

使用workvisual软件对KR C4进行外部轴配置
描述
•操作步骤
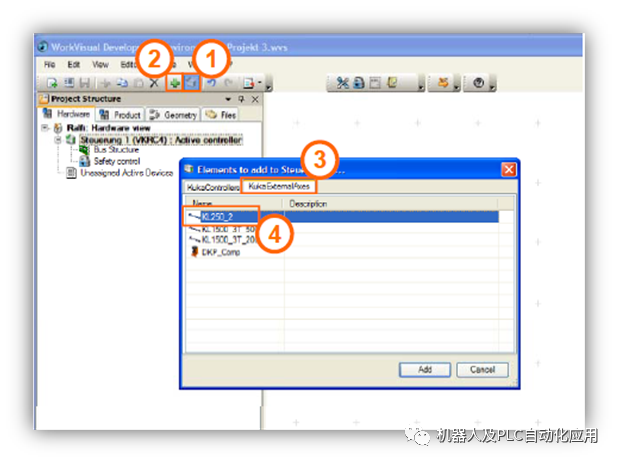
① 进入workvisual软件,打开或创建一个项目,如左图所示。
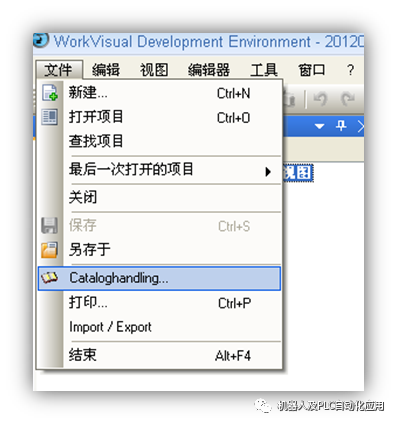
② 通过菜单栏“文件”选项,选择“Cataloghanding…”,如右图所示。
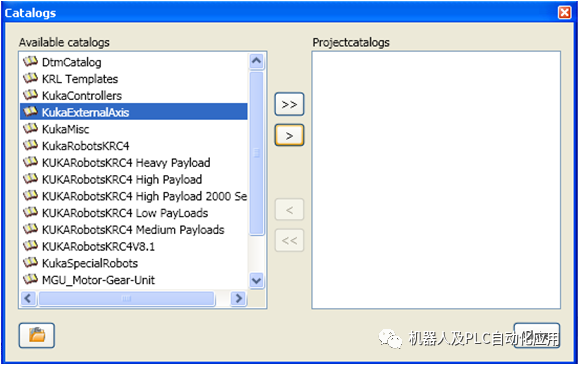
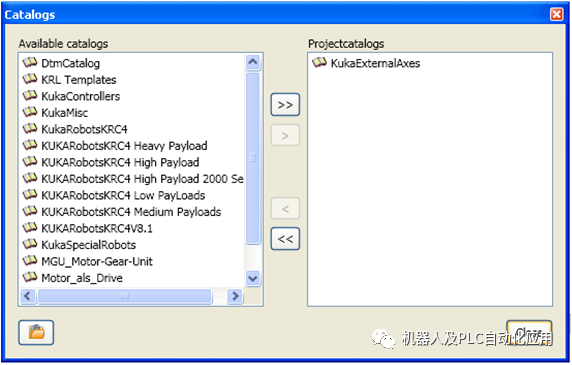
•接着在弹出的选择窗口中,选择样本文件,如左图所示,然后通过添加按钮添加到主目录框中,如右图所示,这样样本导入完成。
③ 激活项目并将样本添加到项目中,如图所示。
(1)激活项目
(2)添加样本
(3)选择外部轴栏
(4)选择需要的外部轴
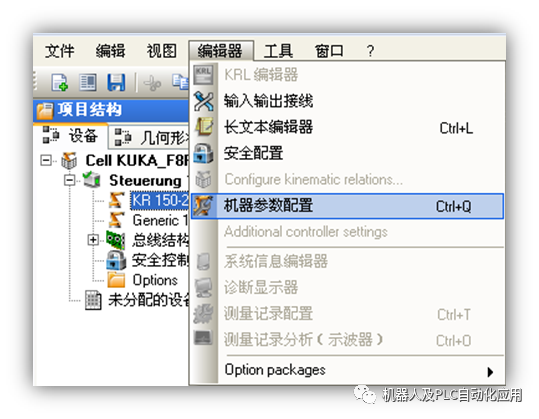
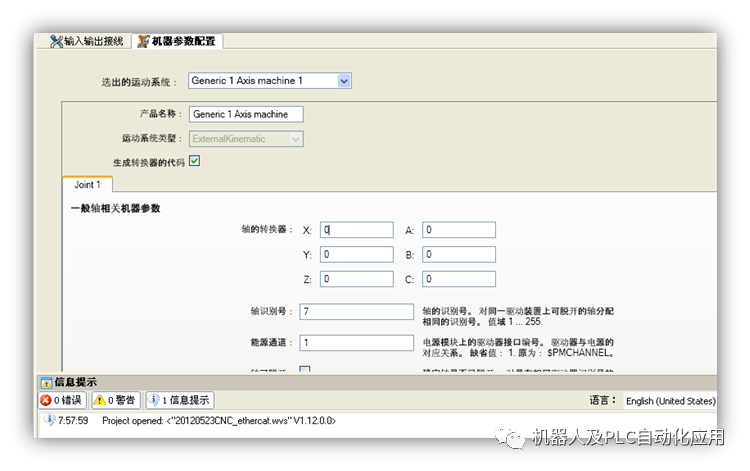
④在项目结构中,选中机器人,单击编辑器菜单,选择“机器参数配置”选项,如左图所示,之后弹出机器人参数配置窗口,如右图所示,在窗口中输入机器人各项参数.
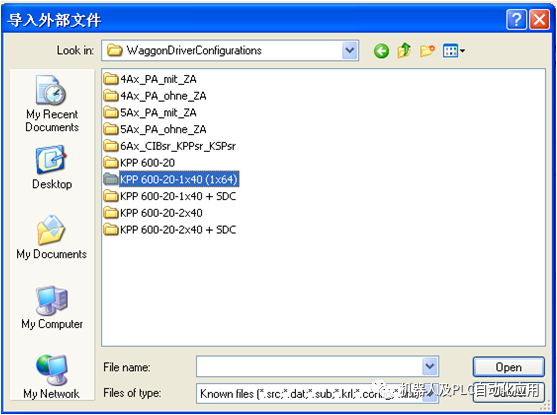
⑤ 进入“文件”界面,加入驱动文件,在这之前,需要到C:Program FilesKUKAWorkVisual2.4WaggonDriverConfigurations找到KPP的驱动文件,如果是是一个外部轴选择KPP600-20-1x40 (1x64),如果是两个外部轴选择KPP 600-20-2x40,把其中的两个文件导入到MADA目录下。
注意:如果是PA的机器人,外部轴通道是连接在KSP上的,因此这边需要选择4Ax_PA_mit_ZA或者5Ax_PA_mit_ZA。
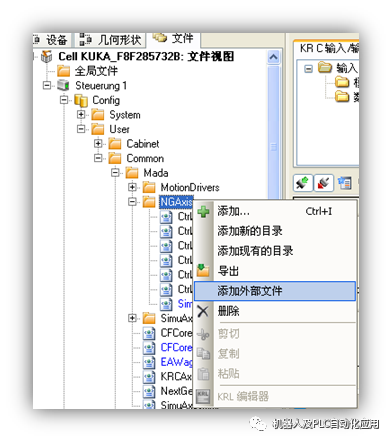
•然后选中“mada”文件夹,右击,选择“添加外部文件”选项,如左图所示,在弹出的导入外部文件窗口中选择“KPP 600-20-1×40(1×64)”并双击打开,选择文件夹中的文件,并单击“Open”按钮,以导入外部文件,如右图所示。
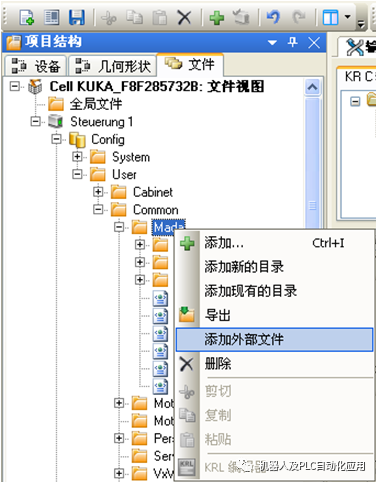
⑥ 导入外部轴配置文件,选中“文件”栏中的“NGAxis”文件夹,并右击选择“添加外部文件”选项,如左图所示。
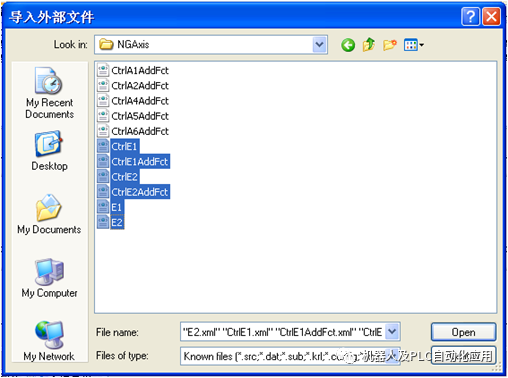
⑦ 选择“NGAxis”文件夹下的相关压缩包文件CtrlE1.xml, CtrlE1AddFct.xml, E1.xml,,如右图所示。如果是轴2系统,则在添加一次,名称换成E2即可.
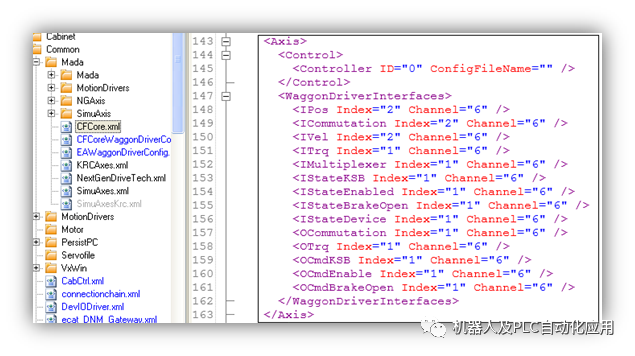
⑧ 在“Mada”文件夹下,选择“SimuAxis”文件夹,找到CFCore.xml,复制如下左图所示的一个块,放到最后,然后把通道改成6,如果是2轴则再复制一个块,通道一个改6一个改7。
⑨ 在“SimuAxis”文件夹下,找到KRCAxes.xml,复制如下右图所示的一个块,把名字改成E1或者E2。
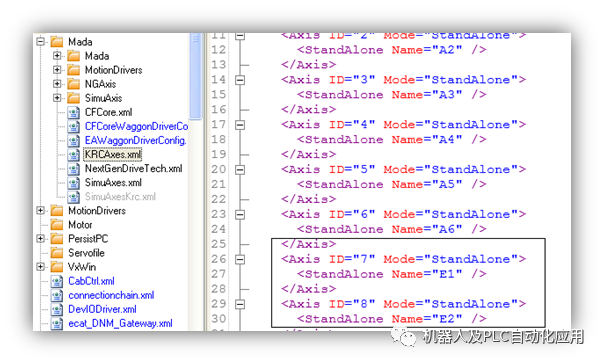
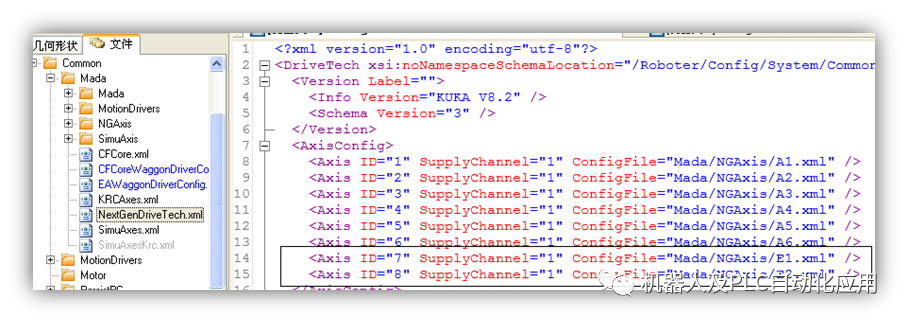
⑩ 在“SimuAxis”文件夹下,找到NextGenDriveTech.xml,如下图所示这样添加第七和第八轴,名字改成E1.xml, E2.Xml。
⑪ 将项目导入机器人,在能在机器人上进行参数的设置。在操作机器人时需注意,将坐标系调至“轴坐标系”下。
审核编辑 :李倩
-
运放电路中的电容C4起什么作用2023-12-10 2361
-
BPI-M5与Odroid C4和树莓派规格比较表2023-09-04 480
-
KUKA大众版8.2系统外部轴配置2023-01-29 4397
-
WorkVisual中的安全配置范围包括哪些呢2022-12-06 1975
-
WorkVisual4.0机器人软件手册下载2021-07-28 2102
-
将GSDML文件接入到WorkVisual中2020-10-30 5040
-
KUKA C4 安装工业以太网软件详细操作步骤2020-10-27 8799
-
WorkVisual中的安全配置2020-09-04 4116
-
WorkVisual中的安全配置知识汇总2020-09-03 4084
-
C4机器人与PLC的通信IO域更改扩展2020-07-13 2885
-
KR C4机器人和LBR iiwa机器人的不同之处2019-07-08 2907
-
C4变身!小摩七彩虹C4!2018-10-29 9591
-
【底盘大PK】雪铁龙C4 L/世嘉2018-07-12 5179
全部0条评论

快来发表一下你的评论吧 !
