

串行通信的应用场合
描述
通信的种类和方式有很多,今天为大家分享一下通信中常见的同步、异步,单工、双工通信的区别。
同步、异步通信
通信分为串行和并行通信,一般串行通信的应用场合更多,比如:UART、 I²C、 SPI、 CAN等这些都属于串行通信。
串行通信一般又分为同步和异步通信,同步通信需要同步时钟信号,而异步通信则不需要同步时钟信号。
概念:
同步通信:发送方发出数据后,等接收方发回响应以后才发下一个数据包的通讯方式。
异步通信:发送方发出数据后,不等接收方发回响应,接着发送下个数据包的通讯方式。
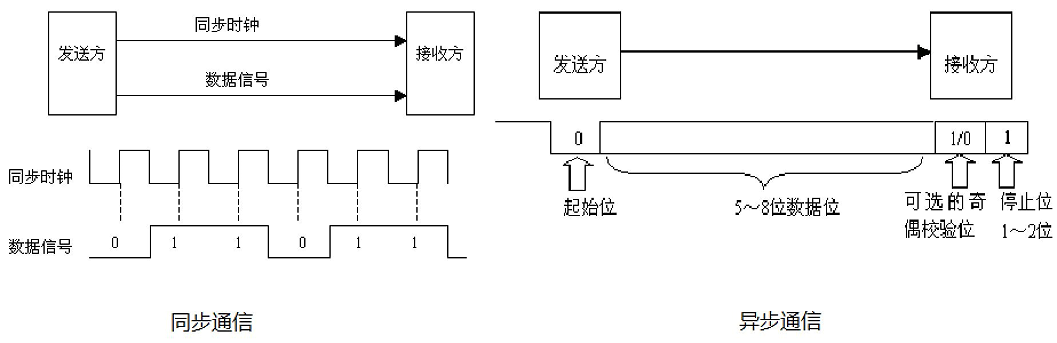
通过定义你应该能测到:像I²C、 SPI这种具有同步时钟的就是同步通信;像UART、 CAN这种没有同步时钟的就是异步通信。
单工、 双工通信
通信根据传输的方法分为单方向通信(即单工),和双向通信(即双工)。
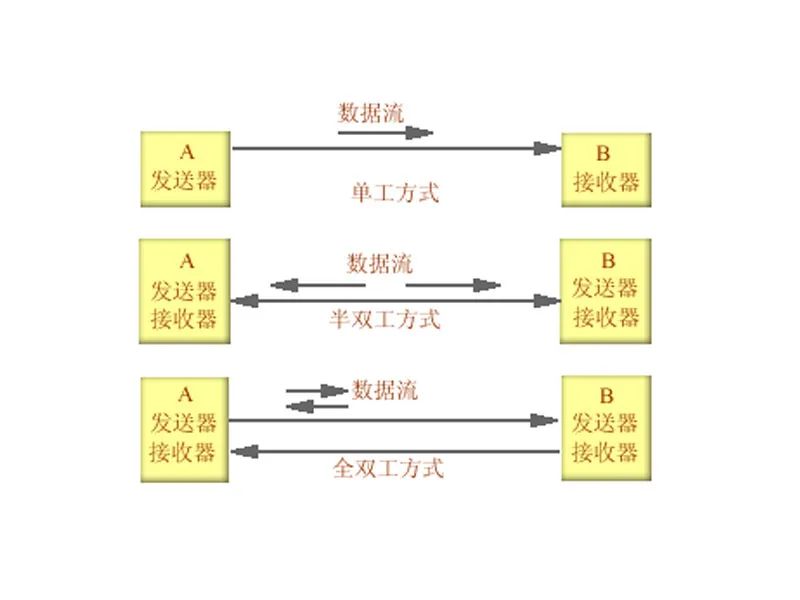
单工通信单工即数据传输只在一个方向上传输,方向是固定的,不能实现双向通信(A发送数据给B,而B不能发送数据给A),如:收音机广播,你只能听到广播站发出的广播(数据),而你不能反向给广播站发送广播。
双工通信双工分为 半双工 和 全双工。
半双工半双工比单工先进一点,传输方向可以切换,允许数据在两个方向上传输。
但是某个时刻,只允许数据在一个方向上传输,可以基本双向通信。
像485、I²C就属于半双工通信。
全双工比半双工更先进的是全双工,允许数据同时在两个方向传输。发送和接收完全独立,在发送的同时可以接收信号,或者在接收的同时可以发送。它要求发送和接收设备都要有独立的发送和接收能力。
如:RS232、SPI通信等。
用一张图的说明:单工、半双工、全双工通信:
最后
通信领域需要掌握的知识比较多,还有像什么传输方式、编码方式、通信协议等。
对于初学者可能看到这些概念都想放弃了,其实,拆解每一个知识点都不难。
原文标题:通信教程 | 同步、异步,单工、双工通信的区别?
文章出处:【微信公众号:strongerHuang】欢迎添加关注!文章转载请注明出处。
-
开环和闭环功放的区别,优缺点,应用场合有什么不同?2024-11-04 949
-
不同频率晶振的应用场合2023-12-15 2175
-
kk模组的具体应用场合2023-11-18 2582
-
串行通信的基本原理、应用场景及主要优势2023-09-26 5960
-
高精度电压源的应用场合有哪些2023-06-12 1763
-
基于FPGA实现多路UART/SPI通信系统2022-10-24 1924
-
串行通信的相关资料推荐2021-12-24 691
-
串行通信接口的基本知识2021-07-16 1507
-
如何根据应用场合选择功率分析仪的通讯接口?2021-05-08 1741
-
基于Z85C30串行通信控制器实现串行通信系统的应用设计2021-05-05 4107
-
电感和磁珠的区别及应用场合2016-10-10 893
-
简述FPGA和DSP的优缺点及使用场合2016-02-16 1203
-
18b20应用场合2013-07-26 2846
-
OSTR的注意问题和应用场合2009-11-26 1639
全部0条评论

快来发表一下你的评论吧 !
