

高精度GNSS与标准精度GNSS有何不同
电子说
描述
电子发烧友网报道(文/李宁远)GNSS已经是大家很熟悉的一类定位系统,GNSS系统的测量观测时间短,还能提供三维坐标。但是,也会有各种原因让GNSS系统产生定位误差,卫星误差、大气误差、多路径误差都会导致信号传播时间计算有误让最后的定位产生误差。这种定位误差短则几十米,长则上百米都是有可能的。在GNSS中,有高精度GNSS和标准精度GNSS之分,高精度GNSS随着5G通信的普及和GNSS卫星系统的增加,开始将定位误差不断缩小,并开始向大众市场推开应用。
高精度GNSS与标准精度GNSS有何不同?
其实从根本上说,二者都是在相同的信号上工作。以GPS L1频段的1.5GHz载波为例,在该载波上有一个调制的测距码、伪随机噪声码,标准精度GNSS的接收机就是使用这个测距码来确定距离。对于L1频段的C/A码来说,伪随机噪声码每300公里重复一次,单个码元的长度在300米左右。因此接收器在标准精度GNSS下,按照编码1%到10%的范围定位,其标准精度极限在几米范围内,这还要考虑到冷噪声等其他制约因素。
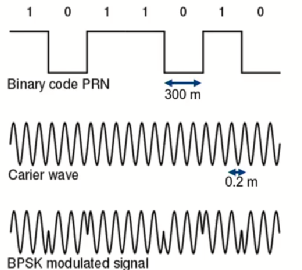
(图源:WikimediaCommons Public Domain)
高精度GNSS就是在基于编码的标准精度GNSS基础上进一步推动这个精度极限,高精度GNSS秘诀在于不使用伪随机噪声码,而是利用载波本身。仍以L1的C/A为例,该载波的波长很短只有20厘米左右,这意味着在20厘米内以10%的精度定位,可以实现2厘米的定位精度。这类似于在测量距离时我们采用更精细的刻度标准。
亚米级精度实现——5G RTK与高精度GNSS融合
高精度GNSS可以实现亚米级范围内高精度定位,在室外环境中实现这一目标的方法之一是通过5G中RTK与高精度GNSS技术的融合。
GNSS定位里差分定位是一个很经典的办法,通过已知精确坐标的基准站提前计算误差,然后将误差带入定位计算中达到消除误差的效果。这种实时动态差分定位技术在5G通信的加持下,可以根据校正数据流去除错误源。校正数据流的困难随着移动通信向着5G发展依靠更快的移动通信和更高的带宽能力逐步得到了解决,校正数据流直接在单播放或者5G广播协议上直接得到解决,可以说是最流行的OSR应用,不仅加快收敛时间,还具有良好的精度。
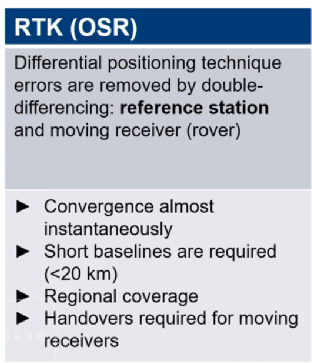
(图源:R&S)
当然这种技术也不是没有缺点,RTK激素和基线很短,需要在靠近参考站的地方使用,范围大概在20公里。这会在某种程度上限制RTK的应用。另外,如果是动态定位,RTK技术还需要进行区域性的切换。
高精度GNSS开始进入大众市场
高精度GNSS此前难以进入大众市场有很多原因。首先以载波为刻度的问题在于载波是符号波,符号波都是相似的同时每20厘米重复一次,重复性带来了远超编码每300公里才重复一次的模糊性。我们可以确认目标在这20厘米内的位置,但是没法确定目标和卫星之间隔了多少个20厘米。解决这一问题,必须要卫星够多,频率够多。
这个解决办法听起来其实很老套,卫星够多,频率够多,分辨率自然就高起来了。但实现这一效果需要的校正数据流成本以及对计算性能的要求在相当长一段时间里不适应消费级的应用。而且,高精度GNSS必须要卫星持续观测才有效,一旦目标短暂丢失GNSS开始重新收敛定位,收敛过程如果过长会影响高精度GNSS在动态应用中的使用。
但随着5G技术发展与GNSS星座的增加,这些限制高精度GNSS普及的难题已经一一得到了解决。如上面所说,连续校正数据流的困难随着移动通信向着5G发展得到了解决,校正数据提供商为了推广大众市场,每个用户的数据成本也正在下降。
高精度GNSS铺开全面应用最重要的一点离不开现在可用的GNSS星座数量以及民用信号频段的不断增加,这意味着高精度GNSS的模糊性问题可以快速地解决。目前很多GNSS模块厂商推出的GNSS IC中还内置了里程表和陀螺仪,补足高精度GNSS在丢失观测目标后的定位,让动态目标的位置不再丢失。这也从另一方面加快了重新定位的收敛时间,在汽车这样的动态定位里高精度GNSS技术的应用也不再受到限制。
原文标题:高精度GNSS进入大众市场,与5G开始融合
文章出处:【微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
审核编辑:汤梓红
-
GNSS系统工程师-深圳2015-03-11 2270
-
意法半导体推出世界首个定位精度达到自动驾驶级别且符合汽车安全标准的多频GNSS接收器2018-03-09 3819
-
高精度GPS模块介绍资料2019-07-01 2124
-
AVT1200 北斗高精度车载定位终端2023-09-08 1127
-
广和通与华大北斗达成全球战略合作,携手打造高精度GNSS定位解决方案2023-09-13 1468
-
全面概述GNSS高精度天线发展2021-04-06 9655
-
自动驾驶、车道导航的高精度GNSS芯片2021-11-15 8222
-
浅析自动驾驶、的高精度GNSS芯片2021-11-17 4730
-
高精度GNSS进入大众市场,与5G开始融合2022-03-25 4047
-
如何安装GNSS模块并实现高精度定位?2023-04-18 2552
-
GNSS模块高精度定位BT-F9PK4规格书2023-04-21 813
-
GNSS终端:位移高精度监测视角下的技术突破2024-01-09 1408
-
高精度GNSS+INS组合导航:速度、位置、姿态全掌握2024-12-11 2940
-
GNSS和INS有什么区别?深度解析高精度组合导航技术2025-05-27 2274
-
GNSS+INS精度有多高?测绘级组合导航系统精度分析2025-06-04 1318
全部0条评论

快来发表一下你的评论吧 !
