

基于MEMS和MR传感器的嵌入式系统姿态测量
电子说
描述
1.介绍:
传统的姿态测量系统采用捷联式惯导系统(SINS),相比平台式惯导系统而言,其具有体积相对更小,成本相对更低,易于安装和维护并且可靠性更高的有点,因此,捷联惯导系统在飞行器导航和姿态测量中得到了广泛的研究和应用。
然而,传统的姿态测量系统包括捷联式惯导普遍具有体积大,重量大,复杂程度高等特点,使得传统的姿态测量系统无法应用于日常应用。同时,传统的捷联惯导系 统一般需要一个寻北系统的辅助来获得载体的方位角,但是传统的寻北系统多为基于陀螺的系统,其体积和复杂度也是日常应用所无法接受的。可见,对于对体积具 有严格限制的嵌入式系统而言,需要研制一种小型的姿态测量系统来满足其姿态测量的要求。MEMS技术和MR技术的快速发展,为研制这种低成本,小体积,高 集成度的姿态测量系统提供了可能,从而可以使得对体积和成本敏感的系统具有姿态测量的能力。
本文论述了由MEMS加速度计和MR传感器组成的姿态测量系统。在本系统中,三轴MEMS加速度计用来获得载体基于重力向量的俯仰角和横滚角,而三轴MR传感器的输出经过以俯仰角和横滚角为参数的矩阵变换后可以给出载体相对于地磁北极的方位角。
2.硬件描述:
本论文论述的姿态测量系统主要由三轴MEMS加速度计,三轴MR传感器,ARM内核微控制器和用于显示结果的LCD显示器组成。
2.1三轴MR传感器
本系统选用了Honeywell的HMC2003三轴磁阻传感器。HMC2003是一个高灵敏度三轴MR传感器,它是由单轴MR传感器HMC1001和双 轴MR传感器HMC1002组合而成。其精度可以达到400ugauss,量程为±2gauss,灵敏度为1V/gauss.磁阻传感器在经历了强磁场之 后会被磁化而引起磁滞,从而引起输出信号的失真,Honeywell的“set/reset”功能可以消除这种磁滞而使传感器恢复到正常的工作状态。
2.2 三轴MEMS加速度计
本系统中的加速度计选用了Freescale的MMA7260Q单片三轴加速度计。MMA7260Q是一个低成本的电容式微机械加速度计,其内部具有信号调整、单极低通滤波器、温度补偿等功能,其量程可以通过编程选择1.5g/2g/4g/6g之一。其主要特点如下:

2.3 微处理器
本系统选用的微处理器为Atmel公司的At91sam7s64 ARM微控制器。At91sam7s64是基于32位ARM内核的低管脚数高性能并且内置Flash的微控制器。其内部集成了64k字节Flash和 16k字节的SRAM以及大量的外设接口,例如两个USART接口,可以分别用来与PC机通信和控制串口LCD屏显示测量结果。其具有一个10位的SAR 逐次逼近式A/D转换器,并具有8选1模拟复用器。A/D转换器的采样率可以达到384ksps.At91sam7s64的ARM内核的最高运行频率可以 达到55MHz,0.9Mips/MHz,以上的特点使At91sam7s64非常适合于低成本体积敏感的姿态测量系统。
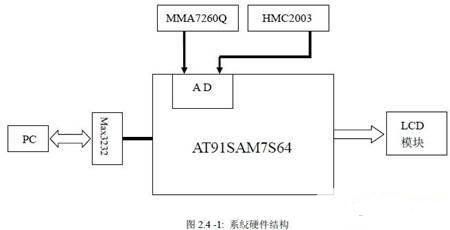
2.4硬件结构:
本系统的硬件结构如图2.4 -1所示。由于At91sam7s64具有片上A/D转换器而且具有8选1模拟复用器,使得MMA7620Q和HMC2003可以直接与微控制器相连而不 必外加A/D转换器和复用器,不仅降低了系统的成本和体积,提高了系统的集成度,同时减少了误差源,提高了精度。经过A/D转换的测量数据经过ARM核的 处理后,被送到串口LCD并通过RS232接口送入PC机进行进一步的分析。
3.姿态参数的获得
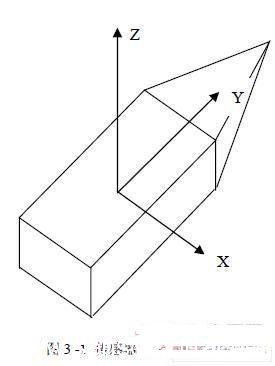
在本系统中,三轴加速度计和三轴MR传感器都以以下的方式安装于电路板上:它们的X轴平行于系统的横轴指向右,Y轴平行于系统的纵轴指向前,X、Y、Z轴定义为右手坐标系统,如图3 -1所示。
3.1俯仰角与横滚角的获得:
为了获得系统基于重力向量的俯仰角θ和横滚角φ,需要使用加速度计的三个输出:Ax, Ay, Az.俯仰角和横滚角可以通过以下公式(1)和公式(2)计算得到。对于微控制器,函数中的arctan(x)需要通过以下公式(3)的泰勒展开后才能计算得到。
-
如何轻松整合传感器到嵌入式系统2017-12-05 4283
-
基于MEMS姿态传感器的温度补偿方法2018-11-06 1872
-
基于MEMS和MR传感器的嵌入式系统姿态测量2018-12-04 2287
-
嵌入式姿态测量系统的姿态参数怎么计算?2019-08-22 2356
-
基于MEMS和MR传感器的姿态测量系统有什么优势?2019-09-04 3630
-
MEMS和MR传感器怎么构成嵌入式系统姿态测量系统?2020-04-08 2592
-
嵌入式姿态测量系统的结构是什么?2020-04-15 2654
-
基于MEMS的姿态测量系统2009-06-08 1189
-
嵌入式系统中模拟传感器的接口设计2011-04-01 940
-
用MEMS和MR传感器实现嵌入式系统姿态测量2012-11-21 1321
-
基于WindowsCENET的嵌入式视觉传感器系统的研究2016-04-18 1047
-
怎么实现基于MEMS姿态传感器温度补偿?这篇文章告诉你2018-01-11 14136
-
嵌入式时栅传感器的测量精度优化2018-01-17 1371
-
MEMS和MR传感器组成姿态测量系统2018-03-12 2783
-
一种基于多种MEMS传感器的嵌入式姿态测量系统设计详解2018-08-09 2814
全部0条评论

快来发表一下你的评论吧 !
