

控制器局域网络(CAN)的详细介绍
今日头条
描述
CAN是控制器局域网络的简称,是由以研发和生产汽车电子产品著称的德国BOSCH公司开发的,并最终成为国际标准,是国际上应用最广泛的现场总线之一。
什么是通讯
为了更好地理解CAN通讯概念,我们借助人与人之间的通讯形式来了解汽车的这种内部通讯模式。当然,首先我们得清楚什么是通讯:
“通讯是两个或两个以上参与者之间交换信息的有意识活动,目的是通过符号和语义规范的共享系统来发送或接收信息。通讯的基本步骤包括通讯意图的形成,信息的组成,信息的编码,信号的发送,信号的接收,信息的解码以及最终的信息解释,这一系列步骤也称之为协议。”
CAN通讯的引入
比较人与汽车之间的交流/通讯行为后发现:两者概念基本相同。当人们想在一个小组中交流时,通常有几种交流的可能性。一种可能性是:如果一个人想与几个人共享某些信息,则他可以以特定的方式发送该信息,并向每个感兴趣的人重复相同的信息,始终遵循某种协议,即确保所发送信息的通信规则。我们可以将这个概念应用于汽车。
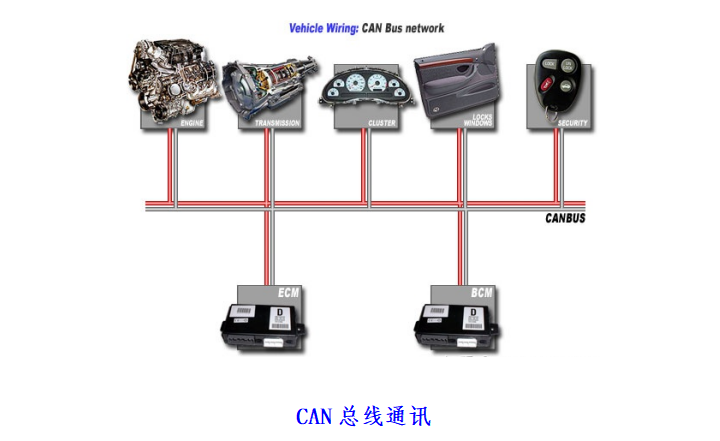
过去,如果控制单元,传感器或执行器要发送某些信息,则必须通过特定的通信通道(电缆)将其发送给每个相关方。例如,如果发动机控制单元要与变速箱控制单元共享信息,则它必须对要发送的每个数据使用特定的介质(电缆)。如果后者想向前者发送信息,情况也是如此,这样就导致需要很多电缆。

这样的通讯系统的缺点是大量的接线和连接,这意味着重量,复杂性,潜在的故障和额外的成本。此外,未明确连接以接收该信息的其他单元无法知道该信息。随着控制单元数量的增加也会使其可靠性成为噩梦。所以为了克服所有的这些问题,引入了串行通信,这样电缆连接的数量远少于共享信号所需的数量,所以所需的信息会在数据包中一个接一个地发送信息。
CAN通讯的概念
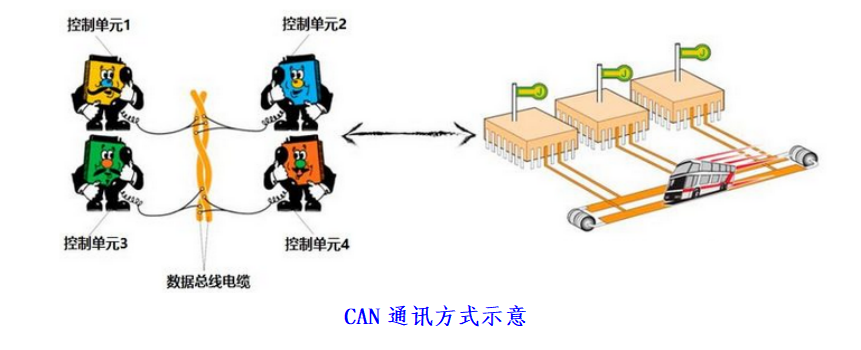
如果我们将串行通信比喻为人类交流,则可以说一个人使用相同的交流通道将其信息发送给其他人,并且每个人都可以根据各自需要获取信息。例如,一个人可能会向一群人大声说“明天会下雨”。这群人都将听到并且也理解该信息,但并非所有人都对此信息感兴趣,因此他们将丢弃它并等待下一条消息。
这样我们就可以定义有关CAN总线的第一个理论概念,CAN通讯的数据传输方式类似于电话会议或视频会议。一个人(控制单元)发送其数据,将其输入网络,而其他人“共同收听”该数据。其中一部分人对此数据很有趣,因此他们使用它。另一部分人可能对该特定数据不感兴趣并将其丢弃。
高低速CAN两种总线架构的基本概念
在汽车的CAN总线系统中,上述概念已应用于大多数控制单元,能够在某些特定系统之间创建“本地网络”,从而建立不同级别的重要性和传输速度。
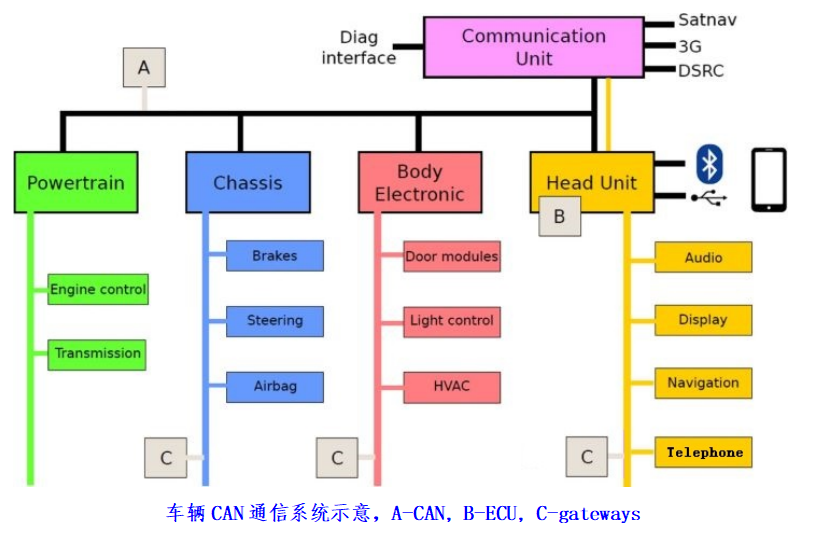
这样的好处是,因为它是一种可扩展的通讯方法,所以能够根据需要进行较大且复杂的通讯。
那么这些“本地网络”的实现则是通过ISO 的串行通讯协议ISO-11898 和 ISO-11519所规定的CAN总线架构来实现。
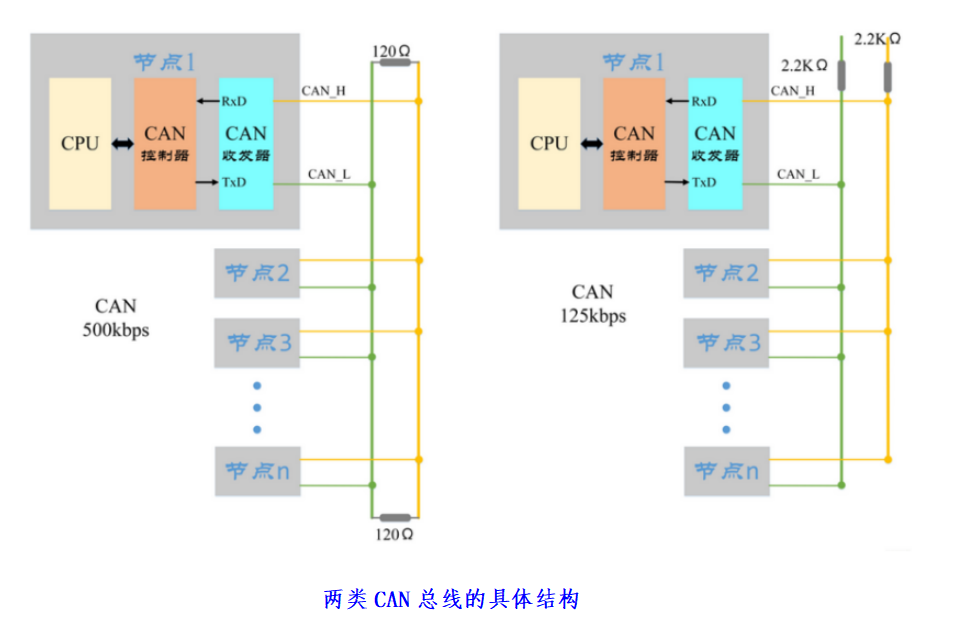
①ISO-11898 定义了通信速率为 125 kbps ~1Mbps 的高速 CAN 通信标准,属于闭环总线,传输速率可达1Mbps,总线长度≤40米。
②ISO-11519 定义了通信速率为 10~125 kbps 的低速 CAN 通信标准,属于开环总线,传输速率为40kbps时,总线长度可达1000米。
这里CAN通讯速率(位速率)是指单位时间内总线上传输的信息量,即每秒能够传输的二进制位的数量,单位是bit per second,bps。
上述的高低速CAN总线架构广泛应用于汽车,比如动力网采用高速CAN总线架构,舒适网采用低速CAN总线架构。
CAN总线结构
了解了高低速CAN两种总线架构的基本概念后,再了解CAN总线的具体结构。我们可以看到上图两类CAN总线结构都有CAN_H,CAN_L两根线和多个节点。
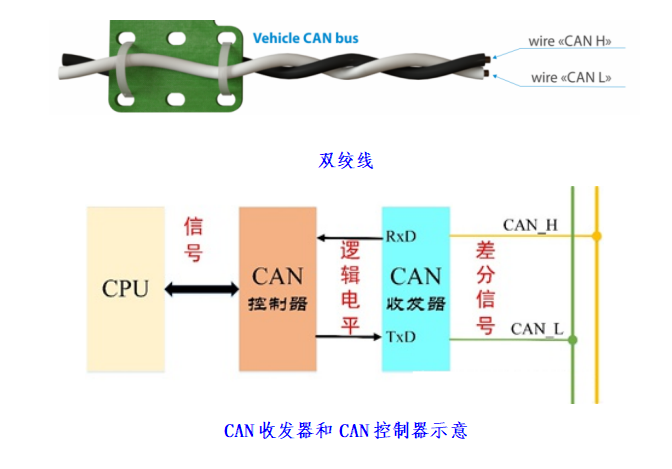
其中CAN_H和CAN_L线是以双绞形式缠绕,每个节点都有CAN收发器和CAN控制器,CAN收发器和CAN控制器可能集成在芯片,也可能是独立于芯片。
审核编辑:汤梓红
-
[原创]无线局域网络以太网WIFI TCP/IP接口灯光控制器2010-04-23 4426
-
商用车控制系统局域网络(CAN )通信协议2012-08-15 10357
-
XC800控制器局域网络控制单元2012-08-20 2456
-
转:STM32CubeMX系列教程12:控制器局域网络(CAN)2016-07-06 9980
-
CAN (Control Area Network) 控制器局域网络是什么?2020-11-05 2679
-
CAN控制器局域网络简析2021-07-12 1973
-
控制器局域网络的音频信号传输2009-06-11 743
-
控制器局域网CAN2010-03-22 625
-
无线局域网络简介(WLAN)2009-08-04 2193
-
配置控制器局域网络(CAN)位时序,优化系统性能2016-01-07 728
-
控制器局域网(CAN)实施指南2017-06-06 1626
-
基于控制器局域网络CAN实现高压开关柜故障检测系统的设计2020-06-26 1345
-
基于SAEJ1939无线通信数传协议的CAN(控制器局域网络)总线批量数据传输2022-05-07 1905
-
控制器局域网(CAN)应用笔记2023-11-28 678
-
低功率网络控制器局域网络(CAN)收发器SN65HVD1040-HT数据表2024-07-09 661
全部0条评论

快来发表一下你的评论吧 !
