置时钟,设置堆栈,最后跳转到C空间的main函数,即进入用户程序。
审核编辑:符乾江
-
STM32自定义USB设备开发详细流程讲解2019-08-03 7287
-
stm32上电之后的启动流程2022-01-25 893
-
STM32启动文件步骤及启动代码讲解2022-02-21 1802
-
STM32电机库讲解2016-03-23 1906
-
STM32系列的串口进行详细的讲解2016-06-17 611
-
stm32串口通信流程图2020-03-03 10748
-
STM32:启动文件分析2021-11-30 871
-
STM32启动过程分析2021-12-23 1029
-
STM32三种启动模式与详细步骤说明2022-05-16 8401
-
STM32启动文件简介、详细步骤及代码讲解2023-01-19 8702
-
详解STM32启动文件2023-06-10 1794
-
Linux内核启动流程(上)2023-06-23 2677
-
详细的STM32启动配置流程解析2023-07-01 3282
-
STM32的完整启动流程分析2023-10-25 2691
-
第12章-ADC采集电压和显示 基于STM32的ADC—电压采集(详细讲解+HAL库)2024-08-21 7575
全部0条评论

快来发表一下你的评论吧 !
