

 Demo系统机械参数的设置和配方文件的管理
Demo系统机械参数的设置和配方文件的管理
今日头条
描述
内容回顾
回顾上节课程我们对运动控制+机器视觉的Demo的系统人机界面和主线程的框架进行了大致的介绍,接下来我们将对各个模块的实现过程进行介绍,方便大家理解掌握。
今天我们将对系统机械参数的设置和配方文件的管理这两大模块进行介绍讲解。
01开发环境介绍
一、硬件平台

运动控制机器视觉实训平台,包括VPLC532视觉控制器、4个步进电机、相机、光源、光源控制器、带HDMI接口的工业显示屏等相关硬件配置。
二、软件平台
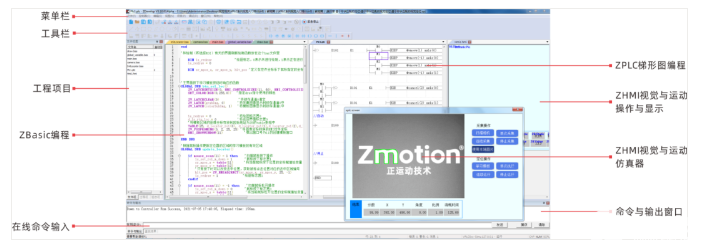
ZDevelop 是正运动技术ZMoiton系列运动控制器的PC端程序开发调试与诊断软件,通过它用户能够直接对控制器进行程序编辑与配置,快速开发应用、实时诊断系统运行参数以及对运动控制。
ZDevelop支持三种编程方式,分别为ZBasic、ZPLC梯形图、ZHMI组态,使用ZDevelop软件编写的程序可以下载到正运动控制器里,也可以下载到仿真器在PC平台仿真运行。
02系统机械参数的设置与保存
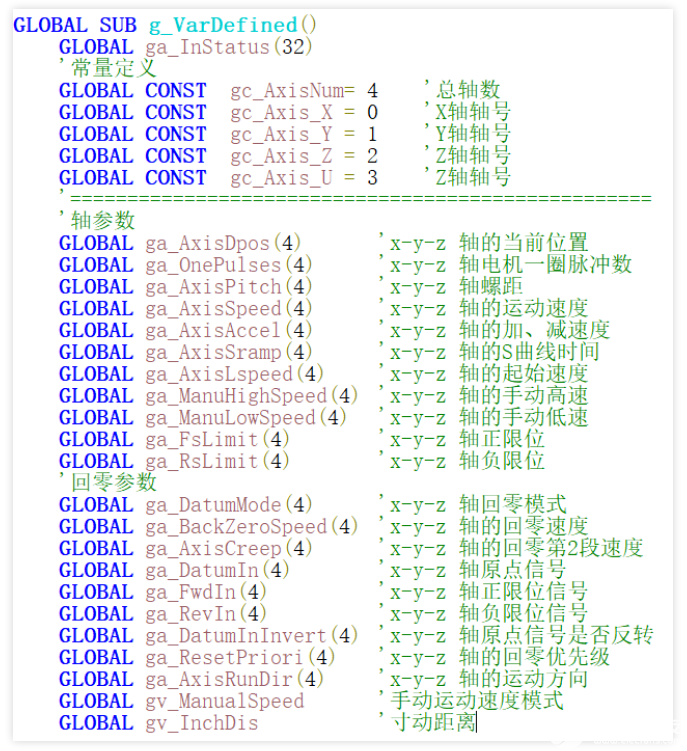
一、机械参数相关变量的定义
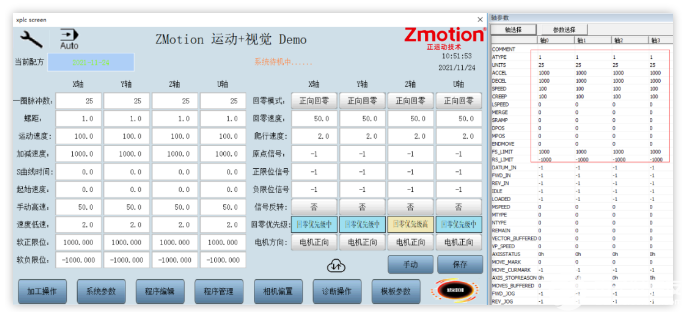
二、机械参数设置HMI界面设计
通过Hmi里面的值显示和字状态切换等元件完成以下界面的设计。

三、机械参数的保存与生效
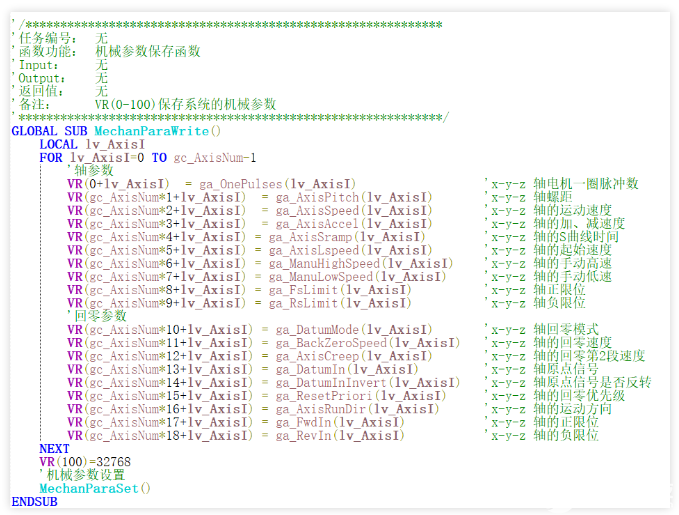
当点击保存按钮时调用函数 MechanParaWrite( ) ,将机械参数的保存到VR(0)-VR(100)实现掉电保存的目的。
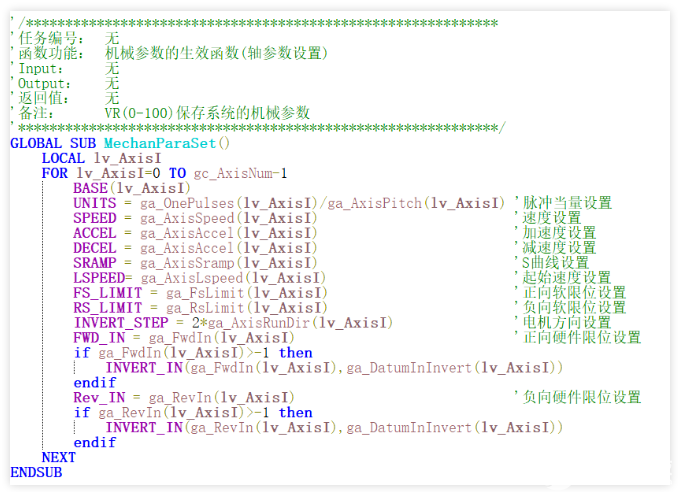
将机械参数保存到VR寄存器之后,然后调用函数 MechanParaSet() ,进行机械参数的生效。
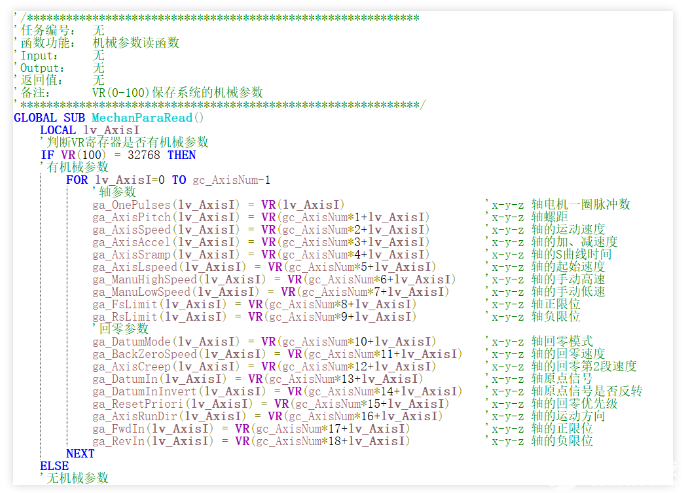
四、 系统重启后读取机械参数
在系统初始化函数 MainInit() 里面调用机械参数的读取函数 MechanParaRead() 和机械参数的设置函数 MechanParaSet() ,实现机械参数的恢复。
五、 保存下载到控制器中调试效果
03配方文件的编辑与保存
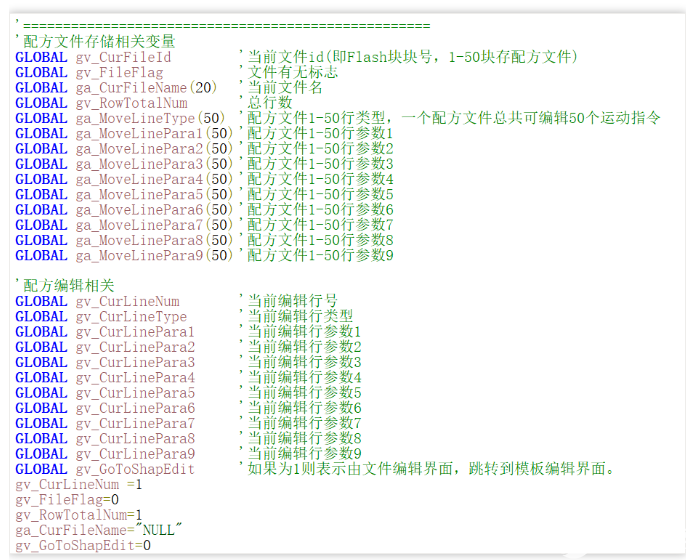
一、 配方文件相关变量的定义
二、 配方文件行类型规划
1.空行
ga_MoveLineType =0 空行
2.单轴运动
ga_MoveLineType =1 单轴运动
g_MoveLinePara1: 轴选择;
g_MoveLinePara2: 运动距离;
g_MoveLinePara3:0-相对运动/1-绝对运动;
g_MoveLinePara4:运动速度
3.三轴直线插补
ga_MoveLineType =2 三轴直线插补
g_MoveLinePara1: X轴运动距离;
g_MoveLinePara2: Y轴运动距离;
g_MoveLinePara3: Z轴运动距离;
g_MoveLinePara4:0-相对运动/1-绝对运动;
g_MoveLinePara5:插补和速度;
g_MoveLinePara6:0-针尖示教/1-相机示教
4.三点圆弧
ga_MoveLineType =3三点圆弧
g_MoveLinePara1: X轴中间点位置;
g_MoveLinePara2: Y轴中间点位置;
g_MoveLinePara3: X轴结束点位置;
g_MoveLinePara4: Y轴结束点位置;
g_MoveLinePara5:0-相对运动/1-绝对运动;
g_MoveLinePara6:插补合速度;
g_MoveLinePara7:0-针尖示教/1-相机示教
5.圆心圆弧
ga_MoveLineType =4圆心圆弧
g_MoveLinePara1: X轴终点位置;
g_MoveLinePara2: Y轴终点位置;
g_MoveLinePara3: X轴圆心位置;
g_MoveLinePara4: Y轴圆心位置;
g_MoveLinePara4:0-逆时针/1-顺时针;
g_MoveLinePara6:0-相对运动/1-绝对运动;
g_MoveLinePara7:插补合速度;
g_MoveLinePara8:0-针尖示教/1-相机示教
6.输出口设置
ga_MoveLineType =5输出口输出/复位;g_MoveLinePara1: 输出口选择;g_MoveLinePara2: 输出口状态;g_MoveLinePara3: N毫秒后对读取输出口状态取反,0表示不取反;
7.输入口检测
ga_MoveLineType =6输入口检测;
g_MoveLinePara1: 输入口选择;
g_MoveLinePara2: 输入口检测状态;
g_MoveLinePara3: 检测超时时间(超过这个时间配方程序将停止并报警)
8.等待延时
ga_MoveLineType =7等待延时;
g_MoveLinePara1: 等待时间;
9.视觉纠偏1-单点匹配
ga_MoveLineType =8视觉纠偏1-单点匹配;
(g_MoveLinePara1,g_MoveLinePara2,g_MoveLinePara3) 纠偏拍照位(x,y,z)
(g_MoveLinePara4,g_MoveLinePara5,g_MoveLinePara6) 匹配到的基准坐标(x,y,角度)
g_MoveLinePara7,模板编号
g_MoveLinePara8,运动到拍照位的速度
10.视觉纠偏2-双mark点匹配
ga_MoveLineType =9视觉纠偏2-双mark点匹配;
(g_MoveLinePara1,g_MoveLinePara2,g_MoveLinePara3) 纠偏拍照位1(x1,y1,z)
(g_MoveLinePara4,g_MoveLinePara5,g_MoveLinePara3) 纠偏拍照位1(x2,y2,z)
(g_MoveLinePara6,g_MoveLinePara7,g_MoveLinePara8) 匹配到的基准坐标(x,y,角度)
g_MoveLinePara9 模板编号1+10*模板编号2+100*运动到拍照位的速度
11.连续插补
ga_MoveLineType =10连续插补;
g_MoveLinePara1: 0-关闭/1-打开连续插补;
12.拐角减速设置
ga_MoveLineType =11拐角减速设置;
g_MoveLinePara1: 0-关闭/1-打开拐角减速功能;
g_MoveLinePara2: 开始减速角度;
g_MoveLinePara3:结束减速角度;
g_MoveLinePara4:SP速度(等比减速用)
13.自动倒角功能
ga_MoveLineType =12自动倒角功能;
g_MoveLinePara1: 0-关闭/1-打开 自动倒角功能;
g_MoveLinePara2: 倒角半径
三、 配方编辑HMI界面设计

实现点击上一行、下一行实现当前编辑行行号的切换,点击行类型实现当前编辑行行类型的选择。
四、 配方文件的编辑
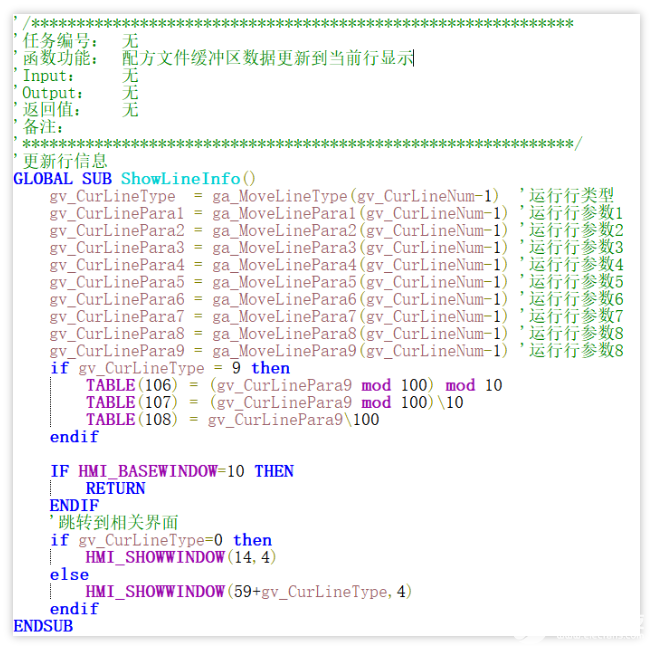
1.配方文件缓冲区数据更新到当前行显示
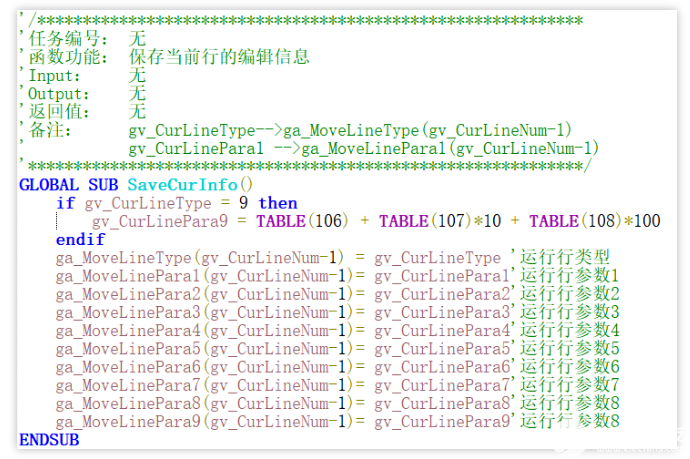
2.保存当前行的编辑信息
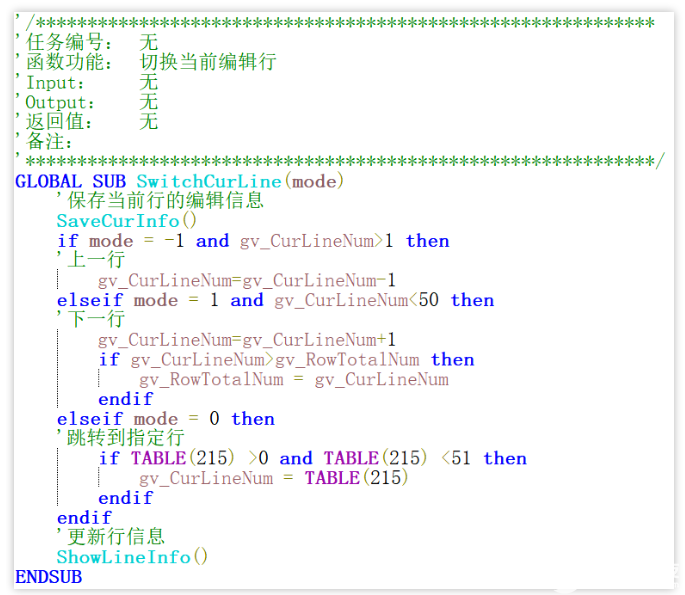
3.行切换
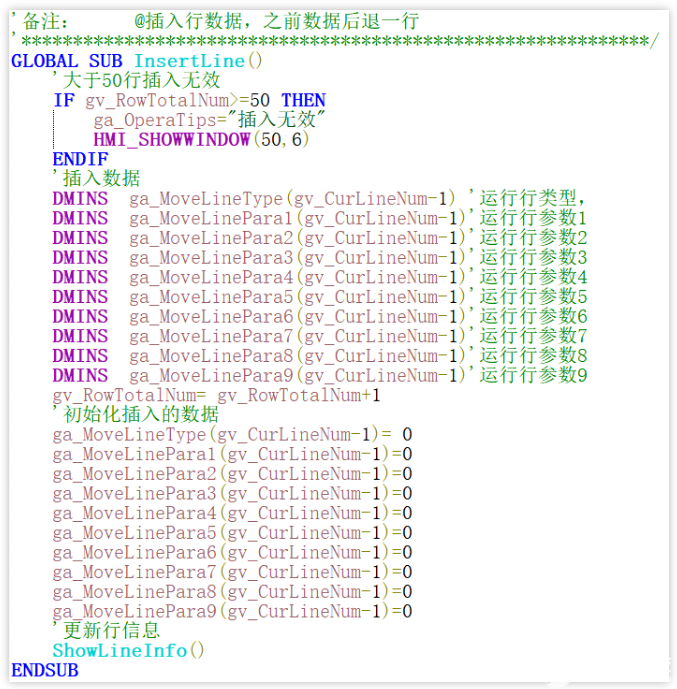
4.行插入
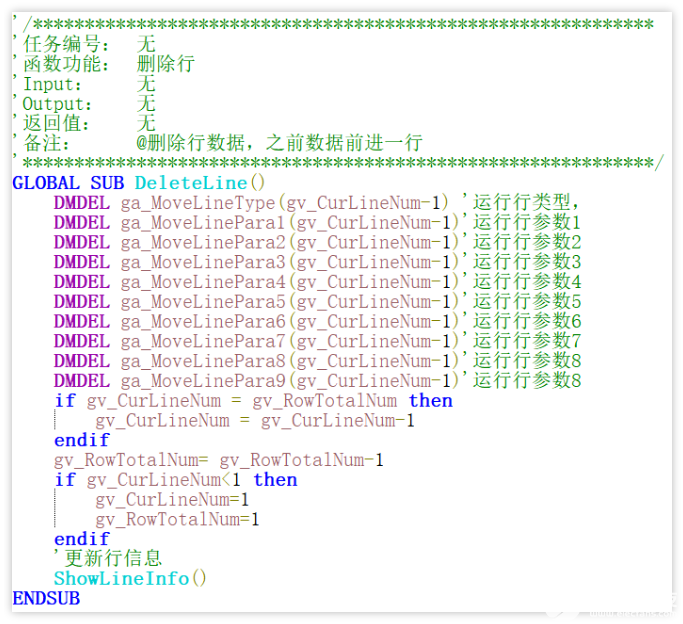
5.行删除
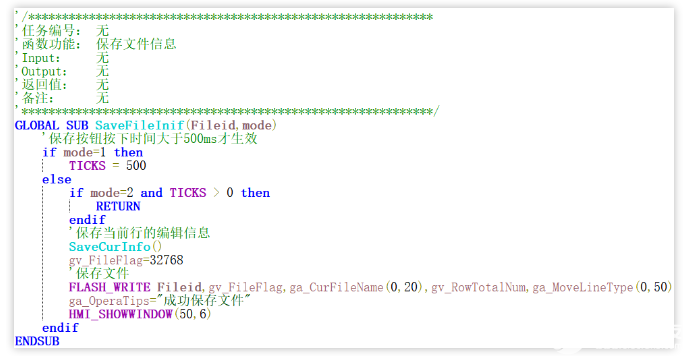
五、配方文件的保存
当点击保存按钮时调用函数SaveFileInif(Fileid,mode),将配方文件保存到对应的Flash块里面。
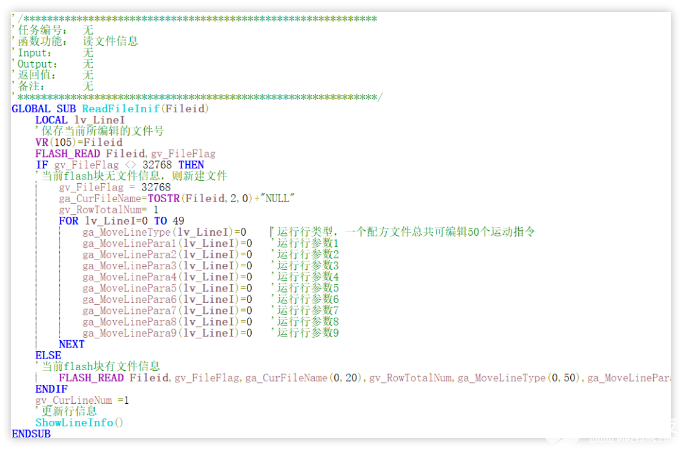
六、配方文件的读取
在系统重启后或者切换文件时需要我们重新读取配方文件里面的数据,这时候我们可以通过调用函数ReadFileInif(Fileid)实现。
本次,正运动技术 运动控制+机器视觉Demo软件框架(一):机械参数和配方文件的管理, 就分享到这里。
审核编辑:汤梓红
-
全新电池管理系统BMS (3串计量芯片) Demo2024-07-18 1035
-
PHP 基础 在线文件管理系统(分享)2017-06-29 6354
-
DGUS Ⅱ屏应用技巧:实现配方功能2018-12-14 3756
-
Altium:PCB系统参数设置的保存与调用2019-11-18 2213
-
深圳PCB视觉对位冲床机械手系统有哪些特点及参数?2021-09-25 972
-
用中文版ACAD2000绘制机械图有关系统变量的设置2009-02-14 1598
-
labview设置文件属性2016-12-17 1637
-
配方管理系统RMS2022-03-24 22025
-
Demo系统的移动标定和形状匹配功能2022-04-01 1489
-
如何删除、管理配方数据文件2022-07-11 2880
-
Altium Designer 21系统参数的设置方法2022-08-22 6340
-
Altium Designer 21软件系统参数的设置2022-09-05 3108
-
Allegro 17.4常用系统参数的设置2022-09-23 6669
-
Vivado布线和生成bit参数设置2023-05-16 6683
-
工程机械动态管理智慧运维系统方案2024-12-06 1473
全部0条评论

快来发表一下你的评论吧 !
