

 ZMC420SCAN控制器如何操作进行双振镜运动
ZMC420SCAN控制器如何操作进行双振镜运动
今日头条
描述
今天,正运动小助手给大家分享一下运动控制器之ZMC420SCAN控制器如何操作进行双振镜运动。
一ZMC420SCAN硬件介绍
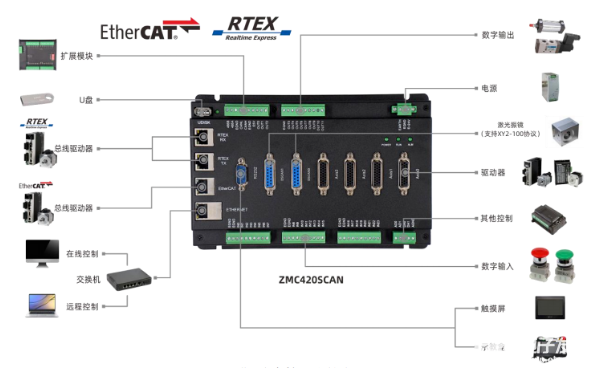
1.功能介绍
ZMC42 0SCAN总线控制器支持ECAT/RTEX总线连接,支持最多达20轴运动控制,支持直线插补、任意圆弧插补、空间圆弧、螺旋插补、电子凸轮、电子齿轮、同步跟随、虚拟轴设置等; 采用优化的网络通讯协议可以实现实时的运动控制。ZMC420SCAN总线控制器支持脉冲轴/总线轴/振镜轴混合插补。
ZMC420SCAN系列运动控制器支持以太网,RS232通讯接口和电脑相连,接收电脑的指令运行,可以通过CAN总线去连接各个扩展模块,从而扩展输入输出点数或运动轴。
ZMC420SCAN系列运动控制卡的应用程序可以使用VC,VB,VS,C++,C#等软件来开发,程序运行时需要动态库zmotion.dll。调试时可以把ZDevelop软件同时连接到控制器,从而方便调试、方便观察。
2.硬件接口
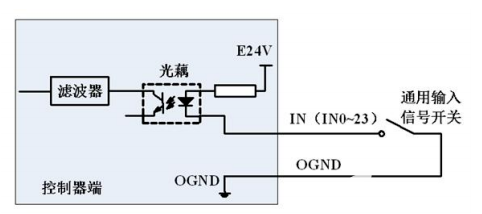
通用输入口电路
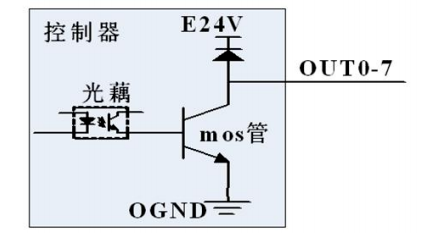
通用输出口电路
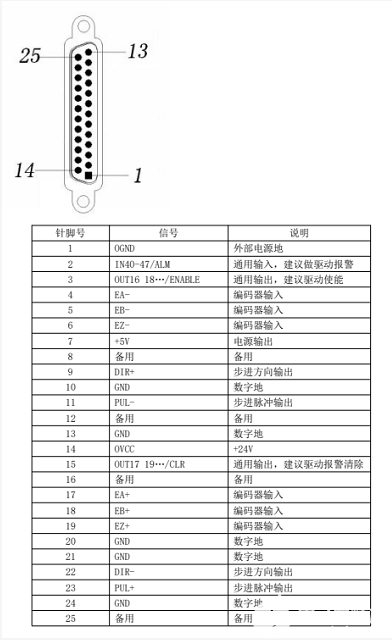
本地脉冲轴说明
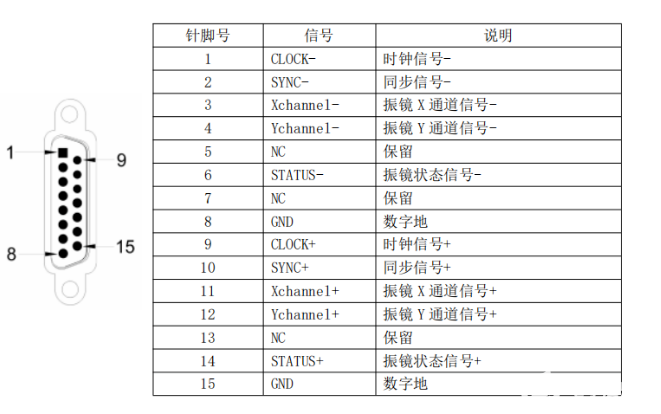
本地振镜轴接口说明
3.振镜控制过程
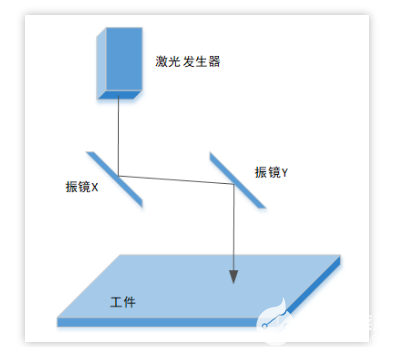
激光振镜是一种专门用于激光加工领域的特殊的运动器件,激光振镜头内包含的主要元件是激光发生器,两个电机和两个振镜片,它靠两个电机分别控制两个振镜片X和Y反射激光,形成XY平面的运动,这两个电机使用控制器上的振镜轴接口控制。
激光振镜不同于一般的电机,激光振镜具有非常小的惯量,且在运动的过程中负载非常小,只需要带动反射镜片,系统的响应非常快。
振镜工作
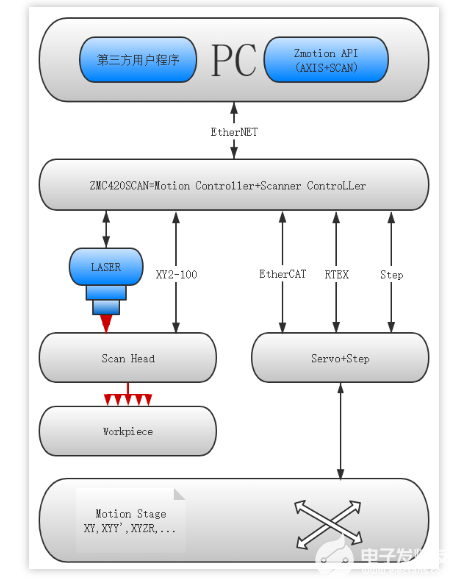
ZMC420SC AN支持XY2-100振镜协议,支持运动控制与振镜联合插补运动。
上位机通过网口与控制器相连,通过XY2-100振镜协议进行控制振镜轴的运动,通过总线协议或者脉冲模式控制伺服轴运动。
使用ZMC420SCAN控制器的振镜轴接口连接激光振镜头,每个振镜轴接口内包含两路振镜通道信号,分别控制振镜片X、Y的偏转,从而控制了激光打到工件的位置。
4. 控制器PWM模拟量介绍
ZMC420SCAN的外部通用输出口0-11都具有PWM输出功能,PWM 输出受正常输出功能的控制,只有输出口状态ON的时候PWM才能实际输出,这样可以用来控制激光能量 。

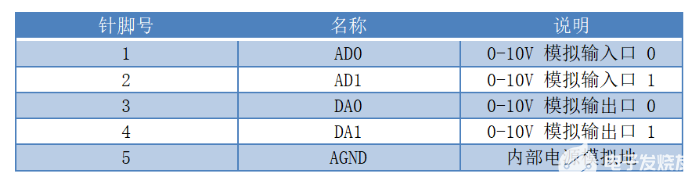
ZMC420SCAN控制器存在两路模拟量输入输出,可进行控制激光器能量输出,模拟量精度为12位。(DA采用了内部电源)
5.控制器基本信息
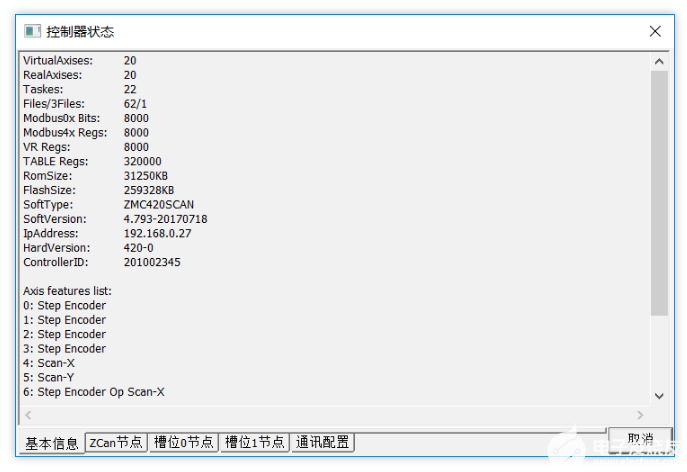
轴0-3为普通脉冲轴,振镜0为轴4、轴5控制振镜XY,振镜1为轴6、轴7控制XY。
二C++ 进行振镜+运动控制开发
1. 新建MFC项目并添加函数库
(1)在VS2015菜单“文件”→“新建”→ “项目”,启动创建项目向导。
(2)选择开发语言为“Visual C++”和程序类型“MFC应用程序”。

(3)点击下一步即可。
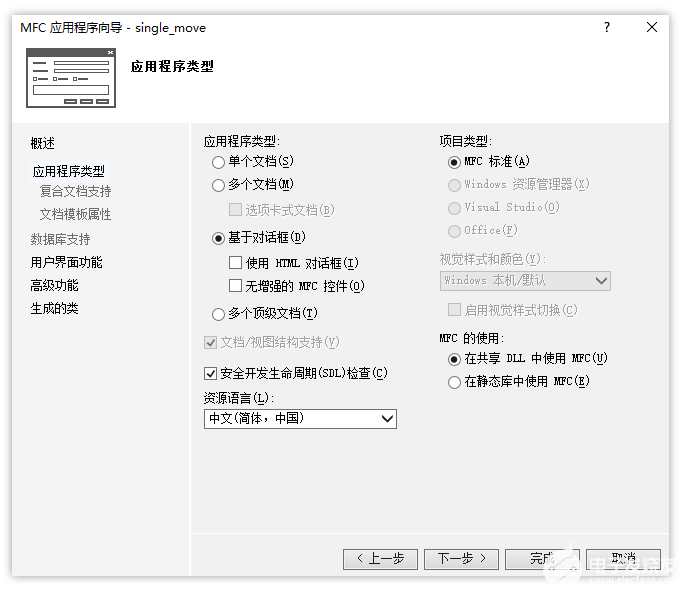
(4)选择类型为“基于对话框”,下一步或者完成。
(5)找到厂家提供的光盘资料,路径如下(64位库为例)。
A.进入厂商提供的光盘资料找到“8.PC函数”文件夹,并点击进入。

B.选择“函数库2.1”文件夹。
C.选择“Windows平台”文件夹。
D.根据需要选择对应的函数库这里选择64位库。
E.解压C++的压缩包,里面有C++对应的函数库。
F.函数库具体路径如下。

(6)将厂商提供的C++的库文件和相关头文件复制到新建的项目里面。
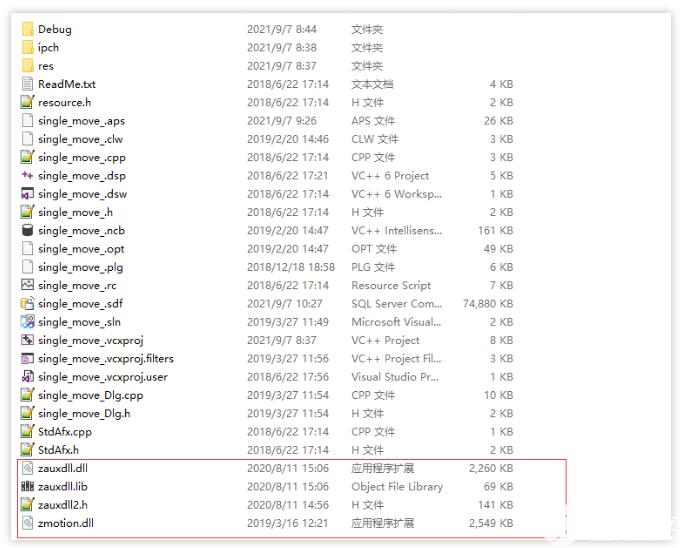
(7)在项目中添加静态库和相关头文件。
A.先右击项目文件,接着依次选择:“添加”→“现有项”。

B.在弹出的窗口中依次添加静态库和相关头文件。
(8)声明用到的头文件和定义控制器连接句柄。
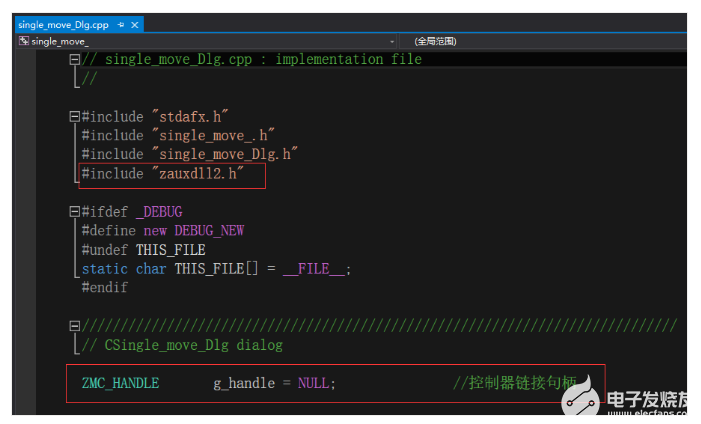
至此项目新建完成,可进行MFC项目开发。
2.查看PC函数手册,熟悉相关函数接口
(1)PC函数手册也在光盘资料里面,具体路径如下:“光盘资料\8.PC函数\函数库2.1\ZMotion函数库编程手册 V2.1.pdf”
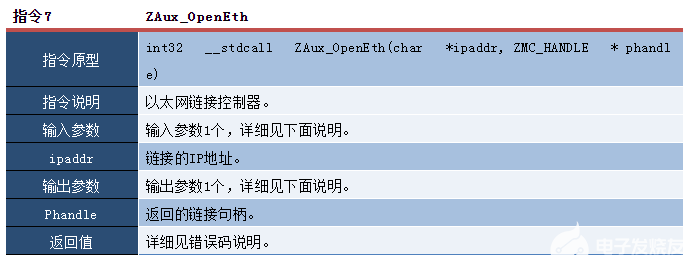
(2)链接控制器,获取链接句柄。
ZAux_OpenEth()接口说明:
(3)振镜运动接口。
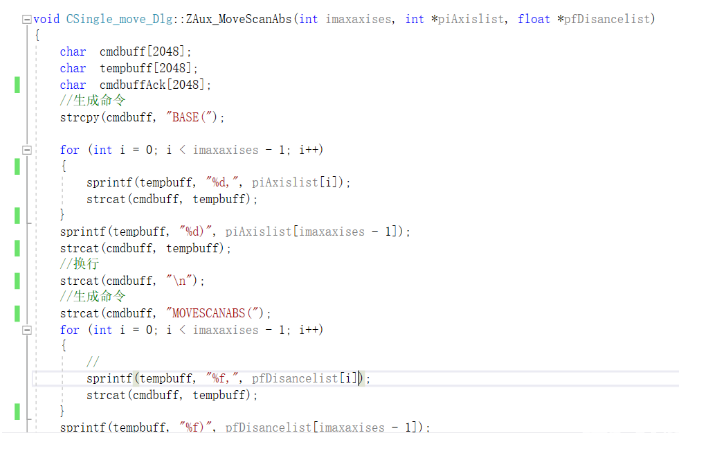
为振镜运动单独封装了一个运动接口,使用movescanabs指令进行运动,采用FORCE_SPEED参数设置运动过程中的速度,运动过程中基本不存在加减速过程,支持us级别的时间控制。
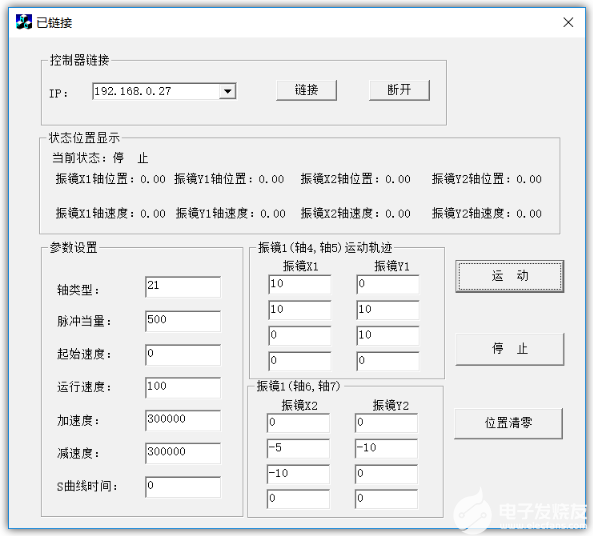
3. MFC开发控制器双振镜运动例程
(1)例程界面如下。
(2) 链接按钮的事件处理函数中调用链接控制器的接口函数 ZAux_OpenEth(),与控制器进行链接,链接成功后启动定时器1监控控制器状态。
//网口链接控制器
void CSingle_move_Dlg::OnOpen()
{
char buffer[256];
int32 iresult;
//如果已经链接,则先断开链接
if(NULL != g_handle)
{
ZAux_Close(g_handle);
g_handle = NULL;
}
//从IP下拉框中选择获取IP地址
GetDlgItemText(IDC_IPLIST,buffer,255);
buffer[255] = '\0';
//开始链接控制器
iresult = ZAux_OpenEth(buffer, &g_handle);
if(ERR_SUCCESS != iresult)
{
g_handle = NULL;
MessageBox(_T("链接失败"));
SetWindowText("未链接");
return;
}
//链接成功开启定时器1
SetWindowText("已链接");
SetTimer( 1, 100, NULL );
}
(3)通过定时器监控控制器状态 。
void CSingle_move_Dlg::OnTimer(UINT_PTR nIDEvent)
{
// TODO: Add your message handler code here and/or call default
if(NULL == g_handle)
{
MessageBox(_T("链接断开"));
return ;
}
if(1 == nIDEvent)
{
CString string;
float position = 0;
ZAux_Direct_GetDpos( g_handle,m_nAxis,&position); //获取当前轴位置
string.Format("振镜X1轴位置:%.2f", position );
GetDlgItem( IDC_CURPOS )->SetWindowText( string );
float NowSp = 0;
ZAux_Direct_GetVpSpeed( g_handle,m_nAxis,&NowSp); //获取当前轴速度
string.Format("振镜X1轴速度:%.2f", NowSp );
GetDlgItem( IDC_CURSPEED)->SetWindowText( string );
ZAux_Direct_GetDpos(g_handle, m_nAxis+1, &position); //获取当前轴位置
string.Format("振镜Y1轴位置:%.2f", position);
GetDlgItem(IDC_CURPOS2)->SetWindowText(string);
ZAux_Direct_GetVpSpeed(g_handle, m_nAxis+1, &NowSp); //获取当前轴速度
string.Format("振镜Y1轴速度:%.2f", NowSp);
GetDlgItem(IDC_CURSPEED2)->SetWindowText(string);
ZAux_Direct_GetDpos(g_handle, m_nAxis + 2, &position); //获取当前轴位置
string.Format("振镜X2轴位置:%.2f", position);
GetDlgItem(IDC_CURPOS3)->SetWindowText(string);
NowSp = 0;
ZAux_Direct_GetVpSpeed(g_handle, m_nAxis + 2, &NowSp); //获取当前轴速度
string.Format("振镜X2轴速度:%.2f", NowSp);
GetDlgItem(IDC_CURSPEED3)->SetWindowText(string);
ZAux_Direct_GetDpos(g_handle, m_nAxis + 3, &position); //获取当前轴位置
string.Format("振镜Y2轴位置:%.2f", position);
GetDlgItem(IDC_CURPOS4)->SetWindowText(string);
ZAux_Direct_GetVpSpeed(g_handle, m_nAxis + 3, &NowSp); //获取当前轴速度
string.Format("振镜Y2轴速度:%.2f", NowSp);
GetDlgItem(IDC_CURSPEED4)->SetWindowText(string);
int status = 0;
ZAux_Direct_GetIfIdle(g_handle, m_nAxis,&status); //判断当前轴状态
if (status == -1)
{
GetDlgItem( IDC_CURSTATE )->SetWindowText( "当前状态:停 止" );
}
else
{
GetDlgItem( IDC_CURSTATE )->SetWindowText( "当前状态:运动中" );
}
}
CDialog::OnTimer(nIDEvent);
}
(4)通过启动按钮的事件处理函数获取编辑框的移动轨迹,并设置振镜轴参数操作振镜轴运动。
void CSingle_move_Dlg::OnStart() //启动运动
{
if(NULL == g_handle)
{
MessageBox(_T("链接断开状态"));
return ;
}
UpdateData(true);//刷新参数
int status = 0;
ZAux_Direct_GetIfIdle(g_handle, m_nAxis,&status); //判断当前轴状态
if (status == 0) //已经在运动中
{
return;
}
//设定轴类型 1-脉冲轴类型
for (int i = 4; i < 8; i++)
{
ZAux_Direct_SetAtype(g_handle, i, m_Atype);
ZAux_Direct_SetMerge(g_handle,i,1);
//设置脉冲当量
ZAux_Direct_SetUnits(g_handle, i, m_units);
//设定速度,加减速
ZAux_Direct_SetLspeed(g_handle, i, m_lspeed);
ZAux_Direct_SetSpeed(g_handle, i, m_speed);
ZAux_Direct_SetForceSpeed(g_handle, i, m_speed);
ZAux_Direct_SetAccel(g_handle, i, m_acc);
ZAux_Direct_SetDecel(g_handle, i, m_dec);
//设定S曲线时间 设置为0表示梯形加减速
ZAux_Direct_SetSramp(g_handle, i, m_sramp);
}
//使用MOVESCANABS运动
int axislist[2] = { 4,5 };
float dposlist[2] = { 0,0 };
ZAux_MoveScanAbs(2, axislist, dposlist);
CString str;
GetDlgItem(IDC_EDIT_POSX1)->GetWindowText(str);
float dbx = atof(str);
GetDlgItem(IDC_EDIT_POSY1)->GetWindowText(str);
float dby = atof(str);
dposlist[0] = dbx;
dposlist[1] = dby;
ZAux_MoveScanAbs(2, axislist, dposlist);
GetDlgItem(IDC_EDIT_POSX2)->GetWindowText(str);
dbx = atof(str);
GetDlgItem(IDC_EDIT_POSY2)->GetWindowText(str);
dby = atof(str);
dposlist[0] = dbx;
dposlist[1] = dby;
ZAux_MoveScanAbs(2, axislist, dposlist);
GetDlgItem(IDC_EDIT_POSX3)->GetWindowText(str);
dbx = atof(str);
GetDlgItem(IDC_EDIT_POSY3)->GetWindowText(str);
dby = atof(str);
dposlist[0] = dbx;
dposlist[1] = dby;
ZAux_MoveScanAbs(2, axislist, dposlist);
GetDlgItem(IDC_EDIT_POSX4)->GetWindowText(str);
dbx = atof(str);
GetDlgItem(IDC_EDIT_POSY4)->GetWindowText(str);
dby = atof(str);
dposlist[0] = dbx;
dposlist[1] = dby;
ZAux_MoveScanAbs(2, axislist, dposlist);
//第二个振镜运动
//使用MOVESCANABS运动
axislist[0] = 6;
axislist[1] = 7;
dposlist[0] = 0;
dposlist[1] = 0;
ZAux_MoveScanAbs(2, axislist, dposlist);
GetDlgItem(IDC_EDIT_POSX5)->GetWindowText(str);
dbx = atof(str);
GetDlgItem(IDC_EDIT_POSY5)->GetWindowText(str);
dby = atof(str);
dposlist[0] = dbx;
dposlist[1] = dby;
ZAux_MoveScanAbs(2, axislist, dposlist);
GetDlgItem(IDC_EDIT_POSX6)->GetWindowText(str);
dbx = atof(str);
GetDlgItem(IDC_EDIT_POSY6)->GetWindowText(str);
dby = atof(str);
dposlist[0] = dbx;
dposlist[1] = dby;
ZAux_MoveScanAbs(2, axislist, dposlist);
GetDlgItem(IDC_EDIT_POSX7)->GetWindowText(str);
dbx = atof(str);
GetDlgItem(IDC_EDIT_POSY7)->GetWindowText(str);
dby = atof(str);
dposlist[0] = dbx;
dposlist[1] = dby;
ZAux_MoveScanAbs(2, axislist, dposlist);
GetDlgItem(IDC_EDIT_POSX8)->GetWindowText(str);
dbx = atof(str);
GetDlgItem(IDC_EDIT_POSY8)->GetWindowText(str);
dby = atof(str);
dposlist[0] = dbx;
dposlist[1] = dby;
ZAux_MoveScanAbs(2, axislist, dposlist);
UpdateData(false);
}
(5) 通过断开按钮的事件处理函数来断开与控制卡的连接。
void CSingle_move_Dlg::OnClose() //断开链接
{
// TODO: Add your control notification handler code here
if(NULL != g_handle)
{
KillTimer(1); //关定时器
KillTimer(2);
ZAux_Close(g_handle);
g_handle = NULL;
SetWindowText("未链接");
}
}
(6)通过坐标清零按钮的事件处理函数移动振镜轴回零到中心零点位置,不直接使用dpos=0,修改振镜轴坐标。
void CSingle_move_Dlg::OnZero() //清零坐标
{
if(NULL == g_handle)
{
MessageBox(_T("链接断开状态"));
return ;
}
// TODO: Add your control notification handler code here
int axislist[2] = { 4,5 };
float dposlist[2] = { 0 };
ZAux_Direct_MoveAbs(g_handle,2,axislist,dposlist); //设置运动回零点
}
三调试与监控
编译运行例程,同时通过ZDevelop软件连接控制器对控制器状态进行监控 。
1. ZDevelop软件连接控制器监控控制器的状态,查看振镜轴对应参数,并可搭配示波器检测双振镜轨迹。
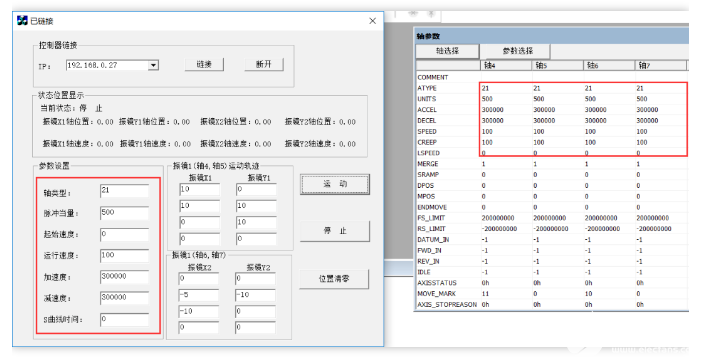
设置振镜轴运动,首先需要将轴类型配置成 21振镜轴类型,并对应配置振镜轴的速度加减速等参数才可操作振镜进行运动。
2. 通过ZDevelop软件的示波器监控双振镜运动运行轨迹。
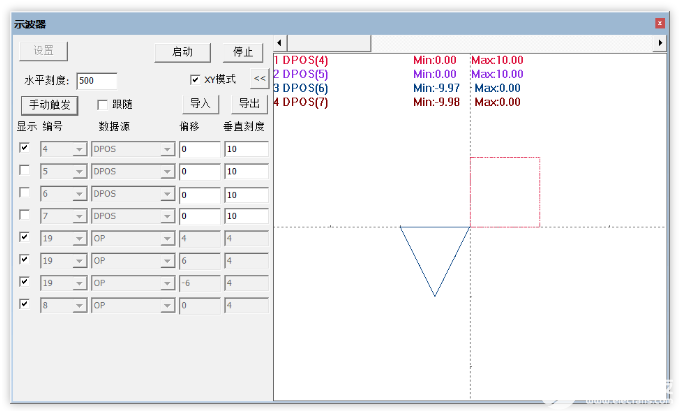
示波器双振镜运动的运行轨迹示例图
本次,正运动技术开放式激光振镜+运动控制器(六):双振镜运动,就分享到这里。
审核编辑:汤梓红
-
激光振镜运动控制器ZMC408SCAN-V2用户手册2023-06-08 914
-
【资料】正运动ZMC408SCAN控制器用户手册2023-05-10 5588
-
正运动激光振镜运动控制器ZMC408SCAN用户手册2023-04-11 991
-
开放式激光振镜运动控制器ZMC408SCAN进行振镜矫正的方法与实现2022-10-31 3716
-
ZMC408SCAN振镜控制光纤激光器加工的方法2022-10-26 3630
-
应用ZMC408SCAN开放式激光振镜运动控制器的C++开发2022-10-24 3350
-
开放式激光振镜运动控制器:C++快速开发2022-10-19 2796
-
ZMC408SCAN振镜控制光纤激光器加工2022-09-14 3505
-
激光振镜运动控制器(一):ZMC408SCAN接口与功能2022-08-01 4585
-
开放式激光振镜+运动控制器(五):ZMC408SCAN控制器2022-03-03 2914
-
ZMC420SCAN系列运动控制器硬件介绍2022-02-18 2947
-
运动控制器之ZMC420SCAN的硬件接口2022-02-16 2706
全部0条评论

快来发表一下你的评论吧 !
